模糊广义系统的静态输出反馈控制
- 格式:pdf
- 大小:168.55 KB
- 文档页数:4
Chp.1绪论基本要求(1)了解机械工程控制论的基本含义和研究对象,学习本课程的目的和任务;掌握广义系统动力学方程的含义。
(2)了解系统、广义系统的概念,了解系统的基本特性;了解系统动态模型和静态模型之间的关系。
(3)掌握反馈的含义,学会分析动态系统内信息流动的过程,掌握系统或过程中存在的反馈。
(4)了解广义系统的几种分类方法;掌握闭环控制系统的工作原理、组成;学会绘制控制系统的方框图。
(5)了解控制系统中基本名词和基本变量。
(6)了解正反馈、负反馈、内反馈、外反馈的概念。
(7)了解对控制系统的基本要求。
重点与难点本章重点(1)学会用系统论、信息论的观点分析广义系统的动态特性、信息流,理解信息反馈的含义及其作用。
(2)掌握控制系统的基本概念、基本变量、基本组成和工作原理;绘制控制系统方框图。
本章难点广义系统的信息反馈及控制系统方框图的绘制。
一、课程简介性质:机械设计制造及其自动化专业的一门技术基础课。
学时:32h先修课程:复变函数、机械动力学、交流电路理论后续课程:为专业基础和专业课打下一定基础。
如:机械工程测试技术、机电传动控制、数控机床等。
主要内容:本课程是数理基础课与专业课程之间的桥梁。
主要内容包括:控制理论的研究对象与任务、物理系统数学模型建立、时间响应分析、频率特性分析、系统的稳定性、系统的性能分析与校正、系统辩识、控制系统的计算机辅助分析.教材:杨叔子主编,《机械工程控制基础》,华中科技大学出版社,2004参考书目:(1)Katsuhiko Ogata.卢伯英等译,现代控制工程(第四版).北京:电子工业出版社,2003(2)李友善主编:《自动控制原理》,国防工业出版社,2003教材结构:1)对研究对象(机械工程)问题建立数学模型chp.22) 在一定输入下分析系统的输出:时间响应(时域分析)chp.3频率响应(频率分析)chp.43)系统性能分析:稳定性判据chp.54)系统校正:使系统全面满足性能指标要求chp.6二、对象与任务控制论+工程技术→工程控制论控制论+机械工程→机械工程控制研究对象:研究广义系统在一定外界条件下,从系统初始条件出发的整个动态过程,以及在这个历程中和历程结束后所表现出来的动态特性和静态特性。
伺服系统的反馈控制机制伺服系统是一种能够将电机驱动的输出信号与输入信号进行匹配的控制系统。
它可以将物理量如位置、速度、温度、压力等转换成电信号,并通过该信号来控制电机的旋转和转动。
在伺服系统中,反馈控制机制是至关重要的。
1. 反馈控制的基本概念反馈控制是一种广泛应用于控制系统中的控制方式,其核心思想是通过测量输出值并与期望值进行比较来调整系统的行为。
在伺服系统中,反馈控制机制能够通过对输出信号进行测量并与设定值进行比较,得出一个误差信号,再用它来控制电机的输入信号,以达到期望的输出。
2. 反馈控制机制的种类在伺服系统中,反馈控制机制通常有位置反馈、速度反馈和加速度反馈等多种形式。
(1)位置反馈:位置反馈是指通过测量输出值的位置信息来进行反馈控制的一种方式。
在伺服系统中,常见的位置反馈器件包括编码器、激光传感器等。
(2)速度反馈:速度反馈是指通过测量输出值的速度信息来进行反馈控制的方式。
在伺服系统中,通常采用霍尔传感器、变压器等设备来实现速度测量。
(3)加速度反馈:加速度反馈是指通过测量输出值的加速度信息来进行反馈控制的方式。
在伺服系统中,通常采用加速度传感器来实现加速度测量。
3. 反馈控制机制在伺服系统中的应用伺服系统中的反馈控制机制可以帮助控制系统更加稳定和准确地完成任务。
例如,在机器人控制系统中,位置反馈控制机制可以帮助机器人准确地抓取和放置物体;在成型机等生产设备中,速度反馈控制机制可以帮助提高精度和生产效率。
此外,反馈控制机制还可以帮助伺服系统实现闭环控制,即根据输出的电信号调整输入信号的值,以逐渐缩小误差,直至输出值与期望值相等,从而实现更加精细的控制。
4. 总结在工业自动化领域中,伺服系统被广泛应用于各种控制场景,如自动化机床、汽车制造、机器人等等。
其中,反馈控制机制作为伺服系统的核心部分,是实现快速、准确和稳定的控制的关键驱动力。
因此,在设计和应用伺服系统时,反馈控制机制的选择和优化非常重要。
模糊PID控制原理与设计步骤1.模糊化输入:将输入量通过模糊化过程,将其转化为隶属度函数形式,用来描述输入数量的各个级别或水平。
2.模糊化输出:同样地,将输出量也通过模糊化过程,转化为隶属度函数形式。
3.模糊化规则库:根据经验和专家知识,建立一组模糊规则,用来描述输入与输出之间的关系。
4.基于规则库的推理:根据输入的隶属度函数和规则库,通过隶属度的逻辑运算进行推理,得到输出的隶属度函数。
5.解模糊化:将输出的隶属度函数转化为具体的输出量,可以采用常用的解模糊化方法,如最大隶属度法、面积法等。
1.系统建模:首先需要对被控对象进行建模,得到其输入-输出关系。
可以基于部分局部建模或物理建模进行分析和确定。
2.设计模糊控制器的输入和输出:根据系统的特性和要求,确定模糊控制器的输入和输出。
- 输入通常包括误差(error)和误差的变化率(change in error)等。
-输出通常为控制量,可为模糊量或一阶量。
3.确定输入和输出的隶属度函数:确定输入和输出的隶属度函数形式,并根据实际情况进行参数调整。
通常可以选择三角形、梯形或高斯型函数等。
4. 设计模糊规则库:根据经验和专家知识,建立模糊规则库。
规则库的设计需要包括合理的覆盖边界和均匀的分布。
可以使用专家系统、模糊C-Means聚类等方法进行规则库的构建。
5.制定模糊推理机制:确定模糊推理的方法,常用的有最小最大法、剪切平均法等。
根据输入的隶属度函数和规则库,进行隶属度的逻辑运算和推理,得到输出的隶属度函数。
6.解模糊化:根据规则库,将模糊输出转化为具体的控制量。
可以采用最大隶属度法、面积法等方法进行解模糊化。
7.验证和调整:将设计好的模糊PID控制器应用到实际系统中,进行运行和调整。
根据实际反馈信号,对模糊规则库进行优化和调整,以提高控制系统的性能和稳定性。
总结:模糊PID控制是一种基于模糊逻辑和PID控制相结合的控制方法,能够更好地应对非线性、时变和模糊的控制系统。
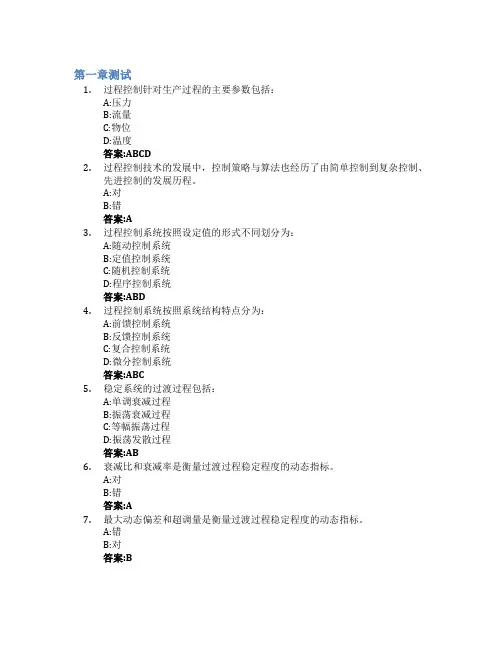
第一章测试1.过程控制针对生产过程的主要参数包括:A:压力B:流量C:物位D:温度答案:ABCD2.过程控制技术的发展中,控制策略与算法也经历了由简单控制到复杂控制、先进控制的发展历程。
A:对B:错答案:A3.过程控制系统按照设定值的形式不同划分为:A:随动控制系统B:定值控制系统C:随机控制系统D:程序控制系统答案:ABD4.过程控制系统按照系统结构特点分为:A:前馈控制系统B:反馈控制系统C:复合控制系统D:微分控制系统答案:ABC5.稳定系统的过渡过程包括:A:单调衰减过程B:振荡衰减过程C:等幅振荡过程D:振荡发散过程答案:AB6.衰减比和衰减率是衡量过渡过程稳定程度的动态指标。
A:对B:错答案:A7.最大动态偏差和超调量是衡量过渡过程稳定程度的动态指标。
A:错B:对答案:B8.偏差积分性能指标是系统阶跃响应的综合性能指标。
A:错B:对答案:B9.采用不同的偏差积分性能指标意味着对过渡过程评价的侧重点不同。
A:错B:对答案:B10.过程控制系统中性能指标要求越高越好。
A:对B:错答案:B第二章测试1.数字仪表的分辨率用来表征仪表的灵敏程度。
A:对B:错答案:A2.温度不能直接测量,只能间接测量,其测量方法可以归结为两类:A:接触式测量方法B:红外感应式测量方法C:膨胀式测量方法D:非接触式测量方法答案:AD3.热电偶使用时需要进行冷端温度补偿。
A:对B:错答案:A4.金属热电阻测温精度高,测温范围宽,在工业温度测量中得到了广泛应用。
A:对B:错答案:A5.弹性式压力计的测压敏感元件是:A:记录机构B:电气变换装置C:控制元件D:弹性元件答案:D6.差压式流量计是基于流体流动的节流原理,利用流体流经节流装置时产生的压力差而实现流量测量的。
A:错B:对答案:B7.电气式物位测量是利用敏感元件将物位的变化转换为电量参数的变化,通过测出电量的变化而得知物位的。
A:错B:对答案:B8.超声波液位计的测量精度不高,要提高其测量精度,必须采取措施消除声速变化的影响。
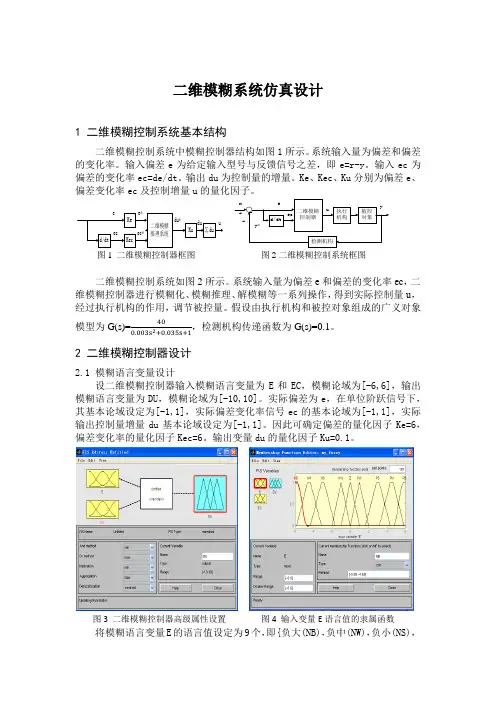
二维模糊系统仿真设计1 二维模糊控制系统基本结构二维模糊控制系统中模糊控制器结构如图1所示。
系统输入量为偏差和偏差的变化率。
输入偏差e为给定输入型号与反馈信号之差,即e=r-y。
输入ec为偏差的变化率ec=de/dt。
输出du为控制量的增量。
Ke、Kec、Ku分别为偏差e、偏差变化率ec及控制增量u的量化因子。
图1 二维模糊控制器框图图2二维模糊控制系统框图二维模糊控制系统如图2所示。
系统输入量为偏差e和偏差的变化率ec,二维模糊控制器进行模糊化、模糊推理、解模糊等一系列操作,得到实际控制量u,经过执行机构的作用,调节被控量。
假设由执行机构和被控对象组成的广义对象模型为G(s)=400.003s2+0.035s+1,检测机构传递函数为G(s)=0.1。
2 二维模糊控制器设计2.1 模糊语言变量设计设二维模糊控制器输入模糊语言变量为E和EC,模糊论域为[-6,6],输出模糊语言变量为DU,模糊论域为[-10,10]。
实际偏差为e,在单位阶跃信号下,其基本论域设定为[-1,1],实际偏差变化率信号ec的基本论域为[-1,1],实际输出控制量增量du基本论域设定为[-1,1]。
因此可确定偏差的量化因子Ke=6,偏差变化率的量化因子Kec=6。
输出变量du的量化因子Ku=0.1。
图3 二维模糊控制器高级属性设置图4 输入变量E语言值的隶属函数将模糊语言变量E的语言值设定为9个,即{负大(NB),负中(NW),负小(NS),负微(NW),零(Z),正微(PW),正小(PS),正中(PM),正大(PB)},偏差变化率的模糊语言变量EC 的语言值设定为7个,即{负大(NB),负中(NW),负小(NS),零(Z),正小(PS),正中(PM),正大(PB)}。
将输出语言变量DU 的语言值设定为9个,即{负大(NB),负中(NW),负小(NS),负微(NW),零(Z),正微(PW),正小(PS),正中(PM),正大(PB)}。
控制的原理控制的原理是指利用各种手段和方法,以确保系统能够按照既定的目标和要求进行有效运行的过程。
控制的原理涉及到了许多领域的学科知识,涵盖了自动化控制、信息工程、电子技术等方面。
下面将从控制原理的定义、分类、基本概念、常用方法以及控制系统的特点等方面进行详细阐述。
一、控制的定义及分类控制是一种对系统进行干预、改变和调节的技术,其目的是使系统的输出满足预定的要求和指标,以实现稳态和动态的良好控制效果。
控制的分类主要分为开环控制和闭环控制两种。
1、开环控制开环控制是指在控制过程中,仅对输入信号进行调节,不对输出信号进行测量和修正的一种控制方式。
这种控制方式的优点是结构简单,控制精度高。
但是由于其无法对外界干扰和内部变化作出实时反应,因此容易受到环境和工作条件的影响,不适用于要求较高的控制系统中。
二、控制系统的基本概念控制系统是由输入、处理、输出以及反馈四个基本部分组成的,其中输入和输出分别为控制系统的被控对象和控制结果,处理部分则是根据反馈信号进行控制计算的核心部分,反馈部分则是对系统输出进行监测和反馈调节的部分。
控制系统中最常见的术语包括控制器、传感器、执行器等。
1、控制器控制器是控制系统中实现控制计算和控制输出的重要部分,其基本功能是接受来自传感器的反馈信号,根据预设的控制算法和控制规律对控制对象进行控制,以实现对输出信号的调节和控制。
常见的控制器类型包括比例积分控制器、比例控制器、微处理机控制器等。
2、传感器传感器是控制系统中用于采集被控变量、参数等实时数据的装置,其基本功能是将采集到的实时信号转换成电信号,以供控制器进行控制计算和控制输出。
常见的传感器类型包括温度传感器、压力传感器、位移传感器、光电传感器等。
3、执行器执行器是控制系统中用于接受控制信号并对被控对象进行直接控制的装置,其基本功能是将控制器输出的电信号转换成机械作用力,对被控对象进行直接控制。
常见的执行器类型包括电机、阀门、气缸等。
模糊PID原理什么是PID控制器PID控制器是一种经典的反馈控制算法,被广泛应用于工业控制、自动化系统和机器人领域。
PID控制器利用被控对象的输出与期望参考值之间的偏差,通过计算比例、积分和微分三个分量的加权和来生成控制信号,从而使系统输出逐渐趋近于期望参考值。
PID控制器的三个分量分别表示了对系统当前状态的比例、积分和微分调节,即P (比例)、I(积分)和D(微分)。
比例控制项用来根据当前偏差来产生控制输出,积分控制项根据历史偏差累积来产生控制输出,微分控制项用来根据当前偏差的变化趋势来产生控制输出。
可以通过调节这三个分量的权重和参数来优化控制性能,达到使系统稳定、快速、精确响应的目的。
PID控制器的局限性PID控制器在很多应用场景中表现良好,但在某些特殊情况下,其控制性能可能会受到限制。
最主要的问题之一是PID控制器很难应对复杂的非线性、时变或不确定性系统。
此外,PID控制器对系统模型的依赖性较强,需要精确的系统模型来进行调参。
在现实世界中,很多工业过程都是非线性的,而传统的PID控制器对非线性系统的控制效果并不理想。
当被控对象存在不确定性或外部干扰时,PID控制器也容易出现较大的偏差。
因此,有必要对PID控制器进行改进以提高其控制性能。
模糊PID控制器的原理模糊PID控制器是在传统PID控制器的基础上引入了模糊控制理论的一种控制方法。
模糊控制理论是一种基于模糊集合理论的控制方法,它可以描述不确定的、模糊的和模糊规则的控制系统。
模糊控制器在传统的PID控制器中增加了一个模糊推理机制,以改善控制器对非线性、不确定性和时变系统的适应能力。
模糊PID控制器的主要原理是利用模糊规则来对系统进行控制。
首先,需要将输入和输出的模糊集合进行隶属度函数的定义,将模糊的、非精确的输入输出转化为数值。
然后,通过定义一组模糊规则,将模糊的输入映射到模糊的输出。
最后,根据模糊规则和当前输入的隶属度,计算模糊输出的隶属度,并通过一定的逻辑运算将隶属度转换为实际控制量。
扇形区域极点配置静态输出反馈可靠控制徐艺超;王福忠【摘要】Considering the continuous fault model in a linear system,we propose problem of a static output feedback reliable control of pole placement with actor faults in sector region. First,we study the system without any faults . We can get a feedback reliable controller ,the poles in the sector region ,but the controller will lose efficacy with the system with actor faults. Then under the actor faults,use the theory of Lyapunoy deduced the sufficient condition that make all the poles still in the same sector region . A static output feedback reliable con-troller can be obtained by using linear matrix inequality. A simulation example is given to illustrate the feasibility and effectiveness of the results.%针对线性系统,考虑连续增益故障模型,研究了具有执行器故障的扇形区域极点配置的静态输出反馈可靠控制问题。
首先,在执行器无故障的前提下,给出使极点能够配置在扇形区域内的充分条件,进而得出系统的静态输出反馈可靠控制率。
机械工程控制基础学习辅导与题解(修订版)第1章绪论内容提要1.1 机械工程控制论的研究对象与任务1.1.1 系统及广义系统系统是由相互联系、相互作用的若干部分构成,且具有一定运动规律的一个有机整体。
系统各元素之间存在着非常紧密的联系,而且,系统与外界也存在一定的联系。
系统及其与外界的关系如图1.1-1所示,其中.输入是指外界对系统的作用,输出是指系统对外界的作用。
系统可大可小可繁可简,甚至可“实”可“虚”,完全由研究的需要而定,因而将它们统称为为广义系统。
图1.l-l 系统及其与外界的联系1.1.2 机械工程控制论的研究对象机械工程控制论实质上足研究机械工程技术中广义系统的动力学问题。
具体地说,它研究机械工程广义系统在一定的外界条件(即输入或激励、干扰)作用下,从系统的一定的初始状态出发,所经历的由其内部的固有特性(即由系统的结构与参数所决定的特性)所决定的整个动态历程,研究这一系统与其输入、输出三者之间的动态关系。
1.1.3 机械工程控制论的研究任务从系统、输入、输出三者之间的关系出发,根据已知条件与求解问题的不同,机械工程控制论的任务可以分为以下五方面:(1)已知系统和输入,求系统的输出,即系统分析问题;(2)已知系统和系统的理想输出,设计输入,即最优控制问题;(3)已知输入和理想输出,设计系统,即最优设计问题;(4)已知输出,确定系统,以识别输入或输入中的有关信息.此即滤波与预测问题;(5)已知系统的输^和输出,求系统的结构与参数即系统辨识问题。
1.2 系统及其模型1.2.1 系统的特性(1)系统的性能不仅与构成系统的元素有关,而且还与系统的结构有关;(2)系统具有层次性;(3)系统的内容比组成系统各元素的内容要丰富得多;(4)系统是运动的,具有~定的动态特性。
1.2.2 机械系统以实现一定的机械运动、输出一定的机械能,以及承受一定的机械载荷为目的的系统称为机械系统。
对于机械系统,其输入和输出分别称为“激励”和“响应”。
自动控制原理反馈的原理
自动控制原理中的反馈原理是指将系统的输出作为输入的一部分,通过对输出进行测量和比较,然后根据比较结果对系统的输入进行调整以达到所需的输出。
反馈原理的基本思想是在系统中引入一个反馈回路,通过比较系统的输出与期望输出,计算得到误差信号,再根据该误差信号对系统的控制输入进行修正,以使系统输出逐渐接近期望输出,并实现系统的自动调节。
反馈原理的主要作用是提供系统的稳定性和鲁棒性,使系统具有抗干扰能力、自适应能力和优化特性。
通过反馈原理,系统可以根据实际输出来不断修正输入,使系统的动态性能更好、稳定性更强,能够适应环境变化和干扰的影响。
在控制系统中,反馈原理常常用于实现闭环控制,通过不断地测量输出、计算误差并调整控制输入,使系统的输出逐渐稳定在期望值附近。
同时,反馈原理也可以用于系统故障检测和故障处理,通过对输出的监测和比较,及时发现系统性能下降或出现异常状况,并采取相应的措施进行处理。
总之,反馈原理在自动控制原理中起着重要的作用,通过对系统输出进行测量和比较,根据比较结果对系统的输入进行修正,使系统的输出逐渐接近期望值,从而实现系统的自动调节和优化。