输出反馈
- 格式:ppt
- 大小:278.50 KB
- 文档页数:29
河南工业大学《现代控制理论》实验报告专业: 自动化 班级: F1203 姓名: 蔡申申 学号:201223910625完成日期:2015年1月9日 成绩评定:一、实验题目:状态反馈控制器设计二、实验目的1. 掌握状态反馈和输出反馈的概念及性质。
2. 掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3. 掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
三、实验过程及结果1. 已知系统u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=111100020003.[]x y 3333.02667.04.0= (1)求解系统的零点、极点和传递函数,并判断系统的能控性和能观测性。
A=[-3 0 0;0 2 0;0 0 -1];B=[1;1;1];C=[0.4 0.266 0.3333];[z p k]=ss2zp(A,B,C,0)系统的零极点:z =1.0017-1.9997p =-3-12k =0.9993[num den]=ss2tf(A,B,C,0)num =0 0.9993 0.9973 -2.0018den =1 2 -5 -6系统的传递函数:G1=tf(num,den)G1 =0.9993 s^2 + 0.9973 s - 2.002-----------------------------s^3 + 2 s^2 - 5 s - 6Continuous-time transfer function.Uc=ctrb(A,B); rank(Uc)ans =3满秩,系统是能控的。
Vo=obsv(A,C); rank(Vo)ans =3满秩,系统是能观的。
(2)分别选取K=[0 3 0],K=[1 3 2],K=[0 16 /3 –1/3](实验中只选取其中一个K为例)为状态反馈矩阵,求解闭环系统的零点、极点和传递函数,判断闭环系统的能控性和能观测性。
输入输出模块报反馈的解决方法-概述说明以及解释1.引言1.1 概述概述:输入输出模块在计算机系统中起到了至关重要的作用,它们负责与外部设备之间进行数据交互,实现信息的输入和输出。
然而,在使用过程中,输入输出模块报反馈的问题常常会给我们的工作和生活带来一定的麻烦。
为了解决这些问题,本文将针对输入模块和输出模块分别进行详细的分析和探讨,并提出解决方法。
在实际应用中,输入模块可能会出现无法正常识别或读取外部设备数据的问题,导致系统无法准确获取用户输入的信息。
另一方面,输出模块可能会出现无法正确显示或传输数据的问题,导致外部设备无法正常输出所需的信息。
这些问题的出现,不仅会影响系统的正常运行,还可能导致数据错误、信息传输中断等不可预料的情况发生。
为了解决输入模块报反馈的问题,我们可以从多个方面入手。
首先,我们可以检查输入设备的连接是否良好,并确保其与计算机系统的兼容性。
其次,我们可以对输入模块进行适当的设置和配置,以确保其能够正确地读取和识别外部设备的数据。
此外,我们还可以使用一些输入模块自带的故障诊断工具,来帮助我们快速定位和解决问题。
对于输出模块报反馈的问题,我们也可以采取类似的解决方法。
首先,我们可以检查输出设备的连接是否稳定,并确认其与计算机系统之间的通信是否正常。
其次,我们可以对输出模块进行相应的设置和配置,以确保其能够正确地传输和显示所需的数据。
此外,我们还可以尝试更新输出模块的驱动程序,以修复可能存在的兼容性问题,提高系统的稳定性和可靠性。
综上所述,解决输入输出模块报反馈的问题,需要我们仔细分析和研究其中的原因,并根据实际情况采取相应的解决方法。
通过优化调整输入输出模块的设置和配置,以及保证设备连接的稳定性和兼容性,我们能够有效地解决这些问题,提高系统的性能和可靠性,为用户提供更好的使用体验。
1.2文章结构文章结构部分的内容可以写成如下形式:文章结构本文主要围绕输入输出模块报反馈的问题展开讨论,并提出解决的方法。
反馈电路的四种反馈类型电子反馈电路是一种重要的电子电路,它主要研究反馈在电子系统中的作用,以达到所需的控制目的。
反馈电路的功能是控制系统的输出,并使其与系统的输入之间能够保持某种特定的关系。
它主要是通过电控系统的输出,来控制系统的输入,以实现所设定的控制目标。
反馈电路的四种反馈类型包括:线性反馈、非线性反馈、模拟反馈和可编程反馈。
首先是线性反馈。
线性反馈是一种有效的反馈方式,它通过利用反馈信号与输入信号之间的相关性来提高系统的输出,从而达到控制目的。
它是一种简单的反馈方式,可以提高系统的精确度和稳定性,但是由于反馈信号与输入信号之间的相关性有限,所以它不能实现太复杂的控制目标。
接下来是非线性反馈。
非线性反馈是一种更加灵活的反馈方式,它不仅可以提高系统的精确度,而且可以实现更复杂的控制目标。
它可以通过对反馈信号进行更精细的控制来实现更复杂的控制目标,同时还可以有效减少系统的噪声干扰。
第三种是模拟反馈。
模拟反馈是一种类似于线性反馈的反馈方式,但它具有更多的灵活性。
它可以利用互补的数字计算机技术,实现复杂的控制目标。
通过使用模拟反馈,可以使电子系统能够更加精确地控制变量,从而使得控制更准确。
最后是可编程反馈。
可编程反馈是一种将控制系统变量写入指定存储单元中的反馈方式,从而实现复杂的控制方案。
它是一种高度可编程的反馈方式,具有灵活性和可调性。
可以根据系统的特点、性能要求等因素来设计可编程反馈,从而使得整个系统的控制更加精确和可靠。
以上就是反馈电路的四种反馈类型,它们为电子系统的设计和控制提供了有效的解决方案,并且可以满足不同程度的控制要求。
在选择反馈系统时,应根据系统设计的要求和性能要求,来选择最合适的反馈类型。
仅仅依靠反馈线是不够的,而是要充分考虑各种因素,以便取得更好的控制效果。
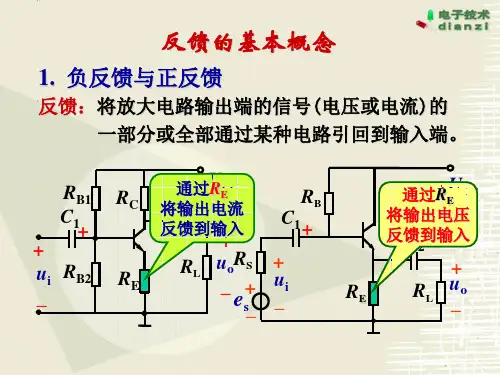
反馈的基本概念和一般表达式一、反馈的基本概念 反馈是指把放大电路输出回路中某个电量(电压或电流)的一部分或全部,通过一定的电路形式(反馈网络)送回到放大电路的输入回路,并同输入信号一起参与控制作用,以使放大电路某些性能获得改善的过程。
这一过程可用图Z0301 所示方框图来表示。
引入反馈后的放大电路称为反馈放大电路。
实际上,反馈的概念在第二章中讨论静态工作点稳定的电路时已经运用过了。
在分压式电流负反馈偏置电路中,通过射极电阻Re,将输出回路中的直流电流IE以UE = IERe的形式回送到了输入回路,使三极管发射结两端的电压UBE = UB - IERe ,受到输出电流的影响,从而使输出电流趋于稳定。
这种输出电量影响输入电量的方式就是反馈。
不过这里的反馈仅仅是直流电量的反馈(交流量被Ce旁路),称为直流反馈。
直流反馈主要用于稳定静态工作点。
如果将Ce去掉,这时输出回路中的交流信号也将反馈到输入回路,并使放大电路的性能发生一系列的改变,这种交流信号的反馈称为交流反馈,实际放大电路中,一般同时存在直流反馈和交流反馈,本单元主要讨论交流反馈对放大电路性能的影响。
二、反馈的极性 按照反馈对放大电路性能影响的效果,可将反馈分为正反馈和负反馈两种极性。
凡引人反馈后,反馈到放大电路输入回路的信号(称为反馈信号用表示)与外加激励信号(用表示)比较的结果、使得放大电路的有效输入信号(也称净输入信号,用表示)削弱,即<,从而使放大倍数降低,这种反馈称为负反馈。
凡引入反馈后,比较结果使>,从而使放大倍数提高,这种反馈称为正反馈。
正反馈虽能提高放大倍数,但同时也加剧了放大电路性能的不稳定性,主要用于振荡电路(将在08知识单元中讨论);负反馈虽降低了放大倍数,但却换来了放大电路性能的改善,是本单元讨论的重点。
不同极性的反馈对放大电路性能的影响截然不同,因此,在分析具体反馈电路时,首先必需正确地判断出电路中反馈的极性。
电路中的反馈分类电路中的反馈分类1. 电压负反馈电压负反馈是指从放大器输出端取出输出信号电压的一部分(或全部)作为负反馈信号,也就说负反馈信号VF与输出电压VO成正比。
电压负反馈的特点是:电压负反馈能够稳定放大器的输出信号电压。
由于电压负反馈元件是并联在放大器输出端与地之间的,所以能够降低放大器的输出电压2. 电流负反馈电流负反馈是指从放大器输出端取出输出信号电流的一部分作为负反馈信号,换句话说:反馈信号VF与输出电流IO成正比。
电流负反馈的特点是:电流负反馈能够稳定定放大器的输出信号电流。
由于电流负反馈元件是串联在放大器输出回路中的,所以提高了放大器的输出电阻。
3. 串联负反馈电压和电流负反馈都是针对放大器输出端而言的,指负反馈信号从放大器输出端的取出方式。
串联和并联负反馈则是针对放大器输入端而言的,指负反馈信号加到放大器输入端的方式。
串联负反馈网络取出的负反馈信号VF,同放大器的输入信号Vi以串联形式加到放大器的输入回路中的,这样的负反馈称为串联负反馈。
串联负反馈的特点是:串联负反馈右以降低放大器的电压放大倍数,稳定放大器的电压增益。
由于串联负反馈元件是串联在放大器输入回路中的,所以这种负反馈可以提高放大器的输入电阻。
4. 并联负反馈并联负反馈是指负反馈网络取出的负反馈信号VF,同放大大器的输入信号Vi以并联形式加到放大器的输入回路中,这样的负反馈称为并联负反馈。
并联负反馈的特点是:并联负反馈降低放大器的电流放大倍数,稳定放大器的电流增益。
由于并联负反馈元件是与放大器输入电阻相并联的,所以这种负反馈降低了放大器的输入电阻。
5. 负反馈电路种类负反馈电路在放大器的输出端和输入端之间,根据负反馈放大器输入端和输出端的不同组合形式,负反馈放大器共有下列四种电路:电压并联负反馈放大器电路;电压串联负反馈放大器电路;电流并联负反馈放大器电路;电流串联负反馈放大器电路;负反馈电路接在本级放大器输入和输出端之间时称为本级负反馈电路,当负反馈电路接在多级放大器之间时(在前级放大器输入端和后级放大器输出端之间),称为放大环路负反馈电路。

多路输出反激式开关电源的反馈环路设计的输出是直流输入、占空比和负载的函数。
在开关电源设计中,反馈系统的设计目标是无论输入电压、占空比和负载如何变幻,输出电压总在特定的范围内,并具有良好的动态响应性能。
模式的开关电源有延续电流模式(CCM)和不延续电流模式(DCM)两种工作模式。
延续电流模式因为有右半平面零点的作用,反馈环在负载电流增强时输出电压有下降趋势,经若干周期后终于校正输出电压,可能造成系统不稳定。
因此在设计反馈环时要特殊注重避免右半平面零点频率。
当反激式开关电源工作在延续电流模式时,在最低输入电压和最重负载的工况下右半平面零点的频率最低,并且当输入电压上升时,传递函数的增益变幻不显然。
当因为输入电压增强或负载减小,开关电源从延续模式进入到不延续模式时,右半平面零点消逝从而使得系统稳定。
因此,在低输入电压和重输出负载的状况下,设计反馈环路补偿使得囫囵系统的传递函数留有足够的相位裕量和增益裕量,则开关电源无论在何种模式下都能稳定工作。
1 反激式开关电源典型设计图1是为变频器设计的反激式开关电源的典型,主要包括沟通输入整流电路,反激式开关电源功率级电路(有控制器、MOS管、及整流组成),RCD缓冲电路和反馈网络。
其中PWM控制芯片采纳UC2844。
UC2844是电流模式控制器,芯片内部具有可微调的(能举行精确的占空比控制)、温度补偿的参考基准、高增益误差、电流取样。
开关电源设计输入参数如下:三相380V工业沟通电经过整流作为开关电源的输入电压Udc,按最低直流输入电压Udcmin为250V举行设计;开关电源工作频率f为60kHz,输出功率Po为60W。
当系统工作在最低输入电压、负载最重、最大占空比的工作状况下,设计开关电源工作在延续电流模式(CCM),纹波系数为0.4。
设计的第1页共6页。
5.1 线性反馈控制系统的基本结构及其特性在现代控制理论中,控制系统的基本结构和经典控制理论一样,仍然是由受控对象和反馈控制器两部分构成的闭环系统。
不过在经典理论中习惯于采用输出反馈,而在现代控制理论中则更多地采用状态反馈。
由于状态反馈能提供更丰富的状态信息和可供选择的自由度,因而使系统容易获得更为优异的性能。
5.1.1 状态反馈状态反馈是将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参与输入相加形成控制律,作为受控系统的控制输入。
图5.1是一个多输入—多输出系统状态反馈的基本结构。
图5.1 多输入多输出系统状态反馈结构图.x Ax Bu y Cx Du ⎫⎪=+⎬=+⎪⎭ (5.1) 式中n x R ∈;r u R ∈;m y R ∈、n n A ⨯、n r B ⨯、m n C ⨯、m r D ⨯。
若0D =,则受控系统.x Ax Bu y Cx ⎫⎪=+⎬=⎪⎭ (5.2)简记为()0,,A B C =∑。
状态线性反馈控制律u 为u Kx v =+ (5.3)其中 v ——1r ⨯ 维参考输入;K ——r n ⨯维状态反馈系数阵或状态反馈增益阵。
对单输入系统,K 为1n ⨯维行向量。
把式(5.3)代入式(5.1)整理可得状态反馈闭环系统的状态空间表达式.()()x A BK x Bv y C DK x Dv ⎫⎪=++⎬=++⎪⎭(5.4) 若0D =,则.()x A BK x Bv y Cx ⎫⎪=++⎬=⎪⎭ (5.5) 简记为[](),,hA BKBC =+∑。
闭环系统的传递函数矩阵[]1()()k W s C sI A BK B -=-+ (5.6)比较开环系统()0,,A B C =∑与闭环系统[](),,hA BKBC =+∑可见,状态反馈阵K 的引入,并不增加系统的维数,但可通过K 的选择自由地改变闭环系统的特征值,从而使系统获得所要求的性能。
5.1.2 输出反馈输出反馈是采用输出矢量Y 构成线性反馈律。
反馈原理的特点反馈原理,也称为反馈控制原理,是控制理论中的重要概念。
它基于一个简单的原则,即在反馈回路中测量输出并将其与期望值进行比较,以对输入进行调整。
这个过程通常以一个闭环的形式进行,因为反馈信号从输出端返回到输入端来影响输入信号。
在本文中,我们将讨论反馈原理的特点。
一、稳定性反馈原理的最大优点是它提供了稳定性。
在没有反馈的情况下,系统会非常容易变得不稳定,因为它的输出受输入信号的影响。
在反馈回路中,输出信号被测量并与期望值进行比较。
这样一来,系统可以自动进行调整,确保输出信号与期望值保持一致。
因此,反馈能够保持系统的稳定性,并降低系统变得不稳定的风险。
二、精度和灵敏度反馈原理也提高了控制系统的精度和灵敏度。
精度是指系统的输出信号与期望值的接近度。
反馈控制系统能够持续地跟踪实际输出并进行调整,这是因为它通过测量输出并与期望值进行比较来作出决策。
此外,反馈系统的灵敏度也可以得到提高,因为它可以自动对不同的输入信号进行调整,从而使系统更加敏感。
三、鲁棒性反馈原理也提高了控制系统的鲁棒性。
鲁棒性是指系统能够接受和处理各种干扰的能力。
干扰可能来自于外部环境,例如传感器的噪声、电磁干扰和机械振动等。
反馈系统通过实时响应干扰来保持控制系统的稳定性,这样一来,系统就变得更加鲁棒。
四、延迟反馈原理可以减轻信号延迟的问题。
在许多控制系统中,信号的延迟可能会导致控制系统失去稳定性。
这些延迟可能来自于机械过程的滞后或计算机软件的延迟。
反馈控制器可以通过测量输出并即时调整来解决这些问题。
这种反馈机制可以减少对延迟的敏感性,从而提高系统的稳定性。
五、可靠性反馈控制器对于控制系统的可靠性的提高也非常有帮助。
在某些情况下,控制系统可能会发生故障或停止工作。
反馈回路通过提供实时监控和调整来保持系统的稳定性,这可以避免系统出现故障并提高系统的可靠性。
综上所述,反馈原理是一种有用的控制机制,因为它提供了稳定性、精度和灵敏度、鲁棒性、对延迟的容忍性以及可靠性。