基于MATLAB的轮毂电机驱动电动汽车的平顺性研究
- 格式:pdf
- 大小:2.00 MB
- 文档页数:5
四轮独立电动汽车的驱动控制与平顺性(续2)刘鑫;许鸣珠【期刊名称】《汽车工程师》【年(卷),期】2016(000)008【总页数】5页(P21-24,27)【作者】刘鑫;许鸣珠【作者单位】石家庄铁道大学;石家庄铁道大学【正文语种】中文3 最优控制驱动系统最优控制方法可以利用性能指标进行合理控制,实现快速处理,其能耗小,易于实现状态反馈。
文章将系统的电流变化值(ΔI)作为性能指标。
利用MATLAB软件提供的系统辨识工具箱,根据已知情况对驱动系统模型进行合理辨识[8],建立反馈调节。
关于模型类别,汽车的控制问题对于二阶线性参数模型理论比较成熟,在辨识试验中根据输入输出数据,参考文献[8]可以把驱动系统的动态模型阶次定为二阶,建立数学模型,如式(1)所示。
式中:I——电机驱动系统的输出电流,A;U——输入给驱动电机的D/A控制量,经过D/A转换为电压值,V;a,b,c——电机数学模型的相关参数。
最后得到 a=1.365,b=4.439,c=23.33,曲线的拟合率为99.1%,所建立的模型符合电机数学模型的建立要求。
电流的反馈调节需要反馈电机电流的相对变化值,要对前面得到的式(1)进行变换。
式中:ΔI——电机驱动中电流的相对变化值,A;ΔU——电机驱动中电压的相对变化值,V。
将式(2)变形,列出包括状态变量x的状态方程,则其相关模型为:其中:式中:A,B——系统方程系数矩阵;U(t)——输入变量;x(t)——状态变量。
已给定初始条件 X(t0)=X0,寻找最优控制 U(t),使下面的线性二次型最优控制指标最小。
式中:Q,R——对状态变量和输入向量的加权矩阵;tf——控制作用的终止时间,s。
如果想要指标最小,那么最优控制为:对于线性系统,当tf趋向于无穷,P趋向于常数矩阵,得到代数方程Riccati的解。
其中反馈增益矩阵为:驱动的最优控制为:式中:K——反馈系数矩阵,也是常数矩阵;r——参考输入;P——代数方程Riccati也就是式(6)的常数解,这里利用ΔU建立电压的反馈调节。
基于MATLAB电动汽车仿真研究
刘某兴;阮米庆;王晨
【期刊名称】《客车技术》
【年(卷),期】2010(000)001
【摘要】针对目前电动汽车领域大量使用ADVISOR、CRUISE等专业性能仿真工具进行前期设计的再现状的分析,描述了一种独立于MAILAB/SIMULINK模块,完全依托MATLAB编程语言所构建的纯电动汽车数学模型以及各个子模块模型,解决了传统设计人员不能与专业仿真软件中各模块底层代码交互的问题.这里以某纯电动轻型商用车为例,构建其蓄电池模型并仿真出其恒电流、恒功率放电曲线以及整车加速性能曲线和在SFUDS车辆运行工况下的续驶里程.
【总页数】6页(P7-11,6)
【作者】刘某兴;阮米庆;王晨
【作者单位】南京航空航天大学,能源与动力学院;南京航空航天大学,能源与动力学院;南京航空航天大学,能源与动力学院
【正文语种】中文
【相关文献】
1.基于AMESim和Matlab的纯电动汽车双热源热泵建模与仿真研究 [J], 夏彬彬;田镇;杨林;谷波
2.基于MATLAB的四轮转向电动汽车横向稳定性控制仿真研究 [J], 雷敏
3.基于MATLAB/Simulink的电动汽车非车载充电机仿真研究 [J], 荣海;王印松;薛金会;李涛永
4.基于MATLAB和VC++的纯电动汽车动力性能仿真研究 [J], 彭才望;阳林;詹沛枝
5.基于MATLAB仿真的电动汽车主动悬架研究 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
个人资料整理仅限学习使用武汉工业学院毕业设计<论文)2018届毕业设计(论文>题目:基于MATLAB的汽车道路模型研究院<系)机械工程学院专业名称机械设计制造及其自动化学生姓名瞿先明学生学号 070301133指导教师胡志刚侯传亮2018年6月9日摘要汽车虚拟样机技术,是计算机技术应用到机械行业中来以后产生的一种新的汽车振动性能实验方法。
但虚拟样机技术实验的结果,强烈地依赖于所建立的仿真模型的真实程度。
目前大多数汽车振动分析的激振信号,采用随机信号或变频正弦激励信号,虽然激振频带能包含汽车固有频率,但激振信号并不能代替实际路面振动情况。
行驶平顺性是汽车的重要性能之一,它不仅影响了乘客的乘坐舒适性,而且也是防止司机疲劳,避免造成车祸的重要因素,因此行驶平顺性曰益受到人们的重视。
但是传统的研究分析方法已无法满足现代汽车的研究要求,虚拟样机技术作为一项新的技术,已经开始用到各个领域。
本文比较详细的介绍了行驶平顺性的概念、评价指标和评价方法以及目前该领域的研究现状。
介绍了MATLAB/SIMULINK软件的主要模块和软件的理论基础,为后面的建模和仿真分析奠定了基础。
并在MATLAB 平台下,利用滤波白噪声生成法重构时域路面不平度仿真模型,并考虑行驶速度对汽车振动的影响。
关键词:随机路面 MATLABADAMS 道路模型AbstractThe virtual prototype technology is a computer technology that applied to mechanical industry,Which after a new cars produced vibration performance test methods. But the results of the virtual prototype technologyexperiment, intraoperative dependent strongly on the simulation model, that is established by the true extent.Most current auto vibration analysis vibration signal, using random signals or frequency conversion.Although the excitation frequency band can include the automobile inherent frequency, but excitation letter Number cannot replace real pavement vibration circumstances.The tiding comfort is one of the most important performances of vehicle.It call influencenot only the feeling of passengers,but also the prevention of crash by avoiding making the driver tired. So it is paid more and more emphasis gradually.The traditional research method can’t not match the modern requirement of vehicle’s research and development.So Virtual Prototyping Technology has been applied in many fields as a new industrial technology.This dissertation introduces theconcept, evaluatingindicator, evaluation method and the present status of vehicle tiding comfort in detail. Then the key modules and the theoretical basis of MATLAB are introduced,which will be used in the following chapters.These theories are the base of subsequent model building and simulation analysis.In MATLAB flat, we use filtering White noise generating method, that can reconstruct road roughness simulation model of time domain, and consider the road Speed on the influence of auto vibration.Key words: random road MATLABADAMSroad mode目录1 绪论1.1 引言当今计算机技术飞速发展,虚拟样机技术也应运而生,已经成为与物理样机实验同样重要的研究手段。
2020年9月Sep. 2020第37卷 第9期Vol. 37 No. 9新乡.学院学报..Journal of Xinxiang University基于MATLAB 的电动汽车传动系统的优化张贤栋(安徽机电职业技术学院汽车与轨道学院,安徽 芜湖241000)摘 要:针对固定速比减速器和两档AMT 变速器两种电动汽车的传动系统,利用MATLAB 软件分别从传动效率、电机匹配度、能耗及电池发热等四方面对两种传动系统的性能进行分析与对比,并得出结论:两档AMT 变速器的性能优于固定速比减速器,可选择两档AMT 变速器作为电动汽车的传动系统。
关键词:MATLAB ;电动汽车;固定速比减速器;两档AMT 变速器中图分类号:TH 136 文献标识码:A 文章编号:2095-7726(2020)09-0065-04目前,燃油汽车已成为人们出行的主要交通工具。
燃油汽车的增多,不仅消耗了珍贵的石油资源,而且因 排放有害气体加重了空气污染,甚至严重影响人们的 身心健康⑴。
因此,人们已开始研究用新能源汽车代替传统燃油汽车的问题。
随着锂电池设计水平的提高和 制造技术的发展,其应用领域也变得越来越广。
由于锂电池具有节能和环保的双重优势,以锂电池为动力源的新能源汽车代替传统的燃油汽车已成为当今及未来 汽车行业发展的趋势⑵。
锂电池动力源和传动系统是电动汽车的关键部件,锂电池的质量决定了电动汽车的整体性能,而传动 系统的质量决定了电动汽车的灵敏度和故障率⑶。
由 此可见,传动系统在电动汽车中占据重要地位。
现在,电动汽车仍处于试验和推广阶段,研究人员关心最多 的是电池的散热与续航能力,忽略的是传动系统结构 的优化与改进。
因此,电动汽车仍然采用燃油汽车的传动系统,会造成传动系统与电池的使用出现不匹配或脱节等现象,其结果是电动汽车整车的可靠性与稳定 性都较差。
在本文中,笔者基于MATLAB 软件对电动 汽车的传动系统进行了研究,为电动汽车的传动系统 优化与升级提供了理论依据。
matlab电机标定,一种纯电动汽车驱动电机台架自动标定方法及其装置与流程一、主题介绍在纯电动汽车的开发和生产过程中,电机标定是一个非常重要的步骤。
电机标定是指通过一系列实验和测试,确定电机的性能参数和特性曲线,以便在实际应用中进行精准控制和优化。
而针对纯电动汽车驱动电机台架自动标定方法及其装置与流程,MATLAB提供了一种高效、精确的解决方案。
二、MATLAB电机标定原理在MATLAB中,通过搭建相应的模型和算法,可以对电机进行自动化标定。
这一方法主要基于电机的动态特性和响应,并利用控制系统理论和数学建模技术进行参数识别和匹配。
通过一系列的实验和测试,MATLAB可以精准地确定电机的转子惯量、电阻、电感、磁链和特性曲线等参数,从而为电机的控制和优化提供必要的数据支持。
三、纯电动汽车驱动电机台架自动标定方法在纯电动汽车的生产线上,为了能够高效地进行电机标定,专门设计了一套自动化的标定方法。
该方法利用MATLAB软件与电机测试台架相结合,实现了自动化的标定流程。
通过预设的实验方案和测试程序,自动进行电机的运行和数据采集,并通过MATLAB算法分析和处理,最终得到电机的精准参数和特性。
四、纯电动汽车驱动电机台架自动标定装置纯电动汽车驱动电机台架自动标定装置由电机测试台架、数据采集设备、控制单元和MATLAB软件组成。
在实际应用中,通过与电机测试台架连接,数据采集设备实时采集电机的运行数据,传输至MATLAB软件进行处理,同时控制单元根据预设的标定流程实现电机运行和参数采集的自动化控制。
五、纯电动汽车驱动电机台架自动标定流程纯电动汽车驱动电机台架自动标定流程包括初始化设置、实验方案选择、测试数据采集、MATLAB算法运行、参数确定和结果输出等步骤。
整个流程主要依靠MATLAB自动化完成,大大提高了电机标定的效率和准确度。
通过这一流程,可以快速、精准地完成电机的标定工作。
六、个人观点和总结纯电动汽车驱动电机台架自动标定方法及其装置与流程,通过MATLAB提供了一种高效、精确的解决方案。
第28卷 第2期 河南工学院学报Vol.28 No.2 2020年3月 Journal of Henan Institute of Technology Mar. 2020收稿日期:2019-12-24基金项目:河南省科技攻关计划(192102210063);教育部产学合作协同育人项目(201901186011);教育部产学合作协同育人项目(201901203004);河南省高等学校青年骨干教师培养计划项目(2016GGJS-196)第一作者简介:刘刚(1981―),男,河南新乡人,讲师,博士,主要从事汽车底盘电子控制技术研究。
15轮毂驱动电动汽车复合制动防抱死协调控制及舒适性研究刘 刚,于汇泳,侯锁军(河南工学院 车辆与交通工程学院,河南 新乡 453003)摘要:针对轮毂驱动电动汽车电机-液压复合制动系统的协调控制问题和舒适性问题,提出了基于滑模变结构控制算法和模糊算法的控制策略,首先利用滑模算法根据车辆状态参数来计算电动汽车所需的制动总转矩,再利用模糊算法根据制动踏板行程l 和电池SOC 来计算液压制动和电机制动转矩分配比例。
其中液压制动转矩作为汽车制动转矩中的基础制动转矩,用电机转矩调节车轮滑移率,以实现防抱死控制,并且由于液压制动轮缸的压力变化减少,制动舒适性得以提高。
最后采用Matlab/Simulink 、Amesim 和Carsim 软件联仿,分别进行高附着和低附着路面仿真,仿真结果表明复合制动系统的防抱死协调控制策略不仅有效,而且改善了ABS 介入时的舒适性。
关键词:车辆动力学;防抱死控制系统(ABS );滑模控制算法;复合制动中图分类号:U461.2 文献标识码:A 文章编号:2096–7772(2020)02–0015–06轮毂电机驱动电动汽车的发展,可以有效应对汽车尾气排放造成的环境污染等问题。
电动汽车多采用制动能量回收技术以有效节省能源,但制动能量回收技术中的电机制动存在转矩不足的问题,多数研发机构采用液压-电机复合制动系统来改善这一问题。
基于MATLAB的汽车动力性仿真实验【摘要】文章从车辆动力学的角度建立了汽车动力性数学模型,用MATLAB编程,对某轻型货车的动力性能参数进行计算并仿真出其驱动力-行驶阻力平衡图、行驶加速度及加速度倒数曲线图,计算出该轻型货车的最高车速及II档起步加速到70km/h所需的时间,为研究该型载货汽车的动力性能提供了很好的依据。
【关键词】MATLAB;轻型货车;动力性能;仿真一、前言汽车动力性是评价汽车性能的重要指标,通常用汽车的最高车速、加速时间和最大爬坡度来评定。
绘出汽车驱动力-行驶阻力平衡图和汽车加速度曲线图是求出最高车速、加速时间和最大爬坡度的前提,本文通过MATLAB仿真求出实验用轻型货车的动力性指标,使其参数指标优化轻型货车的动力性匹配实验。
二、实验用轻载货汽车本实验用使用的汽车是福田轻型厢式货车。
其主要的技术参数见表1。
变速器传动比数据见表2。
三、建立汽车动力性数学模型1.发动机的外特性利用FZD发动机综合实验台测出该型厢式货车汽车的外特性的功率与转矩曲线,利用多项式拟合求出发动机的转矩多项式,(1)式中,为发动机转矩();为发动机转速(r/min);系数可由曲线拟合中的最小二乘法来确定;k取4。
求得:发动机最低转速=600r/min,最高转速=4000r/min2.汽车行驶方程的建立及计算模型汽车行驶时的一般方程式为:式中:分别是驱动力、滚动阻力、空气阻力、坡度阻力和加速阻力;为发动机转矩;分别为变速器传动比、主减速器传动比;为传动系机械效率;为滚动阻力系数;为空气阻力系数;A为迎风面积;为车速;为道路坡度;为汽车旋转质量换算系数;分别为汽车质量、行驶加速度。
不考虑坡度阻力和加速阻力时,方程(2)变为:(3)可得最高车速:(4)不考虑坡度阻力由汽车行驶方程可得加速时间:(5)由动力学可知:(6)汽车等速行驶时得到最大坡度:四、仿真过程1.汽车汽车驱动力-行驶阻力平衡图仿真编写程序在MATLAB中做出汽车驱动力-行驶阻力平衡图,图1。
基于Matlab的伺服电机正反转动画仿真:学号:201410009日期:2015 6 25指导教师:摘要伺服电机是指在伺服系统中控制机械原件运转的动力元件,是一种补助马达间接变速装置。
伺服电机控制速度,为止精度较高,伺服电机转子运转速度受输入信号控制,并能快速反应。
在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
在这里我基于自己所学专业限制,做了一个基于Matlab 的伺服电机正反转的动画仿真。
关键词:伺服电机动画仿真一、Matlab简介MATLAB是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MA TLAB和Simulink 两大部分。
MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂〔矩阵实验室〕。
是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言〔如C、Fortran〕的编辑模式,代表了当今国际科学计算软件的先进水平。
MATLAB由一系列工具组成。
这些工具方便用户使用MA TLAB的函数和文件,其中许多工具采用的是图形用户界面。
包括MA TLAB桌面和命令窗口、历史命令窗口、编辑器和调试器、路径搜索和用于用户浏览帮助、工作空间、文件的浏览器。
随着MATLAB的商业化以及软件本身的不断升级,MATLAB的用户界面也越来越精致,更加接近Windows的标准界面,人机交互性更强,操作更简单。
而且新版本的MATLAB提供了完整的联机查询、帮助系统,极大的方便了用户的使用。
四轮驱动电动汽车永磁同步轮毂电机驱动系统转矩控制研究一、本文概述随着电动汽车技术的不断发展,四轮驱动电动汽车因其卓越的操控性和动力性能受到了广泛关注。
作为电动汽车的核心组成部分,驱动系统的性能直接决定了车辆的整体性能。
永磁同步轮毂电机作为一种高效、紧凑的驱动方式,在四轮驱动电动汽车中具有重要的应用价值。
本文旨在对四轮驱动电动汽车永磁同步轮毂电机驱动系统的转矩控制进行研究,以提高其控制精度和动态响应性能,为电动汽车的进一步发展提供理论和技术支持。
本文首先介绍了四轮驱动电动汽车及其驱动系统的基本结构和特点,重点阐述了永磁同步轮毂电机的工作原理和性能优势。
随后,详细分析了转矩控制技术在永磁同步轮毂电机驱动系统中的应用现状,指出了现有控制方法存在的问题和挑战。
在此基础上,本文提出了一种新型的转矩控制策略,并通过仿真和实验验证了其有效性和优越性。
本文的研究内容主要包括以下几个方面:建立了四轮驱动电动汽车永磁同步轮毂电机驱动系统的数学模型,为后续的控制策略研究提供了理论基础;设计了一种基于模糊逻辑和神经网络的转矩控制算法,实现了对电机转矩的精确控制;再次,通过仿真分析,研究了不同控制策略下系统的动态性能和稳定性;通过实验验证了所提控制策略在实际应用中的可行性和可靠性。
本文的研究成果对于提高四轮驱动电动汽车永磁同步轮毂电机驱动系统的控制精度和动态响应性能具有重要的理论价值和实际意义。
本文的研究方法和思路也为其他类型的电动汽车驱动系统控制策略的研究提供了有益的参考和借鉴。
二、永磁同步轮毂电机驱动系统概述随着电动汽车技术的快速发展,轮毂电机驱动系统作为一种新型驱动方式,正在逐渐得到广泛的关注和应用。
其中,永磁同步轮毂电机驱动系统以其高效率、高功率密度和良好的调速性能等优点,成为电动汽车驱动系统的重要发展方向。
永磁同步轮毂电机驱动系统主要由永磁同步电机、功率转换器、控制系统和轮毂等部分组成。
其中,永磁同步电机作为系统的核心部件,其性能直接影响到整个驱动系统的性能。
提供全套毕业论文图纸,欢迎咨询编号毕业设计(论文)题目基于Matlab的汽车动力性与经济性分析计算二级学院专业车辆工程班级学生姓名学号指导教师职称时间目录摘要 (I)Abstract (II)1绪论 (1)1.1选题背景 (1)1.2国内外汽车动力性经济性仿真研究发展过程与现状 (2)1.3课题研究主要内容与意义 (3)2汽车动力性经济性计算中发动机模拟的理论基础 (5)2.1发动机数学模型的建立 (5)2.1.1发动机外特性 (5)2.1.2发动机万有特性 (8)2.2本章小结 (10)3汽车动力性模拟计算 (12)3.1汽车最高车速的计算 (13)3.2加速时间的计算 (16)3.2.1原地起步加速时间 (17)3.2.2超车加速时间 (19)3.3最大爬坡度的计算 (19)3.4各档动力因数的计算 (21)3.5小结 (23)4汽车燃油经济性模拟计算 (24)4.1汽车燃油经济性的评价指标 (24)4.2不同行驶工况的汽车燃油经济性计算 (25)4.2.1等速工况 (25)4.2.2加速工况 (25)4.2.3减速工况 (27)4.2.4怠速工况 (27)4.2.5多工况循环百公里油耗 (27)4.3等速行驶工况的汽车燃油经济性计算 (27)4.4影响汽车燃油经济性的因素 (31)4.5小结 (38)5动力性和燃油经济性的参数敏感性分析 (39)5.1汽车动力性的参数敏感度分析 (39)5.2汽车燃油经济性的灵敏度分析 (40)5.3本章小结 (42)6结论 (44)致谢 (46)参考文献 (47)附录 (49)附录一 (49)附录二 (51)附录三 (62)附录四 (68)文献综述 (85)摘要本文首先利用了最小二乘法和回归分析法对所给试验数据拟合,得到了一个函数化的发动机外特性模型和万有特性模型,为后文汽车动力与燃油经济性的仿真奠定了基础。
然后,我们建立了汽车的动力性数学模型,详细分析了汽车动力性的几个评价指标,给出各个指标的计算方法及计算公式,并绘制出汽车的动力特性图,在完成动力性仿真分析之后,我们建立了汽车燃油经济性的数学模型,分析不同工况下汽车的燃油经济性并重点分析等速百公里的燃油消耗量,得到不同档位下不同车速的等速百公里燃油消耗量,并从汽车的使用方面和汽车结构方面详细的分析了影响汽车燃油经济性的因素。
基于Matlab 的电动汽车用永磁同步电机控制系统设计摘要:近年来,随着能源的危机及人们对环境污染的重视,采用新型洁净的电动汽车代替传统以汽油为源动力的汽车已经成为当前各大汽车公司和科研院所研究的热点。
永磁同步电机以其结构简单、方便及易于实现等特点,成为目前电动汽车重要的动力驱动设备。
本文提出一种基于滑模理论的电动汽车用永磁同步电机速度控制策略,利用Matlab/Simulink软件将滑模控制与PI控制进行对比,验证了滑模控制具有更强的鲁棒性,为电动汽车驱动系统设计高鲁棒性的控制器提供一定的理论基础。
关键词:电动汽车;永磁同步电机;PID控制;滑模控制;1 引言汽车是人们的重要交通工具,然而由其带来的环境污染和能源危机问题已经成为新世纪人类所面临的两大亟待解决的难题。
如何在平衡汽车带来的便利的同时,最大程度上降低其带来的负面效应,是当前汽车制造业最为关注的问题[1]。
电动汽车是以车载电源为动力,用电机驱动车轮行驶。
由于其对环境影响相对于传统汽车较小,其前景被广泛看好,但当前技术尚不成熟,尚处于研究阶段[2,3]。
本文以永磁同步电机驱动的电动汽车为研究对象,提出一种对系统参数及外部负载变化具有强鲁棒性的滑模速度控制策略,并通过仿真对该方案与传统PI 控制进行对比,验证该方法的有效性。
2 电动汽车用PMSM的数学模型为了便于分析PMSM机的特性,对其如下假设[74]:(1)忽略磁路饱和、磁滞和涡流损耗;(2)电机三相绕组对称分布情况理想,轴线互差120°电角度;(3)电机定子电动势按正弦规律变化,定子电流在气隙中只产生正线分布磁势,忽略磁场磁路中的高次谐波磁势。
电气子系统为:(1)机械子系统为:(2)式中:、、、、和分别为dq轴电压、电流和电感;表示电机的等效电角速度;表示定子电阻;为永磁体磁链;表示电磁推力;表示等效负载转矩;为极对数;为转动惯量;为静态摩擦系数。
3. 滑模速度控制器设计由于采用的控制策略可以很好地实现电机磁链和电流的解耦,因此本文仍采用该策略,且电流环仍采用传统PI控制,这里仅对速度环进行设计。
132 10.16638/j.cnki.1671-7988.2019.02.045 基于MATLAB的轮毂电机驱动电动汽车的 平顺性研究
张丽萍,李勇凯,李争鹏 (辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001) 摘 要:轮毂电机驱动技术是一种比较新颖的应用到电动汽车的驱动方式,作为新型能源汽车的一种,轮毂电机驱动车辆具有零尾气排放、传动结构简单高效、动力输出可控等诸多优点。但因轮毂电机的存在导致非簧载质量增加且电机激振力明显,导致电动车的舒适性差,操纵稳定性恶化。文章运用1/4电动车模型,应用频域分析法和时域分析法通过仿真分析振动系统在非簧载质量增加和电机运转时转矩波动引起的垂向激振力对车辆平顺性的影响。 关键词:轮毂电机;电动汽车;平顺性 中图分类号:U469.7 文献标识码:A 文章编号:1671-7988(2019)02-132-05
Study on Smooth of Electric Vehicle Driven by Hub Motor Based on MATLAB Zhang Liping, Li Yongkai, Li Zhengpeng ( Liaoning University of Technology School of Automobile and Transportation Engineering, Liaoning Jinzhou 121001 )
Abstract: Hub motor drive technology is a relatively novel driving method applied to electric vehicles. As a new type of energy vehicle, hub motor drive vehicles have many advantages such as zero exhaust emission, simple and efficient transmission structure, and controllable power output. However, due to the existence of hub Motors, the non-reed load quality increases and the motor excitation force is obvious, resulting in poor comfort and deterioration of operating stability of electric vehicles. This paper uses 1/4 electric vehicle model, frequency domain analysis method and time domain analysis method to analyze the influence of vertical vibration force on vehicle smoothness caused by vibration system in non-reed load quality increase and torque fluctuation during motor operation. Keywords: hub motor; Electric vehicles; Smooth CLC NO.: U469.7 Document Code: A Article ID: 1671-7988(2019)02-132-05
引言 随着世界范围内汽车保有量不断增加和工业生产的迅速发展,资源消耗和空气污染等问题日益严重,未来大力发展新型能源汽车是解决环境污染与能源危机的有效方法[1]。电动汽车以其如下优点而备受重视,车辆在使用过程中零污染(或超低污染)、能源利用更加多元高效,以及有利于实现智
能化控制等多方面的技术优势。当前新能源汽车在世界范围内呈现加速发展态势。按照车辆提供驱动力的方式不同,可以将电动汽车大体上分为两类,即集中电机驱动和轮毂电机驱动电动汽车。轮毂电机驱动相比于集中电机驱动电动汽车布局更加合理、空间利用充分、能量便于回收等特点,轮毂电机驱动技术具有很好的发展和实际应用前景[2]。作为电动汽车未来技术发展的一个重要方向,轮毂电机驱动技术是当前国内外发展研究的重点和热点之一。由于新型的驱动形式和特殊的结构布局,加剧了车辆的垂向振动,导致了车辆的作者简介:李勇凯,就读于辽宁工业大学。 张丽萍 等:基于MATLAB的轮毂电机驱动电动汽车的平顺性研究 133 平顺性和操纵稳定性变差。本文轮毂电机选择开关磁阻电机,主要从非黄载质量增加和电机运转时产生的转矩波动两个方面对车辆垂向振动的影响进行研究[3]。
1 路面输入模型 轮毂电机驱动电动汽车行驶时,路面输入是系统的主要激励,对电动汽车进行平顺性分析时,首先研究路面输入。采用功率谱密度法,推导路面输入的时域模型,国际上常采用式(1)来表示路面功率谱密度Gq(n):
(1) (2) (3) 式中n为空间频率;n0=0.1m-1为参考空间频率;w为频率指数,通常w=2;Gq(n0)为路面不平度系数。f为时间频率,
u为车速。路面等级分为八个等级,B、C级路面在城市中较为常见。采用理想单位白噪声输入,为了更准群的得反映路面的实际情况,我们引入下截止频率(n00,取0.01)式(1)、
式(2)、式(3)经过推导变换可以得出路面输入的时域表达式为: (4) q(t)—路面随机不平度位移;w(t)—均值为0和功率谱密度是1的高斯白噪声[4]在Simulink中建立单轮随机路面输入仿真模型如图1所示。
图1 单轮随机路面输入仿真模型 针对轮毂电机驱动电动汽车行驶路况的大致情况,本文选用路面不平度8级分类中的B级路面进行研究,B级路面的不平度系数为 ,车速取为30km/h,仿真可得B级路面输入谱,如图2所示。
图2 B级路面输入谱
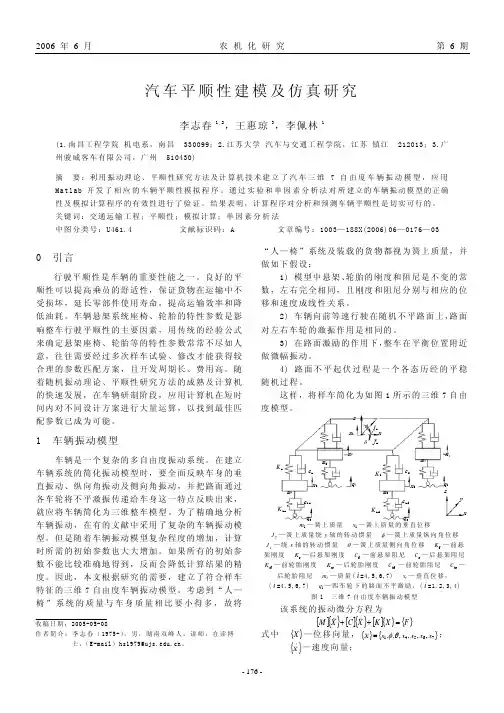
2 轮毂电机驱动电动汽车1/4汽车模型 选择8/6极开关磁阻电机作为轮毂电机,电机激励F(t)是由轮毂电机运转时由于转矩波动产生的,它是由电机的切向力和径向力在竖直方向的分力两部分组成[5],如图3所示。
图3 电机径向力、切向力在竖直方向的合力 轮毂电机的径向力和切向力经过一系列的推到变换,得到电机激励F(t)的等式:
(5) 这里b为极对极时气隙长度lg的最短距离;转子半径r=R-b,φ为转子初相角,通过控制各相绕组的接通与断开顺序来控制电机的旋转方向,通过控制绕组中电流的大小和开通和断开角度来控制电动机的转速,进而影响电机激励的大小。具体参数如表1所示: 表1 四相8/6极开关磁阻电机参数
仿真模型搭建过程:依据电机激励F(t)的方程式在Matlab中进行编程,应用plot函数得电机激振力在时间域内的图像,如图4所示。
图4 电机激励F(t) 在假设悬挂质量分配系数ε=1,轮毂电机驱动电动汽车实际结构左右对称且左右车辙的不平度函数相等的情况下,轮毂电机驱动电动汽车简化为四分之一车两自由度振动系汽车实用技术 134 统,如图所示。此系统较集中驱动系统增加了电机激励F(t),即系统含两个输入:路面输入q、电机激励F(t);两个输出:车轮位移z1,车身位移z2。
图5 四分之一轮毂电机驱动电动汽车的二自由度模型 对图5所示的振动系统模型,应用拉格朗日方程,得到系统的运动方程为:
(6) 经整理得:式中,
车辆具体参数如表2,为单轮1/4车辆参数。 表2 单轮1/4车辆参数表
将路面激励和电机激励一同作用下的输入作为振动系统的激励,建立相对应的四分之一轮毂电机驱动电动汽车的二自由度simulink模型。如图5所示。
图5 ‘路面+电机’双激励下时域仿真Simulink模型 汽车平顺性分析常采用车身垂向加速度、悬架动挠度z2-z1以及能反映行驶安全性的车轮动位移z1-q综合评价车辆的行驶平顺性。
3 轮毂电机对垂向振动的影响 对于轮毂电机驱动电动汽车,其垂向振动的来源除了不平路面的输入激励外,还有来自轮毂电机因转矩波动产生的电机垂向激振力。因为轮毂电机的引入使得非簧载质量增加,加剧了车辆的垂向振动,导致了车辆平顺性变差。作为系统参数,非簧载质量的变动会影响振动系统的频率响应特性。通过将轮毂电机驱动电动车与集中电机驱动电动车进行频域对比分析,说明非簧载质量变大对车辆垂向振动的影响。和应用线性叠加原理,分析振动系统在时间域内路面和电机双激励情况下的响应情况。 3.1 振动系统响应特性对比分析 集中电机驱动电动汽车非簧载质量包括车轮、转向机构、制动机构和悬架杆系等部分,而对于轮毂电机驱动电动汽车,这部分质量还包含轮毂电机质量。采用集中驱动电动汽车和轮毂电机驱动电动汽车作为对比,假定簧载质量相同,研究电动汽车因引入轮毂电机而使非簧载质量增加,对车辆垂向振动的影响。 图6为集中电机驱动四分之一车模型。图中,m2+m3为簧载质量(车身质量+驱动电机质量);m1为非簧载质量(车轮质量);K为弹簧刚度;C为阻尼系数;Kt为轮胎刚度。
图6 四分之一集中电机驱动电动汽车的二自由度模型 其运动方程为:
(7) 自由振动即无阻尼时,方程变为:
(8) 由方程式(8)可以得出车身部分固有圆频率;
车轮部分固有圆频率为。 1/4车双质量振动系统的固有频率表达式如下[6]:
(9) 由上述公式可以得出低频共振的车身型振动和高频共振的车轮型振动。 3.1.1 系统传递特性和幅频特性 将有关各复振幅代入式(7),处理得系统各传递函数: