第10章 弹性力学轴对称问题的有限元法简介
- 格式:ppt
- 大小:131.00 KB
- 文档页数:9
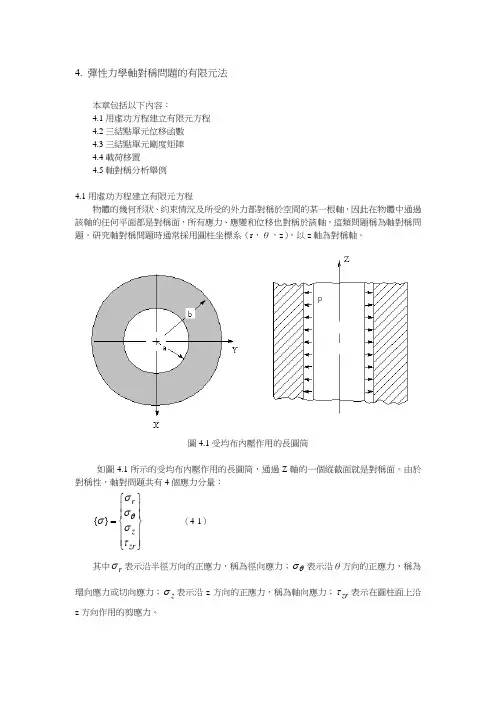
4. 彈性力學軸對稱問題的有限元法本章包括以下內容:4.1用虛功方程建立有限元方程 4.2三結點單元位移函數 4.3三結點單元剛度矩陣 4.4載荷移置4.5軸對稱分析舉例4.1用虛功方程建立有限元方程物體的幾何形狀、約束情況及所受的外力都對稱於空間的某一根軸,因此在物體中通過該軸的任何平面都是對稱面,所有應力、應變和位移也對稱於該軸,這類問題稱為軸對稱問題。
研究軸對稱問題時通常採用圓柱坐標系(r ,θ,z ),以z 軸為對稱軸。
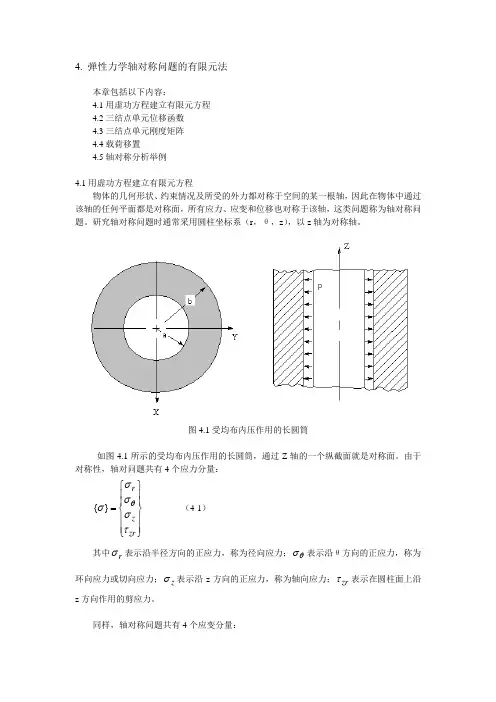
圖4.1受均布內壓作用的長圓筒如圖4.1所示的受均布內壓作用的長圓筒,通過Z 軸的一個縱截面就是對稱面。
由於對稱性,軸對問題共有4個應力分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zrz r τσσσσθ}{ (4-1)其中r σ表示沿半徑方向的正應力,稱為徑向應力;θσ表示沿θ方向的正應力,稱為環向應力或切向應力;z σ表示沿z 方向的正應力,稱為軸向應力;zr τ表示在圓柱面上沿z 方向作用的剪應力。
同樣,軸對稱問題共有4個應變分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zrz r γεεεεθ}{ (4-2)其中r ε表示沿半徑方向的正應變,稱為徑向正應變;θε表示沿θ方向的正應變,稱為環向正應變或切向正應變;z ε表示沿z 方向的正應變,稱為軸向正應變;zrγ表示沿r 和z方向的剪應變。
在軸對稱問題中,彈性體內任意一點上,不存在切向位移,只存在徑向位移u 和軸向位移w ,兩個位移分量表示為,⎭⎬⎫⎩⎨⎧=w u f }{(4-3)在討論彈性力學平面問題的有限元法時,我們先由將彈性體劃分為有限個單元的組合體,由虛功方程得到單元剛度矩陣,集成後得到整體剛度矩陣。
在這裏,我們用虛功方程直接得到軸對稱問題的有限元列式。
由虛功方程可得,外力虛功等於內力虛功或虛應變能, ds p f dxdydz F f dxdydz TsTT}{}{}{}{}{}{***⎰⎰⎰⎰⎰⎰⎰⎰+=σε(4-4)其中{F}為體力,{p}為面力。

第1节基本知识本节的有限元对象为轴对称问题,目的是学习将3D问题转化为2D问题分析的轴对称方法,涉及如何选取轴对称单元、建模规律、载荷的施加方法和后处理技术。
一、轴对称问题的定义轴对称问题是指受力体的几何形状、约束状态,以及其它外在因素都对称于某一根轴(过该轴的任一平面都是对称面)。
轴对称受力体的所有应力、应变和位移均对称于这根轴。
二、用ANSYS解决2D轴对称问题的规定用ANSYS解决2D轴对称问题时,轴对称模型必须在总体坐标系XOY平面的第一象限中创建,并且Y轴为轴旋转的对称轴。
求解时,施加自由约束、压力载荷、温度载荷和Y方向的加速度可以像其它非轴对称模型一样进行施加,但集中载荷有特殊的含义,它表示的是力或力矩在360°范围内的合力,即输入的是整个圆周上的总的载荷大小。
同理,在求解完毕后进行后处理时,轴对称模型输出的反作用力结果也是整个圆周上的合力输出,即力和力矩按总载荷大小输出。
在ANSYS中,X方向是径向,Z方向是环向,受力体承载后的环向位移为零,环向应力和应变不为零。
常用的2D轴对称单元类型和用途见表11-1。
表11-1 2D轴对称常用结构单元列表的高阶单的高阶单在利用ANSYS进行有限元分析时,将这些单元定义为新的单元后,设置单元配置项KEYOPT(3)为Axisymmetric(Shell51和Shell61单元本身就是轴对称单元,不用设置该项),单元将被指定按轴对称模型进行计算。
后处理时,可观察径向和环向应力,它对应的是SX与SZ应力分量,并且在直角坐标系下观察即可。
可以通过轴对称扩展设置将截面结果扩展成任意扇型区域大小的模型,以便更加真实地观察总体模型的各项结果。
轴对称问题有限元分析实例 2D节2第p=1000 N/mF2y611xO61211-1 圆柱筒壳示意图图——圆柱筒的静力分析一、案例1问题,直0.1 m1000 N/m的压力作用,其厚度为如图11-1所示,圆柱筒材质为A3钢,受,并且圆柱筒壳的下部轴线方向固定,其它方向自由,试计算其变形、mm,高度为16 径12径向应力和轴向应力。
4. 弹性力学轴对称问题的有限元法本章包括以下内容:4.1用虚功方程建立有限元方程 4.2三结点单元位移函数 4.3三结点单元刚度矩阵 4.4载荷移置4.5轴对称分析举例4.1用虚功方程建立有限元方程物体的几何形状、约束情况及所受的外力都对称于空间的某一根轴,因此在物体中通过该轴的任何平面都是对称面,所有应力、应变和位移也对称于该轴,这类问题称为轴对称问题。
研究轴对称问题时通常采用圆柱坐标系(r ,θ,z ),以z 轴为对称轴。
图4.1受均布内压作用的长圆筒如图4.1所示的受均布内压作用的长圆筒,通过Z 轴的一个纵截面就是对称面。
由于对称性,轴对问题共有4个应力分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zr z r τσσσσθ}{(4-1)其中r σ表示沿半径方向的正应力,称为径向应力;θσ表示沿θ方向的正应力,称为环向应力或切向应力;z σ表示沿z 方向的正应力,称为轴向应力;zr τ表示在圆柱面上沿z 方向作用的剪应力。
同样,轴对称问题共有4个应变分量:⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧=zr z r γεεεεθ}{(4-2)其中r ε表示沿半径方向的正应变,称为径向正应变;θε表示沿θ方向的正应变,称为环向正应变或切向正应变;z ε表示沿z 方向的正应变,称为轴向正应变;zr γ表示沿r 和z 方向的剪应变。
在轴对称问题中,弹性体内任意一点上,不存在切向位移,只存在径向位移u 和轴向位移w ,两个位移分量表示为,⎭⎬⎫⎩⎨⎧=w u f }{(4-3)在讨论弹性力学平面问题的有限元法时,我们先由将弹性体划分为有限个单元的组合体,由虚功方程得到单元刚度矩阵,集成后得到整体刚度矩阵。
在这里,我们用虚功方程直接得到轴对称问题的有限元列式。
由虚功方程可得,外力虚功等于内力虚功或虚应变能, ds p f dxdydz F f dxdydz T sT T }{}{}{}{}{}{***⎰⎰⎰⎰⎰⎰⎰⎰+=σε(4-4)其中{F}为体力,{p}为面力。
弹性力学及有限元分析1、 设试件两定点之间的长度为L 0,其截面积为F 0,加上拉力P 后,L 0 伸长了△L 。
我们把P/ F 0 称为拉伸应力(σ),△L/ L 0 称为拉伸应变(ε),于是有σ=P/ F 0 ,ε= △L/ L 0某种材料的拉伸应力和拉伸应变的比,称为该材料的杨氏模量或弹性模量(E),即 LF PL E ∆==00εσ,弹性模量E 表征了材料的物理性质。
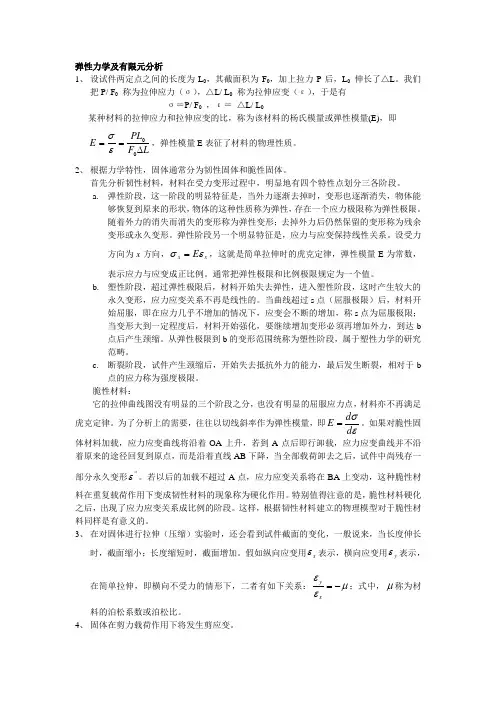
2、 根据力学特性,固体通常分为韧性固体和脆性固体。
首先分析韧性材料,材料在受力变形过程中,明显地有四个特性点划分三各阶段。
a. 弹性阶段,这一阶段的明显特征是,当外力逐渐去掉时,变形也逐渐消失,物体能够恢复到原来的形状,物体的这种性质称为弹性,存在一个应力极限称为弹性极限。
随着外力的消失而消失的变形称为弹性变形;去掉外力后仍然保留的变形称为残余变形或永久变形。
弹性阶段另一个明显特征是,应力与应变保持线性关系。
设受力方向为x 方向,x xE εσ=,这就是简单拉伸时的虎克定律,弹性模量E 为常数,表示应力与应变成正比例。
通常把弹性极限和比例极限规定为一个值。
b. 塑性阶段,超过弹性极限后,材料开始失去弹性,进入塑性阶段,这时产生较大的永久变形,应力应变关系不再是线性的。
当曲线超过s 点(屈服极限)后,材料开始屈服,即在应力几乎不增加的情况下,应变会不断的增加,称s 点为屈服极限;当变形大到一定程度后,材料开始强化,要继续增加变形必须再增加外力,到达b 点后产生颈缩。
从弹性极限到b 的变形范围统称为塑性阶段,属于塑性力学的研究范畴。
c. 断裂阶段,试件产生颈缩后,开始失去抵抗外力的能力,最后发生断裂,相对于b点的应力称为强度极限。
脆性材料:它的拉伸曲线图没有明显的三个阶段之分,也没有明显的屈服应力点,材料亦不再满足虎克定律。
为了分析上的需要,往往以切线斜率作为弹性模量,即εσd d E =。
如果对脆性固体材料加载,应力应变曲线将沿着OA 上升,若到A 点后即行卸载,应力应变曲线并不沿着原来的途径回复到原点,而是沿着直线AB 下降,当全部载荷卸去之后,试件中尚残存一部分永久变形''ε。
第四章 轴对称问题有限元法在工程问题中经常会遇到一些实际结构,它们的几何形状、约束条件和外载荷均对称某一固定轴,我们把该固定轴称为对称轴。
则在载荷作用下产生的应力、应变和位移也都对称此轴。
这种问题就称为轴对称问题。
在离心机械、压力容器、矿山机械、飞行器中经常遇到轴对称问题。
第一节 轴对称问题弹性力学基本方程对于轴对称问题,宜采用圆柱坐标系(,,r z θ)。
如果将y弹性体的对称轴作为Z 轴,则所有应力、应变和位移分量都只是r 和Z 轴的函数,而与θ无关,即不随θ变化。
弹性体内任意一点只有两个位移:即沿r 方向的径向位移u 和沿Z 方向的轴向位移w 。
由于轴对称,沿θ方向的环向(周向)位移v 等于零。
因此轴对称问题是二维问题。
在轴对称弹性体内用相距dr 的两个圆柱面和过轴线互成d θ角的两个铅垂面切割出一个高为dz 的微元体,如图2所示。
(a )σ(b)沿r 方向作用的正应力r σ称为径向应力 沿θ方向作用的正应力θσ称为环向应力 沿z 方向作用的正应力z σ称为轴向应力 rz 面内的剪应力 zr τ=rz τ 故轴对称弹性体内任意一点的应力分量{}[]Tr z rz θσσσστ=对应的轴对称弹性体内任意一点的应变分量{}[]Tr z rz θεεεεγ=其中r ε ———-—- 沿r 方向径向线应变θε —----— 沿θ方向环向线应变 z ε ---—-- 沿z 方向轴向线应变rz γ-—---— rz 面内的剪应变与平面问题相比,轴对称问题多了一个环向应变θε。
弹性体受载时,点(,,r z θ)产生径向位移u ,使过点(,,r z θ)的周长增加了2()2r u r ππ+-,因而产生相对伸长,即环向应变:2()22r u r u r rθππεπ+-==轴对称问题的几何方程(应变与位移之间的关系)为,,,r z zr u u w w ur r z r zθεεεγ∂∂∂∂====+∂∂∂∂写成矩阵形式{}r z rz u r u rw z u w z r θεεεεγ⎧⎫⎪⎪⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪⎪⎪⎨⎬⎨⎬⎪⎪⎪⎪⎪⎪⎪⎪⎩⎭⎪⎪⎪⎪⎩⎭==∂∂∂∂∂∂+∂∂根据虎克定律,应力与应变的关系为1()r r z Eθεσμσσ⎡⎤⎣⎦=-+ 1()z r Eθθεσμσσ⎡⎤⎣⎦=-+ 1()z z r Eθεσμσσ⎡⎤⎣⎦=-+ 12(1)rz rz rz r G Eμττ+==由上式得[]10111011(1)(1)(12)101112002(1)r z zr r z rz E θθσσσστμμμμεμμεμμμμμεμμμμγμμ⎧⎫⎪⎪⎪⎪=⎨⎬⎪⎪⎪⎪⎩⎭⎡⎤⎢⎥--⎢⎥⎧⎫⎢⎥⎪⎪⎢⎥---⎪⎪⎢⎥⎨⎬+-⎢⎥⎪⎪⎢⎥⎪⎪--⎩⎭⎢⎥-⎢⎥⎢⎥-⎣⎦=(4—2)这里弹性矩阵[D]为[D ]=10111011(1)(1)(12)101112002(1)E μμμμμμμμμμμμμμμμμ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦-----+-----第二节 三角形截面环单元一、 结构离散化离散化轴对称体时,采用的单元是一些圆环。
弹性力学中的有限元法FINITE ELEMENT METHOD同济大学土木工程学院第章第一章弹性力学与有限元弹性力学的任务弹性力学的求解体系弹性力学的解析求解实际科学和工程求解的需求有限单元法弹性力学的求解体系=任意弹性问15个()i i ij u u ,,,1+=ε0,+i j ij X σ题均应满足右边的控制j j j j 2ijij kk ij μεδλεσ2+=方程弹性力学问题的求解困难存在15个未知量,相应地建立了15个基本方程,好像已经完成了弹性力学的任务?!但是,进一步应用就会发现,时至今日,这15个微分方程组的求解在数学上的遇到困难也是非常巨大的。
在随后的100多年的时间里,数学、力学家们为了弹性力学的求解付出了艰苦的劳动和努力。
弹性力学问题的解析求解平面问题的应力函数解法:寻找一个满足双调和方程的应力函数U(亦称Airy应力函数)。
则其应力解答为该应力解答还必须满足应力及位移边界条件。
弹性力学问题的解析求解扭转问题的扭转函数解法:寻找满足泊松方程的扭转函数F(x,y),其应力解为其应力解还必须满足力的边界条件:弹性力学问题的解析求解空间轴对称问题的Love位移函数解法:寻找满足双调和方程的Love位移函数Ψ(r,z),其位移解为该位移解还必须满足边界条件薄板问题的挠曲函数解法:弹性力学问题的解析求解寻找一个满足双调和方程的挠曲函数w 。
则其应力解答为……该应力解答还必须满足应力及位移边界条件。
最小势能原理及近似解法最小势能原理:在满足位移边界条件(约束所允许的)一切位移中,真实的位移使弹性体的总势能取极值(极小值)。
近似解法:根据最小势能原理与弹性力学求解体系的等价性,可以提出弹性力学的近似解法求解微分方程求泛函的极值瑞利李兹近似解法瑞利-李兹近似解法选择一组满足位移边界条件的试探函数u (x ,y ,z ):将上述位移函数u (x ,y ,z )代入几何方程求出应变εij 、代入物理方程求出应力σij ,进而可以求得分析物体的总势能Π()m m m C B A f V U ,,=+=∏瑞利李兹近似解法瑞利-李兹近似解法利用最小势能原理,对总势能取极值:可以得到一组以Am 、Bm、Cm为未知系数的代数方程组。