2.1认识ABB工业机器人示教器
- 格式:ppt
- 大小:2.78 MB
- 文档页数:18


ABB基础知识5:认识示教器华仔:致力于为学习ABB机器人与机器视觉的同道中人提供个人的经验,所写文章多为学习与兴趣所致,若有不足之处,还请读者多多包涵。
学习内容:1 示教器简介2 示教器结构3 示教器手持方法4 示教器画面结构5 示教器主菜单介绍1 示教器简介示教器(FlexPendant)是一种手持式操作员装置,用于执行与操作机器人系统有关的许多任务,如运行程序、手动操纵机器人移动、修改机器人程序等,也可用于备份与恢复、配置机器人、查看机器人系统信息等。
FlexPendant可在恶劣的工业环境下持续运作,其触摸屏易于清洁,且防水、防油、防溅湿。
2 示教器结构示教器的功能按键认识:3 示教器手持方法正确使用示教器时,右手持示教笔进行屏幕和按钮的操作,左手放在使能键上。
4.1.示教器主画面1.主菜单:显示机器人各个功能主菜单界面。
2.操作员窗口: 机器人与操作员交互界面,显示当前状态信息。
3.关闭按钮: 关闭当前窗口按钮。
4.快速设置菜单: 快速设置机器人功能界面,如速度、运行模式、增量等。
5.状态栏: 显示机器人当前状态,如工作模式、电机状态、报警信息等。
6.任务栏: 当前打开界面的任务列表,最多支持打开6个界面。
4.1 示教器主菜单1.用于对编写的程序中的点做一定的补偿。
2.用于查看并操作10信号。
3.用于查看并配置手动操作属性。
4.用于自动运行时显示程序画面。
5.用于对机器人进行编程调试。
6.用于查看并配置变量数据。
7.用于对系统数据进行备份和恢复。
8.用于对机器人机械零点进行校准。
9.用于对系统参数进行配置。
10.用于查看系统所有事件。
11.用于对系统资源、备份文件等进行管理。
12.用于查看系统控制器属性以及硬件和软件信息。
13.用于退出当前用户权限。
14.重新启动示教器。
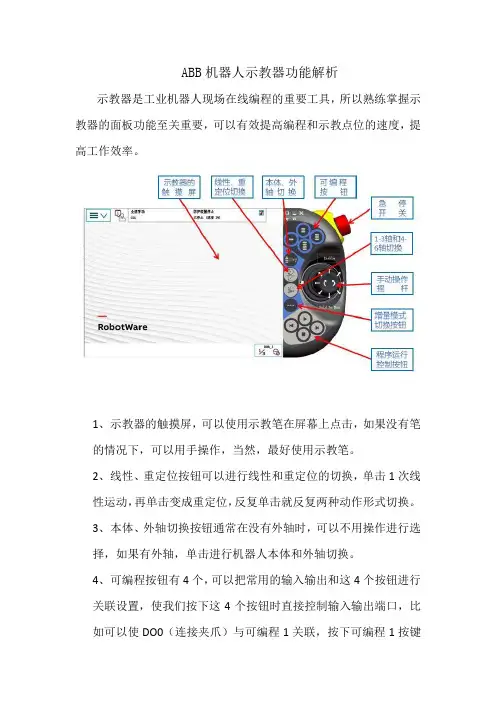
ABB机器人示教器功能解析
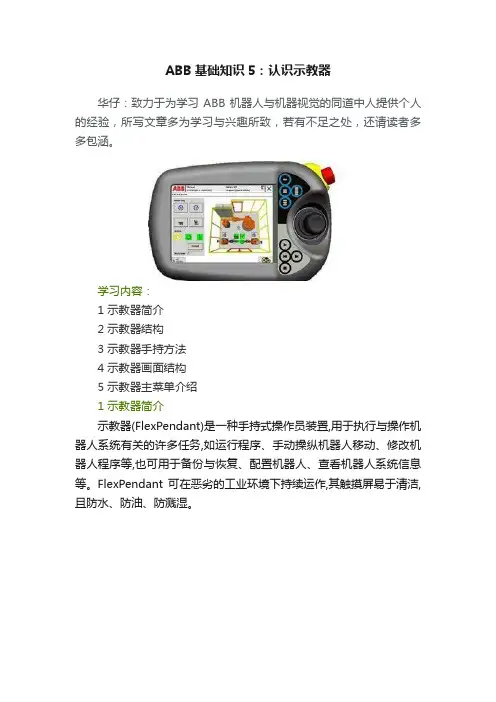
示教器是工业机器人现场在线编程的重要工具,所以熟练掌握示教器的面板功能至关重要,可以有效提高编程和示教点位的速度,提高工作效率。
1、示教器的触摸屏,可以使用示教笔在屏幕上点击,如果没有笔
的情况下,可以用手操作,当然,最好使用示教笔。
2、线性、重定位按钮可以进行线性和重定位的切换,单击1次线
性运动,再单击变成重定位,反复单击就反复两种动作形式切换。
3、本体、外轴切换按钮通常在没有外轴时,可以不用操作进行选
择,如果有外轴,单击进行机器人本体和外轴切换。
4、可编程按钮有4个,可以把常用的输入输出和这4个按钮进行
关联设置,使我们按下这4个按钮时直接控制输入输出端口,比如可以使DO0(连接夹爪)与可编程1关联,按下可编程1按键
时控制DO0从0变为1,或者从1变为0,即夹爪的夹紧或者松开。
5、在机器人自动运行时,急停开关可以在机器人出现危险状况时按下,使机器人运动马上停止,保证安全。
6、1-3轴和4-6轴切换按钮,按下时可以切换为1-3轴运动,再按下时切换为4-6轴运动。
7、摇杆操作主要控制机器人单轴运动、线性运动和重定位运动的方向和速度,在机器人示教点位过程中,熟练操作摇杆控制机器人至关重要。
8、增量模式选择开关是在机器人快要接近目标位置时使用,可以有效降低机器人的速度,避免初学者撞击,同样是按下时增量模式,再次按下取消增量模式。
9、程序运行控制按钮主要在调试程序时使用,有运行,停止,上一步,下一步4个按钮。
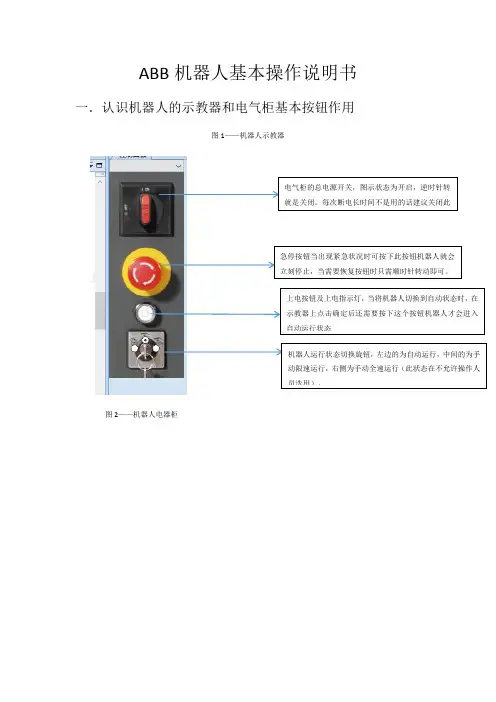
ABB机器人基本操作说明书一.认识机器人的示教器和电气柜基本按钮作用图1——机器人示教器图2——机器人电器柜图3——示教器上的使能按钮这个示教器侧面的使能按钮是在手动示教时需要机器人动作时要一直按住的。
它有三个档分别对应:不握住、适当力度握住、大力握住。
其中只有在适当力度握住时才会起作用,此时电器柜上的上电指示灯会常亮,否则会是闪烁状态。
图4——示教器的正确握法示教器界面上操作人员需要用到的几个按钮图5——示教器按钮界面右下角指示的含义线性增量开1-3轴增量开4-6轴增量开重定位增量开增量开增量关图6——示教器右下角图示如何选择工具坐标工件坐标1、打开手动操作界面如下2、点击坐标系3、选择要用的坐标点击确认如何调整增量大小和手动状态下的机器人速度1、点击下图箭头标记处2、点击箭头处设置增量大小3、点击箭头处进行手动运行速度设置如何进入想要调试的程序1、打开程序编辑器2、点击调试选择pp移至例行程序3、选择需要进入的程序然后确认机器人意外停止后如何回原点1、机器人打到手动状态。
2、打开增量选择合适的增量大小(建议选择中),再打开手动运行速度选项选择25%。
3、选择工具坐标按住示教器使能按钮用示教器旋钮控制机器人沿着刀具方向退到夹具外。
(时刻观察机器人运动方向,以免旋钮旋转反向机器人反向运动压坏模具或刀具)4、选择工件坐标用旋钮将机器人退到安全区域。
5、在示教器菜单界面选择程序编辑器。
6、点击调试选择PP移至例行程序,选择home()。
手握住示教器使能按钮待上电开关常亮点击示教器上自动运行按钮,等到机器人回到原点。
(时刻观察机器人是否与周围事物碰撞如果有立即松开示教器使能按钮,将机器人操作到安全区域再次运行home()程序。
)7、待故障排除后将机器人电器柜钥匙打到自动运行状态,示教器上点击确认后按下电器柜上上电开关即可。
焊接深度的调整1、找到需要调整的焊点,确认焊点是哪个模具的第几把刀加工第几个焊点。

ABB机器⼈⽰教器⼊门⼿动操作窗⼝⽰意图:步骤1、将机器⼈操作模式选择器置于⼿动限速模式。
步骤2、在ABB菜单中,单击⼿动操纵打开⼿动操纵窗⼝。
机械单元:步骤1、打开⼿动操纵窗⼝,并点击机械单元。
步骤2、在弹出的窗⼝中选择需要进⾏控制的机械单元,然后点击确定。
展开剩余90%运动模式:步骤1、打开⼿动操纵窗⼝,并点击动作模式。
步骤2、在弹出的窗⼝中选择所需模式,然后点击确定。
单轴运动Axis 1-3 轴 1-3机器⼈⼀、⼆、三每个转轴单独转动。
Axis 4-6 轴 4-6机器⼈四、五、六每个转轴单独转动。
单轴运动何时使⽤⽐较好呢?(1)将机械单元移出危险位置;(2)将机器⼈移出奇点;(3)定位机器⼈轴,以便进⾏校准。
注:机器⼈外轴运动必须为单轴运动;为了更精确校准,可使⽤微动控制。
重定位运动姿态运动:机器⼈TCP位置不变,机器⼈⼯具沿坐标轴转动,改变姿态。
注:重定位运动时,必须先选择⼯具坐标。
线性运动基坐标何时使⽤:当需要将可预测的运动轻⽽易举地转化为控制杆运动时,可以在基坐标系中进⾏微动控制。
在许多情况下,基坐标系是使⽤最为⽅便的⼀种坐标系,因为它对⼯具、⼯件或其它机械单元没有依赖性。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性;(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则⽆需执⾏此步骤;(4)按住使动装置,启动操纵器电机;(5)移动控制杆,机械单元将随之移动;线性运动⼤地坐标何时使⽤:例如:有两个机器⼈,⼀个安装于地⾯,⼀个倒置。
代表机器⼈的基坐标系也将上下颠倒。
如果在倒置机器⼈的基坐标系中进⾏微动控制,则很难预测移动情况。
此时可选择共享⼤地坐标系。
操作步骤(1)在ABB菜单中,点击微动控制,查看微动控制属性。
(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则⽆需执⾏此步骤。
(4)按住使动装置,启动操纵器电机。
(5)移动控制杆,机械单元将随之移动。