工业机器人操作与编程-认识示教器
- 格式:pptx
- 大小:1.82 MB
- 文档页数:9
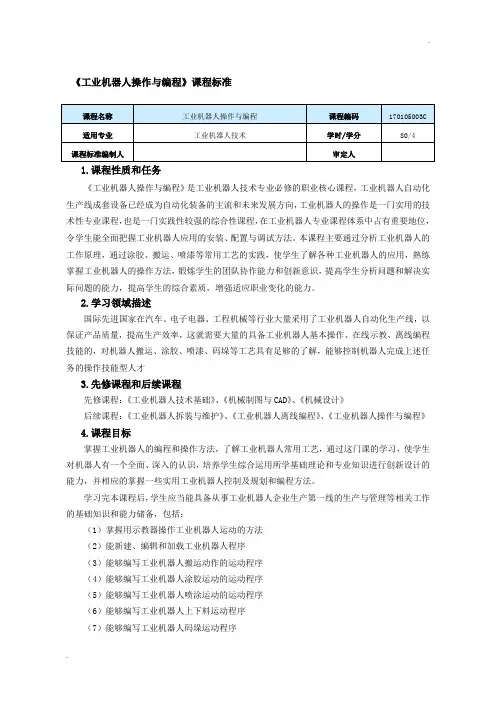
《工业机器人操作与编程》课程标准1.课程性质和任务《工业机器人操作与编程》是工业机器人技术专业必修的职业核心课程,工业机器人自动化生产线成套设备已经成为自动化装备的主流和未来发展方向,工业机器人的操作是一门实用的技术性专业课程,也是一门实践性较强的综合性课程,在工业机器人专业课程体系中占有重要地位,令学生能全面把握工业机器人应用的安装、配置与调试方法。
本课程主要通过分析工业机器人的工作原理,通过涂胶、搬运、喷漆等常用工艺的实践,使学生了解各种工业机器人的应用,熟练掌握工业机器人的操作方法,锻炼学生的团队协作能力和创新意识,提高学生分析问题和解决实际问题的能力,提高学生的综合素质,增强适应职业变化的能力。
2.学习领域描述国际先进国家在汽车、电子电器、工程机械等行业大量采用了工业机器人自动化生产线,以保证产品质量,提高生产效率,这就需要大量的具备工业机器人基本操作、在线示教、离线编程技能的,对机器人搬运、涂胶、喷漆、码垛等工艺具有足够的了解,能够控制机器人完成上述任务的操作技能型人才3.先修课程和后续课程先修课程:《工业机器人技术基础》、《机械制图与CAD》、《机械设计》后续课程:《工业机器人拆装与维护》、《工业机器人离线编程》、《工业机器人操作与编程》4.课程目标掌握工业机器人的编程和操作方法,了解工业机器人常用工艺,通过这门课的学习,使学生对机器人有一个全面、深入的认识,培养学生综合运用所学基础理论和专业知识进行创新设计的能力,并相应的掌握一些实用工业机器人控制及规划和编程方法。
学习完本课程后,学生应当能具备从事工业机器人企业生产第一线的生产与管理等相关工作的基础知识和能力储备,包括:(1)掌握用示教器操作工业机器人运动的方法(2)能新建、编辑和加载工业机器人程序(3)能够编写工业机器人搬运动作的运动程序(4)能够编写工业机器人涂胶运动的运动程序(5)能够编写工业机器人喷涂运动的运动程序(6)能够编写工业机器人上下料运动程序(7)能够编写工业机器人码垛运动程序5.课程内容和要求续上表6.相关说明6.1课程教学的组织与方法(1)总体原则:行动导向-工学结合、教学做一体化;(2)组织形式:项目教学、现场教学、以学生为中心学习;(3)教学方法:讲授法、引导课文法、示范法、角色扮演法、小组讨论法。


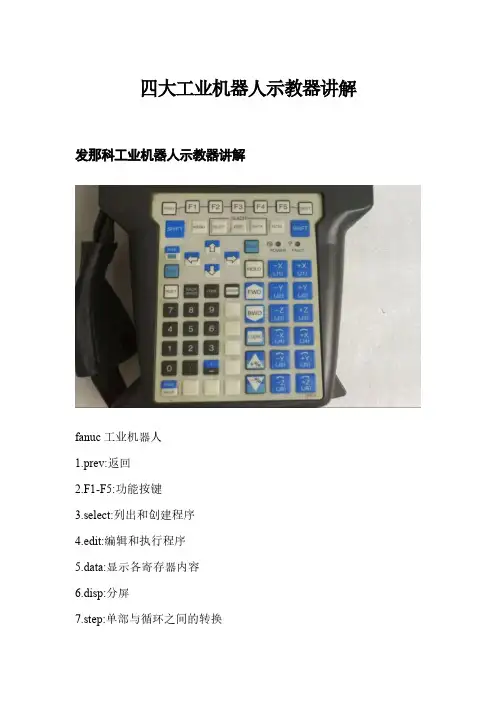
四大工业机器人示教器讲解发那科工业机器人示教器讲解
fanuc工业机器人
1.prev:返回
2.F1-F5:功能按键
3.select:列出和创建程序
4.edit:编辑和执行程序
5.data:显示各寄存器内容
6.disp:分屏
7.step:单部与循环之间的转换
8.reset:清除报警
9.back space清除光标之前的字符
10.item:选择它代表的项
11.enter:确认
12.diag:诊断
13.hold:暂停
14fwd自前向后运行程序
15.bwd自后向前运行程序
16.coord切换坐标系
17.group:组
ABB工业机器人示教器讲解
A 连接器
B 触摸屏
C 紧急停止按钮
D 控制摇杆
E USB端口
F 使能按钮
G 触摸笔
H 重置按钮
A-D 预设按键1-4,可用户自定义功能。
E 选择机械单元
F 切换运动模式,重定位或线性
G 切换运动模式,轴1-3或4-6
H 切换到增量模式
J step backward(步退)按钮
K Start(启动)按钮
L step Forward(步进)按钮
M Stop(停止)按钮。
工业机器人操作与编程认识示教器一、引言工业机器人是一种能够代替人类完成重复、繁琐或危险工作任务的自动化设备。
工业机器人不仅能够提高生产效率,减少人力成本,还能够提高产品质量和增强企业竞争力。
而为了能够高效地操作和编程工业机器人,需要使用示教器。
二、示教器的概念示教器是一种专门用于操作和编程机器人的设备。
它包括硬件和软件两个部分。
硬件部分主要包括示教器手柄、操作按钮、触摸屏等。
软件部分主要包括机器人操作系统、编程界面等。
示教器用于实现与机器人的交互操作和编程指令的输入。
三、示教器的操作1.连接示教器和机器人将示教器与机器人通过通信线缆进行连接。
连接方式主要有有线连接和无线连接两种。
在连接完成后,示教器即可与机器人进行通信。
2.示教器的操作按钮示教器上通常有各种操作按钮,如启动按钮、暂停按钮、停止按钮等。
通过按下这些按钮,可以控制机器人的启停和运动。
3.示教器的手柄示教器手柄是示教器的一个重要组成部分,用于操作机器人的运动。
手柄上通常有两个摇杆,分别用于控制机器人的位置和方向。
通过手柄的操作,可以实现机器人的直线运动、旋转运动等。
4.示教器的触摸屏四、示教器的编程示教器的编程主要采用图形化编程语言,如流程图或拖拽式编程。
通过图形界面,可以方便地拖拽编程块,设置参数,编写机器人的操作程序。
同时,示教器也支持文本编程语言,如C++、Python等。
示教器的编程步骤如下:1.创建工作流程首先,需要创建一个工作流程,用于描述机器人的操作步骤和流程。
2.添加编程块在工作流程中,添加各种编程块,如移动块、旋转块、抓取块等。
通过设置编程块的参数,可以实现机器人的具体动作。
3.设置编程块的参数对于每个编程块,需要设置相应的参数,如移动的距离、速度等。
通过调整这些参数,可以精确控制机器人的运动轨迹和速度。
4.编写机器人的操作程序在添加完编程块并设置好参数后,就可以编写机器人的操作程序了。
操作程序由多个编程块组成,按照顺序执行。

工业机器人操作与编程认识示教器示教器是工业机器人操作与编程的核心工具之一、它通常由两部分组成:示教工具和示教器控制台。
示教工具是用来操作机器人的手持设备,类似于遥控器,通过示教工具可以对机器人的动作、位置等进行控制。
示教器控制台用来将示教工具上的操作输入到机器人的控制系统中,并将其转化为机器人能够执行的指令。
示教器的操作方式主要有两种:在线示教和离线示教。
在线示教是指将示教工具与机器人直接连接,通过示教工具对机器人进行实时操作和编程。
离线示教是指将示教工具与机器人分开使用,通过示教工具对机器人的动作、位置等进行事先录制,并将其保存到示教工具中,然后再将录制的指令上传到机器人的控制系统中。
示教器的操作和编程过程中需要注意以下几个关键点:首先是机器人的基准点的设置。
基准点是机器人运动的参考点,一般是指机器人的起始位置或者一些固定位置。
在操作和编程之前,需要将机器人移动到基准点,并将其设置为机器人的原点。
其次是机器人的运动学参数的设置。
运动学参数是指机器人的关节角度、位置和速度等参数,通过设置这些参数可以对机器人的运动过程进行控制。
最后是机器人的路径规划和轨迹控制。
路径规划是指对机器人的运动路径进行规划,使其能够顺利地完成任务。
轨迹控制是指对机器人的运动轨迹进行控制,使其能够以指定的速度和加速度运动。
工业机器人操作与编程的示教器在工业生产中起着至关重要的作用。
通过示教器,工人可以对机器人进行灵活的操作和编程,使其能够完成各种复杂的任务。
示教器的使用也使得机器人的操作和编程变得更加简单和高效,提高了工业生产的效率和质量。
总结起来,工业机器人操作与编程的示教器是现代工业生产中不可或缺的工具。
它通过示教工具和示教器控制台的配合,实现对机器人的操作和编程。
示教器的操作方式主要有在线示教和离线示教,其中离线示教还可以分为点位示教和路径示教。
在操作和编程过程中需要注意设置机器人的基准点、运动学参数和路径规划等关键点。
《工业机器人操作与编程》课程标准1.课程性质和任务《工业机器人操作与编程》是工业机器人技术专业必修的职业核心课程,工业机器人自动化生产线成套设备已经成为自动化装备的主流和未来发展方向,工业机器人的操作是一门实用的技术性专业课程,也是一门实践性较强的综合性课程,在工业机器人专业课程体系中占有重要地位,令学生能全面把握工业机器人应用的安装、配置与调试方法。
本课程主要通过分析工业机器人的工作原理,通过涂胶、搬运、喷漆等常用工艺的实践,使学生了解各种工业机器人的应用,熟练掌握工业机器人的操作方法,锻炼学生的团队协作能力和创新意识,提高学生分析问题和解决实际问题的能力,提高学生的综合素质,增强适应职业变化的能力。
2.学习领域描述国际先进国家在汽车、电子电器、工程机械等行业大量采用了工业机器人自动化生产线,以保证产品质量,提高生产效率,这就需要大量的具备工业机器人基本操作、在线示教、离线编程技能的,对机器人搬运、涂胶、喷漆、码垛等工艺具有足够的了解,能够控制机器人完成上述任务的操作技能型人才3.先修课程和后续课程先修课程:《工业机器人技术基础》、《机械制图与CAD》、《机械设计》后续课程:《工业机器人拆装与维护》、《工业机器人离线编程》、《工业机器人操作与编程》4.课程目标掌握工业机器人的编程和操作方法,了解工业机器人常用工艺,通过这门课的学习,使学生对机器人有一个全面、深入的认识,培养学生综合运用所学基础理论和专业知识进行创新设计的能力,并相应的掌握一些实用工业机器人控制及规划和编程方法。
学习完本课程后,学生应当能具备从事工业机器人企业生产第一线的生产与管理等相关工作的基础知识和能力储备,包括:(1)掌握用示教器操作工业机器人运动的方法(2)能新建、编辑和加载工业机器人程序(3)能够编写工业机器人搬运动作的运动程序(4)能够编写工业机器人涂胶运动的运动程序(5)能够编写工业机器人喷涂运动的运动程序(6)能够编写工业机器人上下料运动程序(7)能够编写工业机器人码垛运动程序5.课程内容和要求续上表6.相关说明6.1课程教学的组织与方法(1)总体原则:行动导向-工学结合、教学做一体化;(2)组织形式:项目教学、现场教学、以学生为中心学习;(3)教学方法:讲授法、引导课文法、示范法、角色扮演法、小组讨论法。