第5章 平面问题和轴对称问题的有限元法
- 格式:ppt
- 大小:1.76 MB
- 文档页数:43

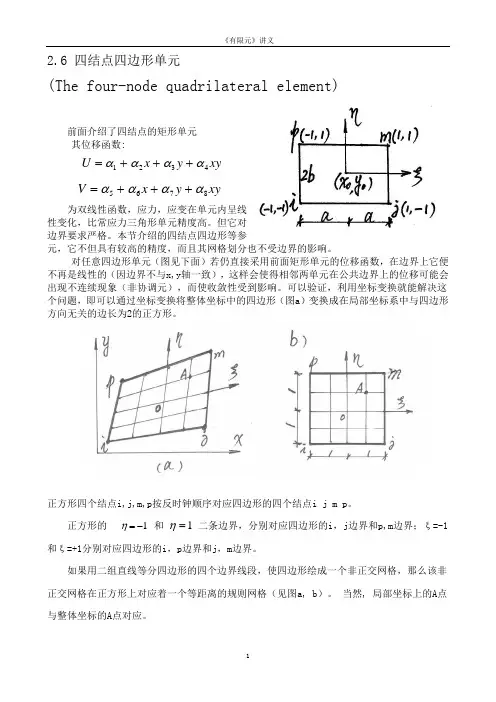
2.6 四结点四边形单元(The four-node quadrilateral element)前面介绍了四结点的矩形单元其位移函数:xy y x U 4321αααα+++=xy y x V8765αααα+++=为双线性函数,应力,应变在单元内呈线性变化,比常应力三角形单元精度高。
但它对边界要求严格。
本节介绍的四结点四边形等参元,它不但具有较高的精度,而且其网格划分也不受边界的影响。
对任意四边形单元(图见下面)若仍直接采用前面矩形单元的位移函数,在边界上它便不再是线性的(因边界不与x,y 轴一致),这样会使得相邻两单元在公共边界上的位移可能会出现不连续现象(非协调元),而使收敛性受到影响。
可以验证,利用坐标变换就能解决这个问题,即可以通过坐标变换将整体坐标中的四边形(图a )变换成在局部坐标系中与四边形方向无关的边长为2的正方形。
正方形四个结点i,j,m,p 按反时钟顺序对应四边形的四个结点i j m p 。
正方形的 1-=η 和 1=η 二条边界,分别对应四边形的i ,j 边界和p,m 边界;ξ=-1和ξ=+1分别对应四边形的i ,p 边界和j ,m 边界。
如果用二组直线等分四边形的四个边界线段,使四边形绘成一个非正交网格,那么该非正交网格在正方形上对应着一个等距离的规则网格(见图a, b )。
当然, 局部坐标上的A 点与整体坐标的A 点对应。
一、四结点四边形等参单元的形函数及坐标变换由于可以将整体坐标下的四边形单元变换成局部坐标下的正方形单元,对于这种正方形单元,自然仍取形函数为: ξηαηαξαα2321+++=U ξηαηαξαα8765+++=V引入边界条件,即可得位移函数:∑=ijmpi i U N Ui ijmpi V N V ∑==写成矩阵形式:{}{}[]{}ee p i p i ed N d N N N N V U f =⎥⎦⎤⎢⎣⎡=⎭⎬⎫⎩⎨⎧=000 式中形函数: ()()()ηηξξηξi i i N ++=1141, ()p m j i ,,, 按照等参元的定义,我们将坐标变换式亦取为: p p m m j j i i i ijmpi x N x N x N x N x N x +++==∑p p m m j j i i i ijmpi y N y N y N y N y N y +++==∑ ()162-- 式中形函数N 与位移函数中的完全一致。
《有限元理论及应用》课程教学大纲课程代码:010141035课程英文名称:Finite element theory and application课程总学时:24 讲课:24适用专业:机械设计制造及其自动化专业大纲编写(修订)时间:2010.7一、大纲使用说明(一)课程的地位及教学目标有限元法是机械设计制造及自动化专业本科(四年学制)的一门重要的专业基础课。
有限单元法是在当今技术科学发展和工程分析中获得最广泛应用的数值方法。
由于它的通用性和有效性,受到工程技术界的高度重视。
伴随着计算机科学和技术的快速发展,现已成为计算机辅助工程和数值仿真的重要组成部分。
本课程为学生讲述有限元法基本原理、基本方法及有限元法在各领域的应用。
通过本课的学习,使学生掌握有限元基本理论和方法,同时通过一些工程实例的研究,培养学生分析和解决工程问题的能力。
(二)知识、能力及技能方面的基本要求通过本课程的学习,学生要对本课的基本内容有系统的理解,掌握其基本概念、理论和方法,运用这些理论分析,解决工程实际问题,并达到如下要求:1.掌握有限元法的基本概念、理论及发展趋势。
2.具备建立简单机械工程问题有限元模型的能力。
3.能够应用有限元软件对简单机械结构和零部件进行分析和评价。
(三)实施说明1.本课程主要内容:弹性力学基础知识、平面三角形及轴对称单元,对其它单元要有一般性了解。
在教学过程中注意理论与工程实际的相结合,在讲清基本理论的基础上突出工程实际问题应用。
2.教学方法和教学手段:积极开展多媒体教学和实际工程案例教学,充分利用幻灯、投影仪、音像、CAI等现代化教学手段,将该领域的一些科研成果作为案例,在课堂上为学生演示。
以提高课堂效率和教学效果,激发学生的学习兴趣。
3.对学生的要求:基于学业规范的要求(道德行为规范、作业规范、实验规范等),学生应遵守《沈阳理工大学学生手册(本科生)》中的有关条例,上课时认真听讲,独立完成作业,努力做到不迟到、不早退。