工业机器人现场编程-示教器操作界面的功能与使用-课件
- 格式:pptx
- 大小:839.10 KB
- 文档页数:8

工业机器人应用一机器人示教单元使用1.示教单元的认识2.使用示教单元调整机器人姿势2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。
再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。
然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。
按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。
各轴对应动作方向好下图所示。
当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。
2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:直交调整模式TOOL调整模式三轴直交调整模式圆桶调整模式2.4在手动运行模式下按“HAND”进入手爪控制界面。
在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。
按键“+C”和“-C”对应“OUT-900”和“OUT-901”按键“+B”和“-B”对应“OUT-902”和“OUT-903”按键“+A”和“-A”对应“OUT-904”和“OUT-905”按键“+Z”和“-Z”对应“OUT-906”和“OUT-907”在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。
对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。
3.使用示教单元设置坐标点3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列:J1:0.00 J5:0.00J2: -90.00 J6:0.00J3:170.00J4:0.003.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。
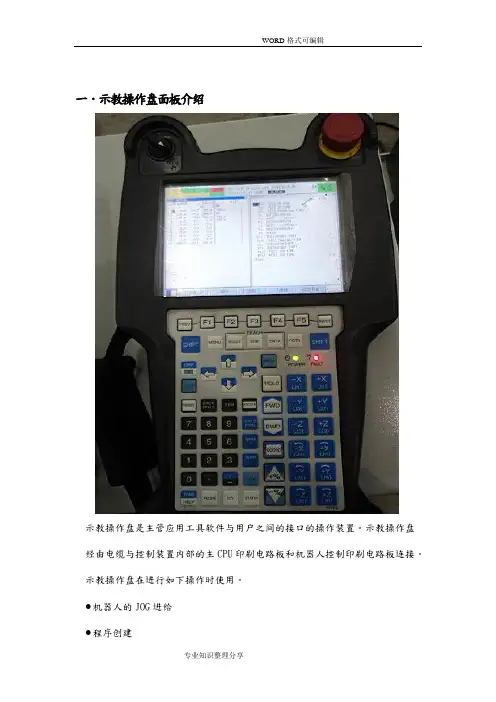
一.示教操作盘面板介绍示教操作盘是主管应用工具软件与用户之间的接口的操作装置。
示教操作盘经由电缆与控制装置内部的主CPU印刷电路板和机器人控制印刷电路板连接。
示教操作盘在进行如下操作时使用。
●机器人的JOG进给●程序创建●程序的测试执行●操作执行●状态确认示教操作盘由如下构件构成。
●横向40字符、纵向16行的液晶画面显示屏●61个键控开关●示教操作盘有效开关●Deadman开关●急停按钮1.示教操作盘有效开关在盘左上角,如右图所示:其将示教操作盘置于有效状态。
示教操作盘处在无效状态下,不能进行JOG进给、程序创建和测试执行等操作。
2.Deadman开关在盘背面,如右图所示两黄色键:示教操作盘处在有效状态下松开此开关时,机器人将进入急停状态。
3.急停按钮在盘右上角,如右图所示红色键:不管示教操作盘有效开关的状态如何,都会使执行中的程序停止,机器人伺服电源被切断,使得机器人进入急停状态。
示教操作盘的键控开关,由如下开关构成。
●与菜单相关的键控开关●与JOG相关的键控开关●与执行相关的键控开关●与编辑相关的键控开关1.与菜单相关的键控开关:1.)、、、、功能( F )键,用来选择液晶画面最下行的功能键菜单。
2.)翻页键将功能键菜单切换到下一页。
3.)、MENU(画面选择)键,按下,显示出画面菜单。
FCTN(辅助)键用来显示辅助菜单。
4.)、、、、、、、、SELECT(一览)键用来显示程序一览画面。
EDIT(编辑)键用来显示程序编辑画面。
DATA(数据)键用来显示寄存器等数据画面。
OTF键用来显示焊接微调整画面。
STATUS(状态显示)键用来显示状态画面。
I/O(输入/输出)键用来显示I/O画面。
POSN(位置显示)键用来显示当前位置画面。
DISP单独按下的情况下,移动操作对象画面。
在与SHIFT键同时按下的情况下,分割画面(1个画面、2个画面、3个画面、状态/1个画面)。
DIAG/HELP单独按下的情况下,移动到提示画面。