柔性铰链微动机构的分析与设计
- 格式:pdf
- 大小:412.59 KB
- 文档页数:15
柔性连接器的设计与性能分析在现代科技领域中,柔性连接器扮演着至关重要的角色。
它被广泛应用于电子设备、通信设备、医疗仪器等各个领域,为这些设备的正常运行提供了稳定可靠的连接。
本文将探讨柔性连接器的设计原理、性能分析以及未来发展趋势。
柔性连接器的设计首先考虑的是其可靠性和可用性。
由于连接器在实际使用中需要反复弯曲,设计人员必须考虑连接器的弯曲寿命和插拔力。
首先,材料的选择是关键因素之一。
通常使用导电弹性材料或弹性导电材料作为柔性连接器的材料,因其具有优异的导电性和弯曲弹性。
此外,设计人员还需根据连接器所处的环境条件选择合适的材料,以确保连接器的稳定性和可靠性。
除了材料选择,连接器的结构设计也影响着其性能。
一种常见的设计是采用弯曲导电片的形式,此种设计可以有效地提高连接器的柔性和导电能力。
同时,连接器应具备适当的插拔力,既不会过于松散导致信号传输不畅,也不会过于紧密导致插拔困难。
因此,在设计中,需进行参数优化,考虑插拔力与导电性之间的平衡关系。
性能分析是判断柔性连接器质量好坏的重要指标之一。
性能分析通常包括弯曲寿命测试、插拔测试和电气性能测试。
弯曲寿命测试可以模拟连接器在实际应用中的弯曲过程,并评估其是否能满足预期的寿命要求。
插拔测试则是模拟连接器插拔的使用情况,测试其使用寿命和插拔力是否符合设计要求。
最后,电气性能测试用于评估连接器的导电性能和信号传输质量。
这些性能测试是保证连接器质量和可靠性的重要手段。
随着科技的不断进步,柔性连接器也在不断演进发展。
一方面,随着电子设备的迷你化、模块化的趋势,柔性连接器将变得越来越小型化,并将更好地适应各种复杂环境。
另一方面,由于人工智能和物联网的快速发展,柔性连接器也将在更广泛的应用中发挥重要作用。
例如,它可以用于连接智能家居设备、智能穿戴设备等,使得设备之间可以实现高效的数据传输和互联互通。
总之,柔性连接器在现代科技领域中扮演着不可忽视的角色。
在设计过程中,材料选择和结构设计是关键因素,而性能分析则是评估连接器质量和可靠性的重要手段。
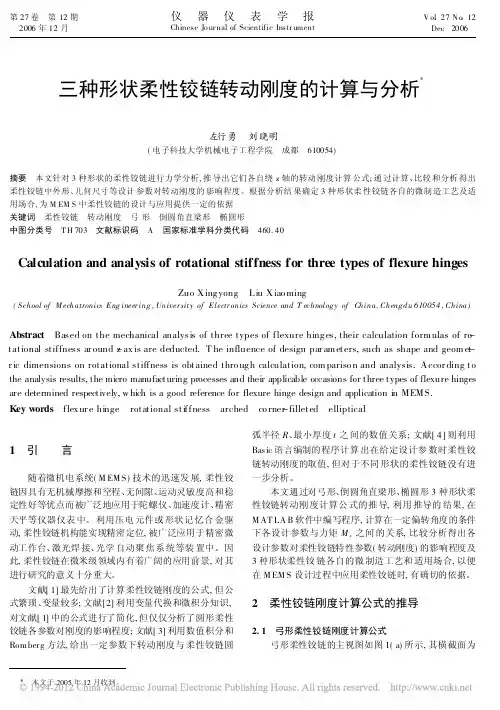
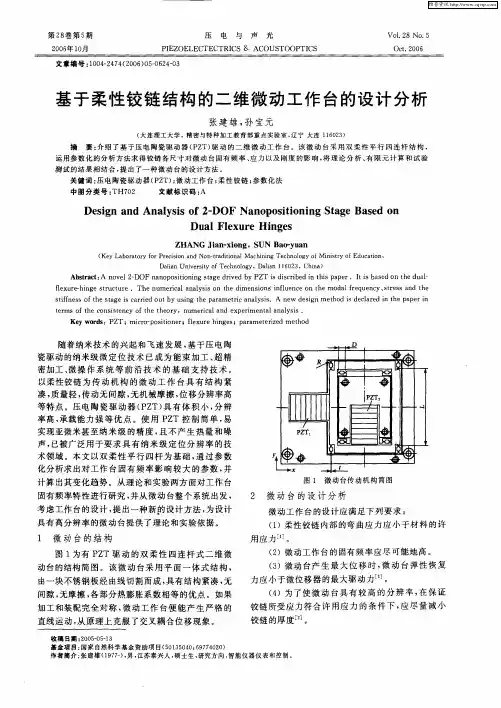
3—RRR交错轴型平面柔性机构设计与分析文章利用柔性铰链替代刚性铰链的设计方法,结合3-RRR型平面平台的刚性结构图设计了一个新的3-RRR型平面柔性平台,并运用平面二自由度并联机器人运动学正解方法,对该型平台进行运动学正解的理论分析。
在获得正解结果的基础上,结合有限元仿真分析,对所得输出位置结果进行验证,在满足误差?芨10%的情况下,证明了有限元分析结果与理论结果是一致的,且该模型可做位移或平面力传感器使用。
文章所做的研究也为新型多自由度平面型柔性平台的运动学分析提供借鉴。
标签:柔性铰链;3-RRR型平台;运动学分析;有限元分析1 绪论随着微纳米科技的兴起与不断发展,具有高精度的精密定位机构在近代科学的研究领域和尖端工业生产中扮演着重要的角色。
由弹性元件构成具有低误差、无摩擦、空间小等优点的柔性机构,逐渐引起了微精密工程设计人员的广泛关注。
少自由度并联机器人由于其驱动元件少、造价低、结构紧凑、误差小、精度高等优点。
近年来平面柔性平台的应用成为机构学领域中研究的热点。
具体应用[1]包括:扫描探针显微镜和计量仪、纳米探针扫描、内存存储器、硬盘驱动器及生物成像等设备。
文章以3-RRR型平面柔性平台为研究对象,利用二自由度平面机构的运动学[2]知识对其进行运动学正解的理论分析,得出输入位移与输出位移之间的关系。
再结合柔性铰链、伪刚体模型[3]的知识,将3-RRR型平台三自由平台中的转动副用交错轴柔性铰链进行替换,得到所需柔性机构。
并利用有限元分析[4,5]对运动学正解进行验证。
而且文章所设计的平台可以采用转动电机驱动,结构简单。
2 3-RRR平面柔性机构并联设计利用柔性铰替代刚性铰的方法进行柔性平台的设计。
所采用的刚体模型结构为平面3-RRR并联平台刚性机构,结构简图如图1所示。
将每个刚性转动副都换成柔性转动铰链,而柔性铰链的选取有很多种类型,如交错轴柔性铰链、裂筒式柔性铰链、车轮式柔性铰链、直角型柔性铰链、正圆型柔性铰链及三角型柔性铰链等。

平面柔性铰链导向机构刚度分析与实验测试平面柔性铰链导向机构是近年来广泛应用于机械设备的一种新型机械手动控制机构。
它具有结构简单、加工成本低、重量轻、体积小、安装容易等诸多优点,因此被越来越多的工业用户采用,但在实际应用中仍然存在一些问题,比如机构刚度不足和稳定性差等。
因此,研究平面柔性铰链导向机构的刚度分析和实验测试具有重要的应用价值。
首先,对于平面柔性铰链导向机构的刚度分析,主要是通过计算机模拟的方法来进行,利用计算机模拟软件,分析机构中杆件的刚度和抗力,从而评估机构的整体刚度,为设计准确的机构提供参考。
其次,在对平面柔性铰链导向机构进行实验测试时,则需要采用小组及机构测试装置,分析机构中各部件的变形情况,从而定量分析机构的整体刚度和抗力。
为了进一步研究平面柔性铰链导向机构的刚度,研究者们还采用了变形法、弹性理论、有限元分析等数值方法来进行研究,可以从多个角度对机构进行有效的分析,实现机构的有效设计。
总的来说,研究者们已经研究出了一系列的方法来分析平面柔性铰链导向机构的刚度,实现了机构的有效设计。
平面柔性铰链导向机构的刚度分析和实验测试,可以有效地促进机构的整体性能,从而改善机构的实际应用效果。
然而,由于机构的复杂性,机构刚度的测试过程也会变得复杂,同时,伴随着材料的不断优化,机构的加工技术也会得到不断的改进,这些因素也都会影响机构的刚度。
因此,研究者们要不断深入研究,对机构的刚度分析和实验测试有更深入的研究,以期获得更好的实际应用效果。
综上所述,平面柔性铰链导向机构的刚度分析和实验测试,是机构设计和应用中的重要研究内容,其研究结果可以有效改进机构的设计,并实现较高的机构效率和质量。
然而,还有一些技术上的困难需要解决,比如机构刚度分析和实验测试的缺陷,以及材料的不断优化等方面的技术难题,有待研究者们的深入研究。
以上就是关于《平面柔性铰链导向机构刚度分析与实验测试》的3000字文章。
通过分析,可以看出,研究平面柔性铰链导向机构的刚度分析和实验测试对于提高机构的效率、质量和实用性具有重要意义,但还存在一些挑战需要解决,因此需要有更多的深入研究。
柔顺机构是在驱动力作用下,通过自身柔性构件的弹性变形实现力和能量传递,并获得部分或全部运动的一类机构[1]。
相对于传统的刚性机构,柔顺机构在运动过程中没有摩擦与磨损,体积小、质量轻、加工简单、没有装配误差等优势。
因此,在精密定位、高速刀具、微夹持操纵等领域应用广泛[2-4]。
张建锐建立了柔顺储能J/S 型机构的伪刚体模型,分析了其刚度特性[5]。
马力设计了一种3自由度运动平台,实现了纳米级的定位[6]。
胡俊峰应用伪刚体模型设计了一种零刚度柔顺微动平台,该机构实现了在0.6mm~1.7mm 运动范围内输出力几乎无变化[7]。
凌明祥通过柔性梁的动刚度矩阵与矩阵位移法相结合[8],建立了柔顺机构的伪静态模型,这种模型可以实现静/动力学同时建模[8]。
本文应用柔性梁的动刚度矩阵,建立了一种单自由度柔顺铰链的伪静态模型,分析了其静力学与动力学行为。
通过优化柔顺铰链的尺寸,可以得到试用于不同工作状态的柔顺铰链模型。
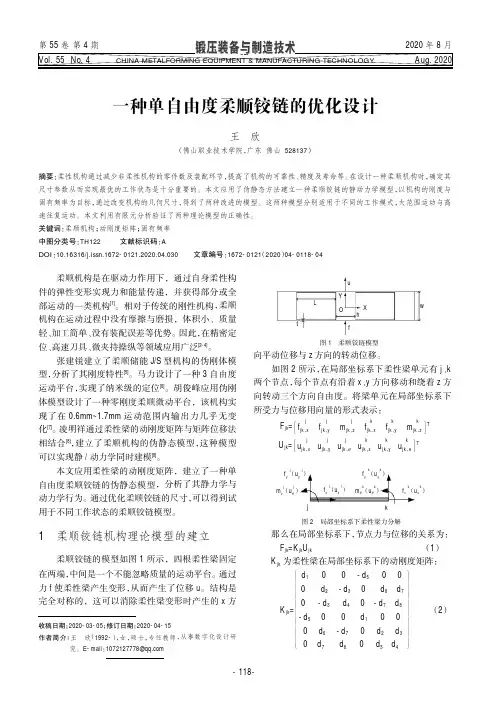
1柔顺铰链机构理论模型的建立柔顺铰链的模型如图1所示,四根柔性梁固定在两端,中间是一个不能忽略质量的运动平台。
通过力f 使柔性梁产生变形,从而产生了位移u 。
结构是完全对称的,这可以消除柔性梁变形时产生的x 方向平动位移与z 方向的转动位移。
如图2所示,在局部坐标系下柔性梁单元有j 、k 两个节点,每个节点有沿着x 、y 方向移动和绕着z 方向转动三个方向自由度。
将梁单元在局部坐标系下所受力与位移用向量的形式表示:F jk =f j jk ,xf jjk ,ym jjk ,zf kjk ,xf kjk ,ym kjk ,z[]T U jk =u jjk ,x u jjk ,y u jjk ,θu kjk ,x u kjk ,y u kjk ,θ[]T那么在局部坐标系下,节点力与位移的关系为:F jk =K jk U jk(1)K jk 为柔性梁在局部坐标系下的动刚度矩阵:K jk =d 100-d 5000d 2-d 30d 6d 70-d 3d 40-d 7d 8-d 500d 100d 6-d 70d 2d 3d 7d 8d 3d 4⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥(2)图2局部坐标系下柔性梁力分解f j y (u jy )m k θ(u kθ)f jx (u jx )f k y (u ky )f k x (u kx )m jz (u jθ)j k图1柔顺铰链模型L Xh Y utfO w收稿日期:2020-03-05;修订日期:2020-04-15作者简介:王欣(1992-),女,硕士,专任教师,从事数字化设计研究。
三角形柔性铰链动力学建模与分析三角形柔性铰链动力学建模与分析摘要:三角形柔性铰链作为一种柔性旋转单元,具有行程大、静态定位精度高、轴漂小等优良的静态特性。
为保证该柔性铰链具有很高的动态定位精度以及较强的抗干扰能力,还需要提高其动态特性。
提高三角形柔性铰链动态特性的关键在于建立其动力学模型,并分析影响其动态特性的各种因素。
为此,利用集中参数法建立了三角形柔性铰链的动力学模型,对影响其基频特性的关键因素进行了分析,并通过有限元模态分析验证了所建模型的准确性。
关键词:三角形柔性铰链;动力学中图分类号:O313文献标识码: A 文章编号:0 前言柔性铰链是经过一体化设计和加工并利用材料弹性变形来实现预期运动的具有一定形状的特殊运动副,具有无间隙、无摩擦、免润滑以及高分辨率等一系列优点。
根据柔性单元的不同,柔性铰链主要分为缺口型柔性铰链及簧片型柔性铰链。
相对于缺口型柔性铰链,簧片型柔性铰链具有大行程、长寿命且不易产生应力集中等优点,极大扩展了柔性铰链的应用领域。
簧片型大行程柔性铰链已在航天、精密定位等领域得到广泛应用[1-3]。
目前对于柔性铰链(机构)的研究主要集中在运动学领域[4-6]。
但对柔性铰链(机构)尤其是大行程柔性铰链的动力学问题的研究还比较少。
Lyon等人[7]利用伪刚体模型分析了柔性平行导向机构的基频。
Boyle等人[8]利用伪刚体模型研究了柔性常力机构的动态响应问题。
Yue-Qing Yu等人[9]以机构学中功能等效原理为依据,以伪刚体模型为基础,建立了柔性机构伪刚体动力学模型。
Zhe Li和Shidhar Kota[10]利用有限元方法研究了分布式柔性机构的动力学问题,包括固有频率、固有模态以及动态响应等。
K-B Choi. [10]利用集中参数法建立了含簧片柔性单元的柔性机构动力学模型,但该动力学模型没有考虑簧片质量的影响。
Vijay Shilpiekandula等人[11]在文献[10]的基础上利用Timoshenko梁单元建立了角度调节柔性机构的动力学模型,并对其动态特性问题进行了研究。
三角形柔性铰链动力学建模与分析三角形柔性铰链动力学建模与分析摘要:三角形柔性铰链作为一种柔性旋转单元,具有行程大、静态定位精度高、轴漂小等优良的静态特性。
为保证该柔性铰链具有很高的动态定位精度以及较强的抗干扰能力,还需要提高其动态特性。
提高三角形柔性铰链动态特性的关键在于建立其动力学模型,并分析影响其动态特性的各种因素。
为此,利用集中参数法建立了三角形柔性铰链的动力学模型,对影响其基频特性的关键因素进行了分析,并通过有限元模态分析验证了所建模型的准确性。
关键词:三角形柔性铰链;动力学中图分类号:O313文献标识码: A 文章编号:0 前言柔性铰链是经过一体化设计和加工并利用材料弹性变形来实现预期运动的具有一定形状的特殊运动副,具有无间隙、无摩擦、免润滑以及高分辨率等一系列优点。
根据柔性单元的不同,柔性铰链主要分为缺口型柔性铰链及簧片型柔性铰链。
相对于缺口型柔性铰链,簧片型柔性铰链具有大行程、长寿命且不易产生应力集中等优点,极大扩展了柔性铰链的应用领域。
簧片型大行程柔性铰链已在航天、精密定位等领域得到广泛应用[1-3]。
目前对于柔性铰链(机构)的研究主要集中在运动学领域[4-6]。
但对柔性铰链(机构)尤其是大行程柔性铰链的动力学问题的研究还比较少。
Lyon等人[7]利用伪刚体模型分析了柔性平行导向机构的基频。
Boyle等人[8]利用伪刚体模型研究了柔性常力机构的动态响应问题。
Yue-Qing Yu等人[9]以机构学中功能等效原理为依据,以伪刚体模型为基础,建立了柔性机构伪刚体动力学模型。
Zhe Li和Shidhar Kota[10]利用有限元方法研究了分布式柔性机构的动力学问题,包括固有频率、固有模态以及动态响应等。
K-B Choi. [10]利用集中参数法建立了含簧片柔性单元的柔性机构动力学模型,但该动力学模型没有考虑簧片质量的影响。
Vijay Shilpiekandula等人[11]在文献[10]的基础上利用Timoshenko梁单元建立了角度调节柔性机构的动力学模型,并对其动态特性问题进行了研究。