零输入响应与零状态响应
- 格式:doc
- 大小:192.50 KB
- 文档页数:8
rl零状态响应和零输入响应RL零状态响应和零输入响应是控制系统中两个重要的概念,它们分别描述了系统在不同输入条件下的响应特性。
在介绍这两个概念之前,我们先来了解一下什么是零状态和零输入。
零状态指的是系统起始时刻的状态,也就是系统还没有受到任何输入时的状态。
零输入则是指系统在没有外部输入的情况下自身产生的响应。
零状态响应是指系统在初始时刻没有输入而产生的响应。
换句话说,系统的初始状态会对零状态响应产生影响。
在实际应用中,我们通常通过给系统一个初始条件来观察其零状态响应。
例如,一个电路系统,我们可以将它充电到一个初始电压,然后切断外部输入,观察电路在没有输入的情况下的响应。
系统的零状态响应与其初始状态和系统自身的特性有关。
通常来说,一个稳态系统的初始状态对其零状态响应影响较小,而非稳态系统的初始状态可能会产生较大的影响。
系统的初始状态对零状态响应的影响也与系统的稳定性和数字信号的特性有关。
零输入响应则是指系统在没有外部输入的情况下自身产生的响应。
这个响应是由系统自身的特性决定的,与初始状态无关。
通过观察系统的零输入响应,我们可以了解到系统自身的特性,比如它的自然频率、阻尼比等。
零输入响应在实际应用中广泛应用于信号处理、滤波器和控制系统中。
在语音信号的处理中,我们可以通过对一段没有语音的信号进行处理,得到系统的零输入响应,从而了解系统的特性,比如它的频率响应。
在控制系统中,我们经常遇到在没有外部控制信号的情况下,系统会产生一些自身变化的情况,这就是系统的零输入响应。
总结起来,RL零状态响应和零输入响应是控制系统中的两个重要概念。
零状态响应是指系统在初始时刻没有输入而产生的响应,它与系统的初始状态和稳定性有关;零输入响应是指系统在没有外部输入的情况下自身产生的响应,它与系统的特性有关,与初始状态无关。
了解这两个概念可以帮助我们更好地理解和设计控制系统。
信号与系统第8讲零输入响应和零状态响应零输入响应和零状态响应的定义 ⏹从引起系统响应的根源出发,将系统全响应分为零输入响应和零状态响应,即 ⏹零输入响应是指没有外加激励信号(零输入),仅由系统内部初始储能(电容储有电场能、电感储有磁场能)引起的响应; ⏹零状态响应是指系统内部储能为零(零状态),仅由系统的外部的激励引起的响应。
)()()(t y t y t y zs zi +=零输入响应的求解设n 个特征根为 ()(1)(2)1210()()()'()()0n n n n n y t a y t a y t a y t a y t ----+++++=L 00111=++++--a a a n n n λλλΛ其特征方程为 12.nλλλL 零输入下,系统的微分方程为 系统的零输入响应与微分方程的齐次解相同 以下分三种情况讨论零输入响应的求解(2)若存在共轭复根,如 1,2j λαβ=±3123()(cos sin ),0n t t t zi n y t c t c t e c e c e t λλαββ=++++≥L (3) 若这些特征根中含有重根,设 r 12r λλλ===L 111121()[()],0n r t t t r zi r r n y t c c t c t e c e c e t λλλ+-+=++++++≥L L 1212(),0n t t t zi n y t c e c e c e t λλλ=+++≥L (1)若这些特征根都是单根,则由起始状态值确定待定系数【解】 特征方程为 其特征根为 λ1 = -1, λ 2= -3零输入响应为: (0)1,(0)2y y --'==得到:最后得到: 根据起始条件: 例1 已知系统微分方程应的齐次方程为: (0)1,(0)2y y --'==,求系统零输入响应。
)(3)('4)(''=++t y t y t y 0342=++λλ312()t tzi y t c e c e --=+312'()3t tzi y t c e c e --=--121=+c c 2321=--c c 251=c 232-=c 353()(),022t t zi y t e e t --=-≥例2 已知系统微分方程相应的齐次方程为:(0)1,(0)2y y --'==,求系统零输入响应。
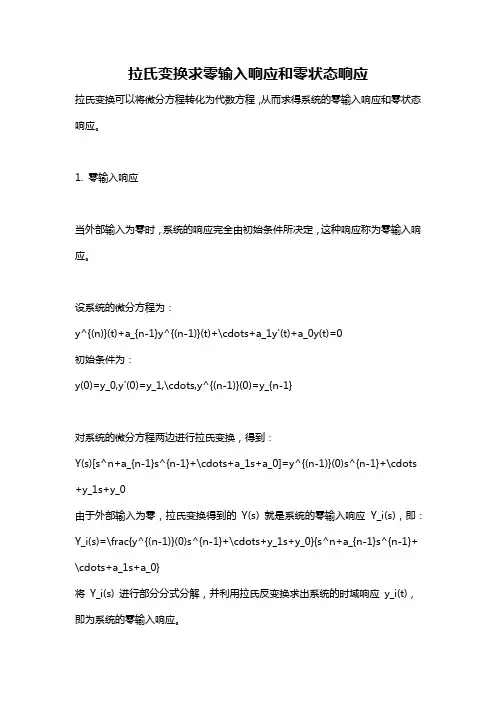
拉氏变换求零输入响应和零状态响应拉氏变换可以将微分方程转化为代数方程,从而求得系统的零输入响应和零状态响应。
1. 零输入响应当外部输入为零时,系统的响应完全由初始条件所决定,这种响应称为零输入响应。
设系统的微分方程为:y^{(n)}(t)+a_{n-1}y^{(n-1)}(t)+\cdots+a_1y'(t)+a_0y(t)=0初始条件为:y(0)=y_0,y'(0)=y_1,\cdots,y^{(n-1)}(0)=y_{n-1}对系统的微分方程两边进行拉氏变换,得到:Y(s)[s^n+a_{n-1}s^{n-1}+\cdots+a_1s+a_0]=y^{(n-1)}(0)s^{n-1}+\cdots +y_1s+y_0由于外部输入为零,拉氏变换得到的Y(s) 就是系统的零输入响应Y_i(s),即:Y_i(s)=\frac{y^{(n-1)}(0)s^{n-1}+\cdots+y_1s+y_0}{s^n+a_{n-1}s^{n-1}+ \cdots+a_1s+a_0}将Y_i(s) 进行部分分式分解,并利用拉氏反变换求出系统的时域响应y_i(t),即为系统的零输入响应。
2. 零状态响应当初始条件为零,外部输入不为零时,系统的响应称为零状态响应。
设系统的微分方程为:y^{(n)}(t)+a_{n-1}y^{(n-1)}(t)+\cdots+a_1y'(t)+a_0y(t)=b_mu^{(m)}(t)+\cdots+b_1u'(t)+b_0u(t)其中,u(t) 是外部输入,m 是n 的最大值。
对系统的微分方程两边进行拉氏变换,得到:Y(s)[s^n+a_{n-1}s^{n-1}+\cdots+a_1s+a_0]=U(s)[b_ms^m+\cdots+b_1s +b_0]由于初始条件为零,拉氏变换得到的Y(s) 就是系统的零状态响应Y_s(s),即:Y_s(s)=\frac{U(s)[b_ms^m+\cdots+b_1s+b_0]}{s^n+a_{n-1}s^{n-1}+\cd ots+a_1s+a_0}将Y_s(s) 进行部分分式分解,并利用拉氏反变换求出系统的时域响应y_s(t),即为系统的零状态响应。
零输⼊响应与零状态响应1.零输⼊响应与零状态响应在Matlab中,lsim函数还可以对带有⾮零起始状态的LTI系统进⾏仿真,使⽤⽅法为y=lsim(sys,u,t,x0),其中sys表⽰LTI系统,⽮量u和t分别表⽰激励信号的抽样值和抽样时间,⽮量x0表⽰该系统的初始状态,返回值y是系统响应值。
如果只有起始状态⽽没有激励信号,或者令激励信号为0,则得到零输⼊响应。
如果既有初始状态也有激励信号,则得到完全响应。
请注意lsim函数只能对⽤状态⽅程描述的LTI系统仿真⾮零起始状态响应,函数ss(对传递函数描述的LTI系统将失效,函数tf)。
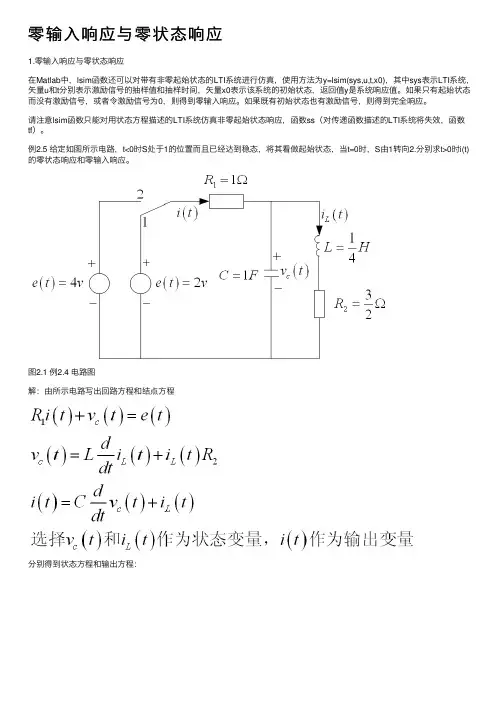
例2.5 给定如图所⽰电路,t<0时S处于1的位置⽽且已经达到稳态,将其看做起始状态,当t=0时,S由1转向2.分别求t>0时i(t)的零状态响应和零输⼊响应。
图2.1 例2.4 电路图解:由所⽰电路写出回路⽅程和结点⽅程分别得到状态⽅程和输出⽅程:下⾯将⽤两种⽅法计算完全响应。
第⼀种⽅法:⾸先仿真2V电压e作⽤⾜够长时间(10s)后系统进⼊稳态,从⽽得到稳态值x0,再以该值作为初始值仿真4V电压e作⽤下的输出rf,即是系统的完全响应,为充分掌握lsim函数的使⽤⽅法,还仿真了系统的零状态响应rzs和零输⼊响应rzi。
第⼆种⽅法:构造⼀个激励信号,先保持2V⾜够长时间再跳变为4V,然后即可以零初始状态⼀次仿真得到系统的完全响应r1。
对应程序如下:C=1;L=1/4;R1=1;R2=3/2;A=[-1/R1/C,-1/C;1/L,-R2/L];B=[1/R1/C;0];C=[-1/R1,0];D=[1/R1];sys=ss(A,B,C,D); %建⽴LTI 系统systn=[-10:0.01:-0.01]'; %⽣成-10s 到-0.01s 的抽样时间,间隔为0.01sen=2*(tn<0); %⽣成机理信号的抽样值e(t)=2[rn tn xn]=lsim(sys,en,tn); %仿真t<0时的输出信号x0=xn(length(en),:); %x0记录了初始状态的值t=[0:0.01:10]';e=4*(t>=0); %⽣成激励信号的抽样值e(t)=4ezi=0*(t>=0); %⽣成零输⼊信号的抽样值e(t)=0rzs=lsim(sys,e,t); %仿真零状态响应rzi=lsim(sys,ezi,t,x0); %仿真零输⼊响应rf=lsim(sys,e,t,x0); %仿真完全响应r1=lsim(sys,[en;e],[tn;t]); %⽤另⼀种⽅法仿真完全响应2. 冲激响应与阶跃响应如果分别⽤冲激信号和阶跃信号作激励,lsim 函数可仿真出冲激响应和阶跃响应。
零输入响应与零状态响应一、零输入响应1定义在没有外加激励时,仅有t = 0时刻的非零初始状态引起的响应。
取决于初始状态和电路特性,这种响应随时间按指数规律衰减。
2简介系统的零输入响应完全由系统本身的特性所决定,与系统的激励无关。
当系统是线性的,它的特性可以用线性微分方程表示时,零输入响应的形式是若干个指数函数之和。
指数函数的个数等于微分方程的阶数,也就是系统内部所含"独立"储能元件的个数。
假定系统的内部不含有电源,那么这种系统就被称为"无源系统"。
实际存在的无源系统的零输入响应随着时间的推移而逐渐地衰减为零。
零输入响应是系统微分方程齐次解的一部分。
3起始状态所谓的起始状态,是反映一个系统在初始观察时刻的储能状态。
以电系统为例,我们做如下约定:在研究t=0以后的响应时,把t=0(-)时的值uc(0-)和il(0-)等称为起始状态,而把t=0+时的值uc(0+)和il(0+)以及它们的各阶导数称为初始值或初始条件。
二、零状态响应1定义在动态电路中,动态元件的初始储能为零(即零初始状态)下,仅有电路的输入(激励)所引起的响应。
三、两种响应的区别零状态响应:0时刻以前响应为0(即初始状态为0),系统响应取决于从0时刻开始加入的信号f(t);零输入响应:从0时刻开始就没有信号输入(或说输入信号为0),响应取决于0时刻以前的初始储能。
四、两种响应的判断方法如果有电源激励就是,而元件本身没有电压或电流就是零状态,相反没有电源激励只有元件本身初始值电压电流,就是零输入响应。
五、两种响应的求解方法1零输入响应:就是没有外加激励,由初始储能产生的响应,它是齐次解的一部分;2零状态响应:就是初始状态为零,外加激励产生的响应。
它可以通过卷积积分来求解。
零状态响应等于单位样值相应和激励的卷积。
其中,单位样值相应就是系统函数的反拉式变换或z变换。
六、两种响应之间的联系引起电路响应的因素有两个方面,一是电路的激励,而是动态元件储存的初始能量。

实验七零输入响应与零状态响应一、实验目的1.熟悉系统的零输入响应与零状态响应的工作原理。
2.掌握系统的零输入响应与零状态响应特性的观察方法。
二、实验内容1.用示波器观察系统的零输入响应波形。
2.用示波器观察系统的零状态响应波形。
3.用示波器观察系统的全响应波形。
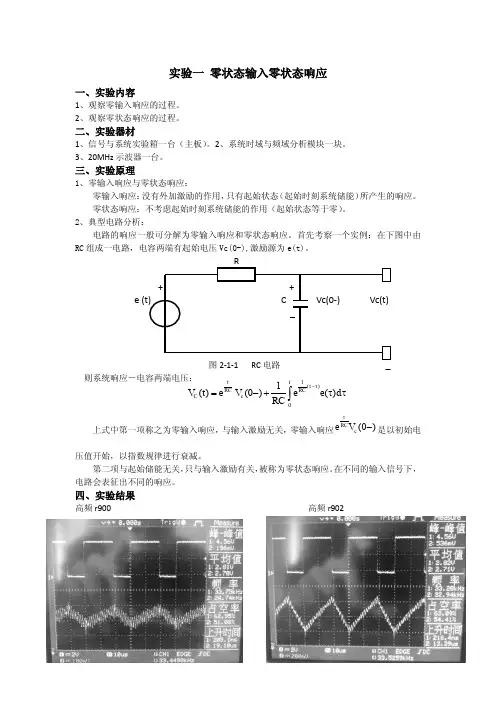
三、实验仪器1.信号与系统实验箱一台2.信号系统实验平台3.零输入响应与零状态响应模块(DYT3000-64)一块4.20MHz双踪示波器一台5.连接线若干四、实验原理系统的响应可分解为零输入响应和零状态响应。
首先考察一个实例:在图7-1中由RC 组成一阶RC系统,电容两端有起始电压Vc(0-),激励源为e(t)。
RVc(t)图7-1 一阶RC系统则系统的响应:1()01()(0)()tt t RCRCC c V t eV e e d RC -τ=-+ττ⎰ 上式中第一项称之为零输入响应,与输入激励无关,零输入响应(0)tRCc e -是以初始电压值开始,以指数规律进行衰减。
第二项与起始储能无关,只与输入激励有关,被称为零状态响应。
在不同的输入信号下,电路会表征出不同的响应。
系统的零输入响应与零状态响应电路原理图如图7-2所示。
实验中为了便于示波器观察,用周期方波作为激励信号,并且使RC 电路的时间常数略小于方波信号的半周期时间。
电容的充、放电过程分别对应一阶RC 系统的零状态响应和零输入响应,通过加法器后得到系统的全响应。
图7-2 零输入响应与零状态响应电路原理图五、实验步骤本实验使用信号源单元和零输入响应与零状态响应模块。
1. 熟悉零输入响应与零状态响应的工作原理。
接好电源线,将零输入响应与零状态响应模块插入信号系统实验平台插槽中,打开实验箱电源开关,通电检查模块灯亮,实验箱开始正常工作。
2. 系统的零状态响应特性观察:① 将信号源单元产生的f 0=1KHz 方波信号送入激励信号输入点SQU_IN 。
②调节电位计W201,用示波器观察一阶RC系统的零状态响应输出点ZeroState的波形。
零输入响应与零状态响应一、零输入响应1定义在没有外加激励时,仅有t = 0时刻的非零初始状态引起的响应。
取决于初始状态和电路特性,这种响应随时间按指数规律衰减。
2简介系统的零输入响应完全由系统本身的特性所决定,与系统的激励无关。
当系统是线性的,它的特性可以用线性微分方程表示时,零输入响应的形式是若干个指数函数之和。
指数函数的个数等于微分方程的阶数,也就是系统内部所含"独立"储能元件的个数。
假定系统的内部不含有电源,那么这种系统就被称为"无源系统"。
实际存在的无源系统的零输入响应随着时间的推移而逐渐地衰减为零。
零输入响应是系统微分方程齐次解的一部分。
3起始状态所谓的起始状态,是反映一个系统在初始观察时刻的储能状态。
以电系统为例,我们做如下约定:在研究t=0以后的响应时,把t=0(-)时的值uc(0-)和il(0-)等称为起始状态,而把t=0+时的值uc(0+)和il(0+)以及它们的各阶导数称为初始值或初始条件。
二、零状态响应1定义在动态电路中,动态元件的初始储能为零(即零初始状态)下,仅有电路的输入(激励)所引起的响应。
三、两种响应的区别零状态响应:0时刻以前响应为0(即初始状态为0),系统响应取决于从0时刻开始加入的信号f(t);零输入响应:从0时刻开始就没有信号输入(或说输入信号为0),响应取决于0时刻以前的初始储能。
四、两种响应的判断方法如果有电源激励就是,而元件本身没有电压或电流就是零状态,相反没有电源激励只有元件本身初始值电压电流,就是零输入响应。
五、两种响应的求解方法1零输入响应:就是没有外加激励,由初始储能产生的响应,它是齐次解的一部分;2零状态响应:就是初始状态为零,外加激励产生的响应。
它可以通过卷积积分来求解。
零状态响应等于单位样值相应和激励的卷积。
其中,单位样值相应就是系统函数的反拉式变换或z变换。
六、两种响应之间的联系引起电路响应的因素有两个方面,一是电路的激励,而是动态元件储存的初始能量。
零状态响应和零输入响应公式对于控制理论中的系统分析和设计,零状态响应和零输入响应是非常重要的概念。
它们是系统的两种不同响应方式,对于我们理解系统的行为和预测其未来运动是非常有帮助的。
一、什么是零状态响应?在系统中,当没有输入信号时,系统的初始状态被称为零状态。
在这种情况下的系统响应被称为零状态响应。
零状态响应是系统初始状态的响应,当外部信号(输入信号)为零时,系统的响应只依赖于系统在初始状态下的状态。
零状态响应通常用$y_{Z}(t)$表示。
对于某些系统,零状态响应很容易被确定。
例如,对于一个电路,我们可以将电路关闭并将它处于某个初始状态,然后再打开电路并查看其响应。
在这种情况下,零状态响应就是由系统内部元件和初始状态所定义的。
有时,系统的零状态响应可以由初始时间和初始状态以及系统的传递函数来计算出来。
在这种情况下,我们可以使用下面这个公式进行计算:$$y_{Z}(t) = h(t) * x_{Z}$$其中,$h(t)$代表系统的单位脉冲响应,可以通过系统的传递函数来计算得到;$x_{Z}$代表系统的初始状态。
因此,如果我们已知系统的传递函数和初始状态,我们可以使用这个公式来计算出零状态响应。
二、什么是零输入响应?当外部信号是零时,系统的响应依然存在,这样的响应被称为零输入响应。
例如,对于受到突然冲击的机械系统,即使没有任何外力作用,机械系统也会继续振动,这就是零输入响应。
零输入响应是仅仅由系统本身的特性所决定的响应,与外部信号无关。
零输入响应通常用$y_{I}(t)$表示。
对于某些系统,零输入响应很容易确定。
例如,对于一个谐振系统,它的零输入响应可以通过对自然频率进行计算得出。
在这种情况下,我们可以使用下面这个公式进行计算:$$y_{I}(t) = c_{1}e^{s_{1}t} + c_{2}e^{s_{2}t} + ... + c_{n}e^{s_{n}t}$$其中,$s_{1}, s_{2},...,s_{n}$是系统的本征值,$c_{1}, c_{2},...,c_{n}$是待定系数,可以通过设置初始条件来计算得出。
宁波工程学院信号与系统实验报告学院:电子与信息工程学院专业: 网络工程年级: 网络11-2实验时间:2013 年5 月22 日姓名:_____________ 学号:____________________________姓名:_____________ 学号:______________________指导教师签字:__________________ 成绩:________________________实验一零输入响应与零状态响应一、实验目的和要求1.掌握电路的零输入响应。
2.掌握电路的零状态响应。
3.学会电路的零状态响应与零输入响应的观察方法。
实验原理:1.零输入响应和零状态响应零输入响应:没有外加激励的作用,只有起始状态(起始时刻系统储能)所产生的响应。
零状态响应:不考虑起始时刻系统储能的作用(起始状态等于零)所产生的响应。
2•典型电路分析电路的响应一般可分解为零输入响应和零状态响应。
例如,在图1-1中由RC组成一电路,电容两端有起始电压V c ( 0-),激励源为e (t)。
则系统响应-电容两端电压:t 式(1-1 )中第一项称之为零输入响应, 与输入激励无关,零输入响应V c (t) = e —RC V C (0_)是 从初始电压值开始, 以指数规律进行衰减。
第二项与起始储能无关,只与输入激励有关,称 之为零状态响应。
在不同的输入信号下,电路会表现出不同的响应。
三、实验过程及数据记录1 •零输入和零状态的输出波形。
(其中输入波形为方波)系统的零输入响应特性:1) SK900位置置于900时2) SK900位置置于902时V c (t)1 RC 1 0 e W )e(. )d . (1-1 ) 2) SK900位置置于902时系统的零状态响应特性1) SK900位置置于900时 T12.通过绘制出的波形,和理论计算结果进行比较。
通过实验得到的波形与理论结果相比基本相同。
四思考题:1图1-1所示电路中,根据实验提供的实验元件,计算系统的零状态和零输入过程。
一阶电路的零输入响应和零状态响应下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!一阶电路的零输入响应和零状态响应在电路理论中,一阶电路是一种常见的电路结构,其具有简单的数学描述和易于理解的特点。
信号与系统课程设计报告书课题名称 零输入响应与零状态响应姓 名梁何磊学 号 20086354 院、系、部 电气系 专 业 电子信息工程 指导教师孙秀婷 康朝红※※※※※※※※※ ※ ※※ ※※ ※※※※※※※※※2008级信号与系统课程设计2011年1月11日连续时间系统的LTI 系统的时域仿真 -------零输入响应与零状态响应20086354 梁何磊一、设计目的掌握信号经过LTI 系统的时域分析方法。
巩固已经学过的知识,加深对知识的理解和应用,加强学科间的横向联系,学会应用MATLAB 对实际问题进行仿真。
学会对带有非零起始状态的LTI 系统进行仿真。
二、设计要求(1)根据实际问题建立系统的数学模型,对给定的如下电路,课本第二章例2-8,参数如图所示;建立系统的数学模型,并计算其完全响应;(2)用MATLAB 描述此系统;(3)仿真实现并绘制输出信号的波形。
要求用两种方法仿真实现完全响应。
对仿真结果进行比较,并与理论值比较。
三、设计方法与步骤:一般的连续时间系统分析有以下几个步骤: ①求解系统的零输入响应; ②求解系统的零状态响应; ③求解系统的全响应; ④分析系统的卷积;⑤画出它们的图形. 下面以具体的微分方程为例说明利用MATLAB 软件分析系统的具体方法.1.连续时间系统的零输入响应描述n 阶线性时不变(LTI )连续系统的微分方程为:已知y 及各阶导数的初始值为y(0),y (1)(0),… y (n-1)(0), 求系统的零输入响应。
建模当LIT 系统的输入为零时,其零输入响应为微分方程的其次解(即令微分方程的等号右端为零),其形式为(设特征根均为单根)1121111n n m n n m m n n m d y d y dy d u du a a a a y b b b u dtdt dt dt dt -++-++⋅⋅⋅⋅⋅++=+⋅⋅⋅⋅++1212()n p tp t p t n y t C e C e C e =++⋅⋅⋅⋅+()4=t e ()t L H 41=L Ω=232其中p 1,p 2,…,p n 是特征方程a 1λn +a 2λn-1+…+a n λ+a n =0的根,它们可以用root(a)语句求得。
各系数 由y 及其各阶导数的初始值来确定。
对此有………………………………………………………………………………………写成矩阵形式为: P 1n-1C 1+ P 2n-1C 2+…+ P n n-1C n =D n-1y 01012201111120111n n n n n n n C y p p p C Dy p p p C D y ----⋅⋅⋅⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⋅⋅⋅⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⋅⋅⋅⎣⎦⎣⎦⎣⎦即 V •C=Y 0 其解为:C=V\Y 0 式中V 为范德蒙矩阵,在matlab 的特殊矩阵库中有vander 。
以下面式子为例:)(6)('4)(3)('2)("t f t f t y t y t y -=++初始条件为2_)0(=y ,7_)0('=y ;MATLAB 程序:a=input('输入分母系数a=[a1,a2,...]='); n=length(a)-1;Y0=input('输入初始条件向量 Y0=[y0,Dy0,D2y0,...]='); p=roots(a);V=rot90(vander(p));c=V\Y0'; dt=input('dt=');te=input('te='); t=0:dt:te;y=zeros(1,length(t)); for k=1:n y=y+c(k)*exp(p(k)*t);end plot(t,y);gridxlabel('t') ;ylabel('y'); title('零输入响应'); 程序运行结果:用这个通用程序来解一个三阶系统,运行此程序并输入120n C C C y ++⋅⋅⋅⋅+=11220n n p C p C p C Dy ++⋅⋅⋅⋅+=111111220n n n n n n p C p C p C D y----++⋅⋅⋅⋅+=1211112111n n n n n p p p V p p p ---⋅⋅⋅⎡⎤⎢⎥⋅⋅⋅⎢⎥=⎢⎥⎢⎥⋅⋅⋅⎣⎦[]12n C C C C =⋅⋅⋅1000n C y Dy D y -⎡⎤=⋅⋅⋅⎣⎦a=[1,2,3] Y0=[2,7] dt=0.002 te=7结果如下图:根据图可以分析零输入响应,它的起始值与输入函数无关,只与它的初始状态值有关,其起始值等于y(0_)的值。
随着时间的推移,最后零输入响应的值无限的趋近于0。
2.连续时间系统零状态响应的数值计算我们知道,LTI 连续系统可用如下所示的线性常系数微分方程来描述,()()()()NMi j i j i j a y t b f t ===∑∑例如,对于以下方程:''''''''''''32103210()()()()()()()()a y t a y t a y t a y tb f t b f t b f t b f t +++=+++可用32103210[,,,],[,,,],a a a a a b b b b b ==输入函数()u f t =,得出它的冲激响应h ,再根据LTI 系统的零状态响应y (t )是激励u (t )与冲激响应h (t )的卷积积分。
注意,如果微分方程的左端或右端表达式中有缺项,则其向量a 或b 中的对应元素应为零,不能省略不写,否则出错。
求函数的零状态响应)(6)('4)(3)('2)("t f t f t y t y t y -=++及初始状态'(0)(0)0zs zs y y --==。
输入函数)*5cos()*2sin(t t y +=。
建模先求出系统的冲激响应,写出其特征方程 0322=++λλ求出其特征根为p 和p ,及相应的留数r ,r ;则冲激响应为1212()p t p th t r e r e =+输入y (t )可用输入u (t )与冲激响应h (t )的卷积求得。
MATLAB 程序:a=input('输入分母系数a=[a1,a2,...]='); b=input('输入输入信号系数b=[b1,b2,...]='); dt=input('dt=');te=input('te='); t=0:dt:te;u=input('输入函数u='); te=t(end);dt=te/(length(t)-1); [r,p,k]=residue(b,a);h=r(1)*exp(p(1)*t)+r(2)*exp(p(1)*t); subplot(2,1,1),plot(t,h);grid title('冲激函数'); y=conv(u,h)*dt; subplot(2,1,2),plot(t,y(1:length(t)));grid title('零状态响应'); 程序运行结果执行这个程序,取a=[1,2,3] b=[4,6] dt=0.001 te=7 得出图形如下:由于初始状态为零,所以零状态的起始值也为零,即h(t)包含了连续系统的固有特性,与系统的输入无关。
只要知道了系统的冲激响应,即可求得系统在不同输入时产生的输出。
因此,求解系统的冲激响应h 对进行连续时间系统的分析具有非常重要的意义3.连续时间系统的全响应计算上面通过对LTI 系统函数的描述,我们可以得知:如果在系统的初始状态不为零,在激励f (t )的作用下,LTI 系统的响应称为全响应,它是零输入响应和零状态响应之和,即()()()zi zs y t y t y t =+故可先求出零输入响应和零状态响应,再把两者相加,得到全响应。
但简单的相加可能由于零输入与零状态的矩阵不同而不能的出正确的结果,这就需要对矩阵进行截取,使它们的阶数相同。
例如,对于以下方程:yttfy++t=y-t4)('f)()(6)("t32)('初始值为:y(0_)=2, 7y;0('=_)输入函数为:)2t=y+sin(t*5*)cos(求它的全响应。
建模先根据零输入响应的求法,得出零输入响应y1(t)。
再根据零状态响应的求法,得出零状态响应y2(t)。
最后,全响应y等于零输入响应y1(t)加上零状态响应y2(t),得出全响应。
MATLAB程序:a=input('输入分母系数a=[a1,a2,...]=');n=length(a)-1;Y0=input('输入初始条件向量 Y0=[y0,Dy0,D2y0,...]=');b=input('输入输入信号系数b=[b1,b2,...]=');u=input('输入函数u=');dt=input('dt=');te=input('te=');t=0:dt:te;p=roots(a);V=rot90(vander(p));c=V\Y0';y1=zeros(1,length(t));for k=1:n y1=y1+c(k)*exp(p(k)*t);endte=t(end);dt=te/(length(t)-1);[r,p,k]=residue(b,a);h=r(1)*exp(p(1)*t)+r(2)*exp(p(1)*t);y2=conv(u,h)*dt;y=y1(1:length(t))+y2(1:length(t));figure(1);subplot(3,1,1),plot(t,y1),gridxlabel('t'); ylabel('y1');title('零输入响应');subplot(3,1,2),plot(t,y2(1:length(t)));gridxlabel('t');ylabel('y2');title('零状态响应');subplot(3,1,3),plot(t,y),gridxlabel('t'); ylabel('y');title('全响应响应');程序运行结果执行程序,取 a=[1,2,3] Y0=[2,7] b=[1,4,6]u=sin(2*t)+cos(5*t) dt=0.001 te=7结果如下图:在零输入响应中任一时刻取值y1,在零状态响应的对应时刻取值y2,再在全响应的对应时刻取值y。