第3章 轴对称问题的有限元法
- 格式:pdf
- 大小:648.10 KB
- 文档页数:23
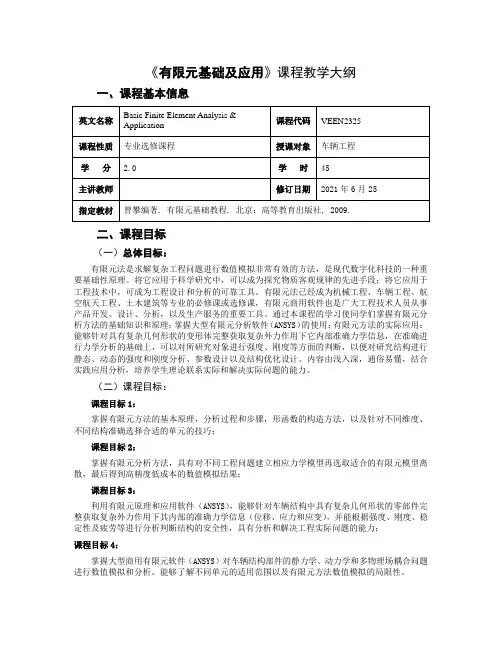
《有限元基础及应用》课程教学大纲一、课程基本信息二、课程目标(一)总体目标:有限元法是求解复杂工程问题进行数值模拟非常有效的方法,是现代数字化科技的一种重要基础性原理。
将它应用于科学研究中,可以成为探究物质客观规律的先进手段;将它应用于工程技术中,可成为工程设计和分析的可靠工具。
有限元法已经成为机械工程、车辆工程、航空航天工程、土木建筑等专业的必修课或选修课,有限元商用软件也是广大工程技术人员从事产品开发、设计、分析,以及生产服务的重要工具。
通过本课程的学习使同学们掌握有限元分析方法的基础知识和原理;掌握大型有限元分析软件(ANSYS)的使用;有限元方法的实际应用:能够针对具有复杂几何形状的变形体完整获取复杂外力作用下它内部准确力学信息,在准确进行力学分析的基础上,可以对所研究对象进行强度、刚度等方面的判断,以便对研究结构进行静态、动态的强度和刚度分析、参数设计以及结构优化设计。
内容由浅入深,通俗易懂,结合实践应用分析,培养学生理论联系实际和解决实际问题的能力。
(二)课程目标:课程目标1:掌握有限元方法的基本原理,分析过程和步骤,形函数的构造方法,以及针对不同维度、不同结构准确选择合适的单元的技巧;课程目标2:掌握有限元分析方法,具有对不同工程问题建立相应力学模型再选取适合的有限元模型离散,最后得到高精度低成本的数值模拟结果;课程目标3:利用有限元原理和应用软件(ANSYS),能够针对车辆结构中具有复杂几何形状的零部件完整获取复杂外力作用下其内部的准确力学信息(位移、应力和应变),并能根据强度、刚度、稳定性及疲劳等进行分析判断结构的安全性,具有分析和解决工程实际问题的能力;课程目标4:掌握大型商用有限元软件(ANSYS)对车辆结构部件的静力学、动力学和多物理场耦合问题进行数值模拟和分析。
能够了解不同单元的适用范围以及有限元方法数值模拟的局限性。
(三)课程目标与毕业要求、课程内容的对应关系本课程支撑专业培养计划中毕业要求1、2、3、5。

理论力学中的轴对称问题如何处理?在理论力学的广阔领域中,轴对称问题是一类具有重要意义和实际应用价值的研究对象。
轴对称问题常见于工程结构、机械设计以及许多物理现象的分析中。
理解和掌握如何处理这类问题,对于解决实际工程和科学中的力学难题至关重要。
首先,我们需要明确什么是轴对称问题。
简单来说,轴对称是指一个物体或系统绕着某一轴旋转一定角度后,与原来的形状完全重合。
在力学中,这意味着物体的几何形状、受力情况以及运动状态等在绕对称轴旋转时保持不变。
对于轴对称问题的处理,第一步通常是建立合适的坐标系。
由于轴对称的特性,选择柱坐标系往往是最为方便和直观的。
在柱坐标系中,我们有径向坐标 r、轴向坐标 z 和周向坐标φ 。
其中,周向坐标φ 在轴对称问题中通常不参与计算,因为物体在周向上的性质是相同的。
在确定了坐标系后,接下来就是对物体进行受力分析。
对于轴对称物体,其受力情况在绕对称轴旋转时也具有相应的对称性。
例如,如果受到的外力是集中力,那么这个力必然沿着对称轴或者在与对称轴垂直的平面内。
如果是分布力,比如压力、重力等,其分布规律也应该在轴对称的基础上进行考虑。
以一个简单的例子来说明,假设我们有一个轴对称的圆柱体,在其侧面受到均匀分布的压力。
在这种情况下,我们可以将这个分布压力等效为一个合力,这个合力的作用线必然通过圆柱体的轴线。
在处理轴对称问题时,运动学分析也是必不可少的环节。
对于旋转运动,我们需要考虑角速度、角加速度等参数。
由于轴对称的特点,角速度和角加速度在周向上的分量通常为零,只有轴向和径向的分量需要重点关注。
在动力学分析中,我们要运用牛顿第二定律来建立运动方程。
对于轴对称问题,由于受力和运动的对称性,方程往往会得到一定程度的简化。
例如,在考虑转动惯量时,由于轴对称性,只需要考虑轴向和径向的转动惯量分量。
材料力学性能在轴对称问题中也起着关键作用。
不同的材料在受力时的变形和应力分布规律不同。
对于常见的各向同性材料,其在轴对称条件下的应力应变关系可以通过相应的本构方程来描述。

思考题5-1 轴对称问题的定义答:工程中又一类结构,其几何形状、边界条件、所受载荷都对称于某一轴线,这种情况下结构再载荷作用下位移、应变和应力也对称于这个轴线,这种问题成为轴对称问题。
5-2 轴对称问题一般采用的坐标系?作图说明每个坐标分量的物理意义答:在描述轴对称弹性体问题的应力及变形时常采用圆柱坐标r,θ,z。
5-3 轴对称问题中每个点有几个位移分量?各位移分量是那几个自变量的函数?答:位移分量u, w,都只是rz的函数,与θ无关。
5-4 轴对称问题中的每个点有哪几个应力分量?是那几个自变量的函数。
答:4个应力分量;5-5 轴对称问题中的每个点有哪几个应变分量?是那几个自变量的函数答:4个应变分量5-6 轴对称问题是三维问题?二维问题?最简单的轴对称单元是哪种单元?作图说明答:由于轴对称,沿θ方向的环向(周向)位移v等于零。
因此轴对称问题是二维问题;三角形环单元。
(三角形轴对称单元,这些圆环单元与r z平面(子午面)正交的截面是三角形)5-7 写出三角形环单元的位移函数。
满足完备性要求吗?答:满足完备性要求。
5-8 三角形环单元形函数的表达式?指出形函数的性质。
5-9 三角形环单元的应力和应变的特点。
其单元刚度矩阵是几阶的?答:应力分量:剪应力为常量,其他3个正应力分量均随位置变化;应变分量:面内(子五面)3个应变分量为常量,环向应变不是常应变,而是与单元中各点的位置有关。
单元刚度矩阵为六阶。
5-10 有限元方法求解对称问题的基本步骤?1.结构离散化:对整个结构进行离散化,将其分割成若干个单元,单元间彼此通过节点相连;2.求出各单元的刚度矩阵[K](e):[K](e)是由单元节点位移量{Φ}(e)求单元节点力向量{F}(e)的转移矩阵,其关系式为:{F}(e)= [K](e) {Φ}(e);3.集成总体刚度矩阵[K]并写出总体平衡方程:总体刚度矩阵[K]是由整体节点位移向量{Φ}求整体节点力向量的转移矩阵,其关系式为{F}= [K] {Φ},此即为总体平衡方程。
初中数学轴对称知识点总结归纳轴对称是几何学中的一个重要概念,关于轴对称的知识在初中数学中有着广泛的应用。
下面是初中数学轴对称的知识点总结归纳。
一、轴对称的定义及性质轴对称即物体围绕条线旋转180度后仍然与原来位置重合。
1.定义:轴对称是指平面内的点、线、图形等围绕条线旋转180度后仍然与原来位置重合。
2.性质:a.旋转中心即轴对称的轴上的任意点保持不动。
b.旋转中心与轴对称的物体上的任意点之间的距离保持不变。
二、轴对称的判断判断一个图形是否轴对称的方法有以下几种:1.观察法:观察图形是否看起来关于条线对称。
2.折叠法:将图形沿着条疑似对称轴对折,观察是否能够将两部分完全重合。
3.旋转法:将图形围绕一个疑似对称轴旋转180度,观察是否与原来位置完全重合。
4.对称性质法:观察图形是否具有对称性质,例如左右对称、上下对称等。
三、轴对称的应用1.确定轴对称图形:a.线段的中点是线段轴对称的轴。
b.两个且只有两个端点在同一直线上的线段是轴对称的轴。
c.两条平行线是轴对称的轴。
d.三个且只有三个顶点都在同一直线上的三角形是轴对称的轴。
e.按顺时针方向给出的相邻边相等的凸多边形是轴对称的轴。
f.所有与自己相似的图形都是轴对称的轴。
2.轴对称图形的性质:a.轴对称图形是左右对称的,即图形的左半部分和右半部分完全一样。
b.轴对称图形的最小单位即轴上的点称为轴对称图形的旋转中心。
c.轴对称图形的每个点的两边都有另一个对称点。
d.轴对称图形上的点与旋转中心距离相等的点是该图形上的点与旋转中心的对称点。
3.构造轴对称图形:a.已知轴对称图形的一部分,可以使用对称性质构造其他部分。
b.可以将点在轴上折叠,或者将线段、角度在轴上旋转,得到图形的对称部分。
四、轴对称图形的操作1.旋转:将轴对称的物体沿着轴旋转180度,使得物体的每个点都与轴上的对称点相重合。
2.平移:将轴对称的物体沿着与轴垂直的平行线平移,使得物体与原来位置的对称关系保持不变。

第四章 轴对称问题有限元法在工程问题中经常会遇到一些实际结构,它们的几何形状、约束条件和外载荷均对称某一固定轴,我们把该固定轴称为对称轴。
则在载荷作用下产生的应力、应变和位移也都对称此轴。
这种问题就称为轴对称问题。
在离心机械、压力容器、矿山机械、飞行器中经常遇到轴对称问题。
第一节 轴对称问题弹性力学基本方程对于轴对称问题,宜采用圆柱坐标系(,,r z θ)。
如果将y弹性体的对称轴作为Z 轴,则所有应力、应变和位移分量都只是r 和Z 轴的函数,而与θ无关,即不随θ变化。
弹性体内任意一点只有两个位移:即沿r 方向的径向位移u 和沿Z 方向的轴向位移w 。
由于轴对称,沿θ方向的环向(周向)位移v 等于零。
因此轴对称问题是二维问题。
在轴对称弹性体内用相距dr 的两个圆柱面和过轴线互成d θ角的两个铅垂面切割出一个高为dz 的微元体,如图2所示。
(a )σ(b)沿r 方向作用的正应力r σ称为径向应力 沿θ方向作用的正应力θσ称为环向应力 沿z 方向作用的正应力z σ称为轴向应力 rz 面内的剪应力 zr τ=rz τ 故轴对称弹性体内任意一点的应力分量{}[]Tr z rz θσσσστ=对应的轴对称弹性体内任意一点的应变分量{}[]Tr z rz θεεεεγ=其中r ε ———-—- 沿r 方向径向线应变θε —----— 沿θ方向环向线应变 z ε ---—-- 沿z 方向轴向线应变rz γ-—---— rz 面内的剪应变与平面问题相比,轴对称问题多了一个环向应变θε。
弹性体受载时,点(,,r z θ)产生径向位移u ,使过点(,,r z θ)的周长增加了2()2r u r ππ+-,因而产生相对伸长,即环向应变:2()22r u r u r rθππεπ+-==轴对称问题的几何方程(应变与位移之间的关系)为,,,r z zr u u w w ur r z r zθεεεγ∂∂∂∂====+∂∂∂∂写成矩阵形式{}r z rz u r u rw z u w z r θεεεεγ⎧⎫⎪⎪⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪⎪⎪⎨⎬⎨⎬⎪⎪⎪⎪⎪⎪⎪⎪⎩⎭⎪⎪⎪⎪⎩⎭==∂∂∂∂∂∂+∂∂根据虎克定律,应力与应变的关系为1()r r z Eθεσμσσ⎡⎤⎣⎦=-+ 1()z r Eθθεσμσσ⎡⎤⎣⎦=-+ 1()z z r Eθεσμσσ⎡⎤⎣⎦=-+ 12(1)rz rz rz r G Eμττ+==由上式得[]10111011(1)(1)(12)101112002(1)r z zr r z rz E θθσσσστμμμμεμμεμμμμμεμμμμγμμ⎧⎫⎪⎪⎪⎪=⎨⎬⎪⎪⎪⎪⎩⎭⎡⎤⎢⎥--⎢⎥⎧⎫⎢⎥⎪⎪⎢⎥---⎪⎪⎢⎥⎨⎬+-⎢⎥⎪⎪⎢⎥⎪⎪--⎩⎭⎢⎥-⎢⎥⎢⎥-⎣⎦=(4—2)这里弹性矩阵[D]为[D ]=10111011(1)(1)(12)101112002(1)E μμμμμμμμμμμμμμμμμ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦-----+-----第二节 三角形截面环单元一、 结构离散化离散化轴对称体时,采用的单元是一些圆环。
3 轴对称问题弹性力学空间问题中的轴对称问题是指,物体的几何形状、约束情况及所受的外力都对称于空间的某一根轴,因此在物体中通过该轴的任何平面都是对称面,所有应力、应变和位移也对称于该轴,这类问题称为轴对称问题。
研究轴对称问题时通常采用圆柱坐标系(r,θ,z),以z轴为对称轴。
轴对称问题实例如图3.1所示的受均布内压作用的长圆筒,通过Z轴的一个纵截面就是对称面图3.1受均布内压作用的长圆筒3.1 三角形截面环单元三结点单元位移函数图4-2 三结点单元轴对称问题分析中所使用的三结点单元,在对称面上是三角形,在整个弹性体中是三棱圆环,各单元中圆环形铰相联接。
三角形截面环单元的结点位移在轴对称问题中,弹性体内任意一点上,不存在切向位移,只存在径向位移u 和轴向位移w ,两个位移分量表示为,⎭⎬⎫⎩⎨⎧=w u f }{[][]Tmm j j i iT mT jT iew u w u w u==δδδδ}{单元结点位移轴对称问题的三结点三角形单元位移函数取为,⎭⎬⎫++=++=z r z r u 654321w αααααα⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∆=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧m j i m jim j i m j i u u u c c c b b b a a a 21321ααα根据结点位移,可得:⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡∆=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧m j i m jim j i m j i w w w c c c b b b a a a 21654ααα单元形函数jm m j i r z z r a -=mmj ji iz r z r z r 11121=∆mj i z z b -=jm i r r c -=(i ,j ,m ))(21z c r b a N i i i i ++∆=单元内任一点的位移{}[]{}em jim m j j i i m jim j iN N N w u w u w u N N N N N N w u f δ=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧=00003.2 应变矩阵(几何矩阵)根据几何方程及单元内位移的表达式,可得:⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧∂∂+∂∂∂∂∂∂=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧r w z u z w ru r u zr z r γεεεθ应变矩阵)(21m m j j i i u b u b u b r u ++∆=∂∂)(21m m j j i i u f u f u f r u ++∆=rcz b r a f i i i ++=(下标轮换))(21m m j j i i w c w c w c z w ++∆=∂∂)(21m m j j i i u c u c u c z u ++∆=∂∂)(21m m j j i i w b w b w b r w ++∆=∂∂应变矩阵[]{}em ji m m mm m jj jj j ii ii i zr z r B B B b c c f b b c c f b b c c f b δγεεεθ=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡∆=⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧00000000021),,(00021][m j i b c c f b A B i i i iii ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=3.3 应力矩阵由轴对称问题的物理方程,得到弹性矩阵,⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡---------+-=)1(22100011101110111)21)(1()1(][μμμμμμμμμμμμμμμμμE D应力矩阵11A =-μμ2)1(221A =--μμ3)21)(1(4)1(A E=-+-μμμ令:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+-=21111110010101)21)(1()1(][A A A A AA A E D μμμ则弹性矩阵为:]][[][B D S =][][m j iS S S S =),,()(2]][[][2211113m j i b A c A c f b A c A f b A c A f b A B D S i ii i i i ii i i i i i ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+++∆==由弹性矩阵[D ]和几何矩阵[B ]可以得到应力矩阵[S ],由应力矩阵可知,除剪应力为常量,其它三个正应力分量都是r 、z 的函数。