柔性铰链运动02ppt课件
- 格式:ppt
- 大小:232.50 KB
- 文档页数:16
七、柔性铰链微动机构的分析与设计一. 实验目的1.认识柔性四连杆机构的形貌2.了解柔性铰链工作台的工作原理及应用前景3.掌握柔性铰链的分析与设计方法4.掌握微位移工作台的分析与设计方法二. 柔性铰链微动机构的用途与发展前景由于宇航和航空等技术发展的需要,对实现小范围内偏转的支承,不仅提出了高分辨率的要求,而且对其尺寸和体积提出了微型化的要求。
人们在经过对各类型的弹性支承的实验探索后,才逐步开发出体积小无机械摩擦、无间隙的柔性铰链。
随后,柔性铰链立即被广泛地用于陀螺仪、加速度计、精密天平、导弹控制喷嘴形波导管天线等仪器仪表中,并获得了前所未有的高精度和稳定性。
如日本工业技术院计量研究所,利用柔性铰链原理研制的角度微调装置,在3分的角度范围内,达到了1000万分之一度的稳定分辨率。
近年来,柔性铰链又在精密位移工作台中得到了实用。
柔性铰链微位移机构具有较高的位移分辨率,再配合压电陶瓷驱动器可实现微小位移,可适合各种介质环境工作。
微位移技术直接影响到微电子技术等高精度工业的发展,如微电子技术随着集成度的提高,线条越来越微细化,与之相对应的工艺设备:光刻机、电子束和x射线曝光机等,其定位精度要求为线宽的1/3~1/5,即亚微米甚至纳米级的精度,这就要求精密工作台具备相应的技术水准,柔性铰链是关键技术之一。
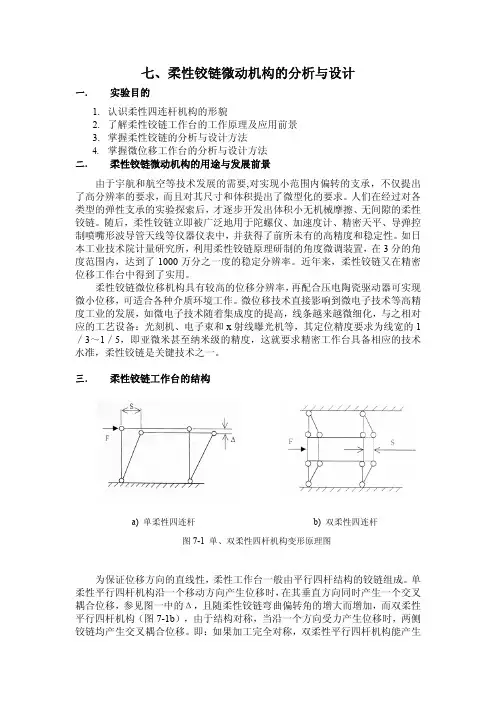
三. 柔性铰链工作台的结构a) 单柔性四连杆b) 双柔性四连杆图7-1 单、双柔性四杆机构变形原理图为保证位移方向的直线性,柔性工作台一般由平行四杆结构的铰链组成。
单柔性平行四杆机构沿一个移动方向产生位移时,在其垂直方向同时产生一个交叉耦合位移,参见图一中的Δ,且随柔性铰链弯曲偏转角的增大而增加,而双柔性平行四杆机构(图7-1b),由于结构对称,当沿一个方向受力产生位移时,两侧铰链均产生交叉耦合位移。
即:如果加工完全对称,双柔性平行四杆机构能产生严格的直线运动,从原理上克服了单柔性平行四杆机构易产生交叉耦合位移的缺陷,是超精密定位系统的首选结构,双柔性工作台结构参见图7-2。