轮毂电机驱动电动汽车电子差速系统研究
- 格式:pdf
- 大小:1.08 MB
- 文档页数:6
轮毂电机驱动车辆的差速控制模型研究一、电子差速原理介绍传统意思上的电子差速的基础是线控转向系统,主要指基于四轮线控转向技术的电子差速功能。
电子差速是一种全新概念的汽车电子转向系统。
它取消了差速器等机械结构,只是接收转向控制指令,使用电子线路控制转向时内外车轮之间的速度差,实现转向。
电子差速控制系统,完全摆脱了传统转向系统的各种限制,不但可以自由设计汽车转向的力传递特性,而且可以设计汽车转向的角传递特性,给汽车转向特性的设计带来无限的空间,是汽车转向系统的重大革新。
(1)动力控制的硬件连接改为软连接形式,通过电子线控技术,实现各电动轮从零到最大速度的无级变速和各电动轮间的差速要求,从而省略了传统汽车转向所需的机械式操纵换档装置、离合器、变速器、机械差速器等部件,既方便了操作又使底架结构大为简化,使整车总布置和车身造型设计的自由度大大增加。
(2)可以自由设计汽车转向的力传递特性和角传递特性,给汽车转向特性的设计带来无限的空间。
(3)容易实现各电动轮的电气制动、机电复合制动和能量回馈制动,节约能源。
本文主要研究的是前轮仍采用传统转向结构,而后轮采用轮毂电机驱动的情况,主要目的是实现后轮的电子差速功能,以配合驾驶员通过转向系统输入的转向信号,实现转向功能,避免后轮轮胎过渡磨损,保证整车的操控性能。
因为仅在后轮使用轮毂电机,其控制方法与四轮都采用轮毂电机会有所不同,最显著特点是四轮轮毂电机可以直接通过线控转向系统中的转角信号计算出理论上需要的差速量,并通过对四轮的转速控制实现,但是仅在后轮使用轮毂电机,转向信号从方向盘输入,很难直接通过方向盘信号计算出准确的后轮需要的差速量,需要全新的控制策略。
这就是本文所主要研究的内容。
二、电动机原理及数学模型1、轮毂电机驱动系统的特点轮毂电机驱动系统作为一种新兴的电机驱动方式,其布置非常灵活,可以根据车辆驱动方式分别布置在电动汽车的两前轮、两后轮或四个车轮的轮毂中。
与内燃机汽车和其他驱动型式的电动汽车相比,轮毂电机驱动式电动汽车在动力源配置、底盘结构等方面有其独特的技术特征和优势,具体体现在以下几方面:①动力控制由硬连接改为软连接型式,通过电子线控技术,实现各电动轮从零到最大速度的无级变速和各电动轮间的差速控制,省略了传统汽车所需的机械式操纵换档装置、离合器、变速器、传动轴和机械差速器等,使得驱动系统和整车结构简洁、有效利用空间大、传动效率提高。
轮毂式电动汽车电子差速复合控制方法随着电动汽车技术的不断发展,轮毂式电动汽车作为一种新兴的驱动方式逐渐受到人们的关注。
这种驱动方式通过电动机直接驱动车轮,摆脱了传统汽车中的传动系统,从而具备了更高的效率和动力输出。
然而,由于轮毂式电动汽车的工作方式与传统汽车有所不同,特别是在差速器控制方面存在一些挑战。
因此,研究轮毂式电动汽车电子差速复合控制方法成为了重要的课题。
一、电子差速的原理和作用在传统的汽车中,差速器的作用是平衡车轮转速差异,使得在转弯等情况下两个驱动轮能够保持合适的转速,并提供车辆稳定性和操控性。
然而,在轮毂式电动汽车中,每个车轮都被电动机直接驱动,差速器的作用被电子差速系统所取代。
电子差速系统通过电控单元感知车轮速度和转向角度等信息,实时计算每个轮子的电机输出扭矩,从而实现差速控制。
通过精确控制每个轮子的扭矩输出,可以使车辆在转弯等情况下保持平稳,并提高车辆的操控性能。
二、电子差速复合控制方法1. 轮毂电机扭矩分配控制方法轮毂电机扭矩分配控制方法是电子差速复合控制方法中的核心。
该方法通过对每个轮子的电机输出扭矩进行控制,实现差速控制。
具体而言,可以通过根据传感器获取的数据计算每个轮子的实时速度、转向角度和车辆的状态等信息,然后利用反馈控制算法,计算出每个轮子应该输出的扭矩。
2. 扭矩向量控制方法扭矩向量控制方法是电子差速复合控制方法的一种重要扩展。
该方法通过给每个轮子分配不同大小和方向的扭矩,实现灵活的差速控制。
通过精确分配扭矩,可以使车辆在不同路况下获得最佳的牵引力和行驶稳定性。
3. 动态差速控制方法动态差速控制方法可以根据车辆的实时工况和路况情况,动态调整差速控制策略。
通过对传感器获取的数据进行实时处理,可以根据车辆的状态和驾驶员的需求,调整差速控制参数,从而保证车辆的稳定性和操控性能。
三、应用和前景展望轮毂式电动汽车电子差速复合控制方法的研究在实际应用中具有重要意义。
通过合理选择和设计差速控制策略,可以提高电动汽车的操控性、节能性和安全性。
轮毂电机应用与四轮驱动及电子差速的关系鉴于轮毂电机在电动汽车上应用的诸多优点。
但由于轮毂电机受轮毂内结构体积限制,按汽车驱动功率要求批量生产大功率轮毂电机有相应难度,而采用四轮驱动即可实现小马拉大车,通过四轮毂电机并联驱动即可比二轮毂电机驱动提高汽车总驱动力1倍。
并根据汽车理论分析只有四轮驱动才能充分利用车重产生的地面附着力,以此提高汽车行驶的稳定性及车辆越野通过性。
随着汽车材料技术的发展,需采用轻型材料来减轻车载自重,减小能耗,提高功效;并随着汽车高速行驶技术发展,对提高汽车行驶稳定性等性能指标将提出更高要求。
因此也更需采用四轮毂电机驱动来提高汽车对地面的附着力。
又由于只有驱动轮才能实现制动能量的回收,采用四轮毂电机驱动并结合兼有电动、发电回馈和电磁制动多功能的电动汽车轮毂电机技术,即可极大地提高汽车在降速制动和下坡时对动能能量的回收,以节能和提高续驶里程。
所以轮毂电机的应用将使电动汽车由性能更好的四轮驱动替代两轮驱动。
为满足驱动轮差速要求有采用机械差速和电子差速两种。
机械差速是传统汽车普遍采用的方法,其机构庞大而复杂。
而电子差速系统EDS是采用电子控制的方式来实现,有诸多优点,它与轮毂电机的应用如同一对比翼鸳鸯,即左右侧驱动轮采用轮毂电机必须通过电子差速来控制,而轮毂电机的应用又使电子差速控制变得很容易。
综上所述汽车采用四轮驱动结合四轮转向将具有诸多优点,尤其对于电动汽车采用轮毂电机驱动来说,与传统汽车相比使汽车实现四轮驱动方式变得很容易。
而且结合用直线步进电机控制转向力的汽车转向系统,能更容易地实现全面改善转向性能的四轮转向系统。
而现有汽车仅采用四轮驱动或四轮转向的单一方式其结构都相当复杂,而由两者相结合的方式至今还没有,更没有同时采用电子差速转向控制等多项技术相组合的实施方案。
虽有报道四轮驱动采用常规二轮转向的电子差速转向控制技术。
但随着汽车控制技术发展及其性能要求的提高,特别是电动汽车采用轮毂电机技术的成熟,电动汽车用四轮毂电机驱动实现四轮转向的电子差速转向控制系统技术也将被要求得以解决。
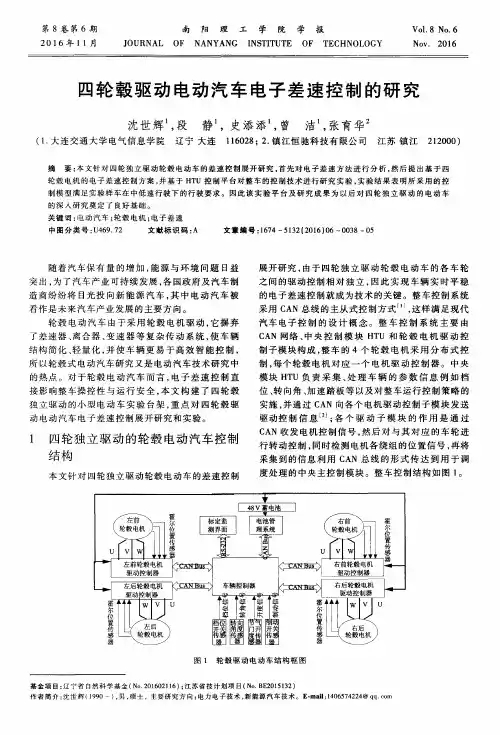
10.16638/ki.1671-7988.2020.06.009纯电动汽车电子差速系统研究综述王鹏,陶小松,曹晓玉(长安大学汽车学院,陕西西安710064)摘要:文章综述了纯电动汽车的驱动结构以及轮毂电机驱动电动汽车的优点,然后阐述了纯电动汽车电子差速系统的结构与工作原理,并详细介绍了电子差速系统的控制方法和控制理论,同时对三种控制方法进行了对比分析,指出其优缺点和适应场合。
最后对纯电动汽车电子差速的发展进行了展望。
关键词:电动汽车;电子差速;控制策略;轮毂电机中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2020)06-27-04An Overview of Electronic Differential System for Pure Electric VehiclesWang Peng, Tao Xiaosong, Cao Xiaoyu( School of Automobile, Chang'an University, Shaanxi Xi'an 710064 )Abstract:Article summarizes the pure electric vehicle drive structure and the advantages of the wheel hub motor drive electric vehicle, and then expounds the pure electric vehicle electronic differential system structure and working principle of and the electronic differential system are introduced in detail the control method and control theory, at the same time analyzed the three kinds of control methods, points out its advantages and disadvantages and to adapt to the situation. Finally, the development of electronic differential speed of pure electric vehicle is prospected.Keywords: Electric vehicles; Electronic differential; Control strategy; Wheel hub motorCLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2020)06-27-04引言随着我国新能源汽车的迅猛发展,纯电动汽车因其节能、环保等优势成为新能源汽车的重要发展方向[1]。
基于轮毂电机的电动车电子差速转向控制系统的研究的开题报告一、选题背景及意义随着环保意识的不断增强,电动车以其零排放、节能环保的特点成为现代车辆的重要形式。
然而在电动车的运行中,差速控制是一个重要的问题。
由于电动车的驱动方式不同于传统的内燃机驱动,电动车驱动单元多采用轮毂电机的形式,相较传统驱动模式的不同点在于直接利用轮胎与发动机之间的摩擦力来驱动轮胎。
同时在运行过程中,频繁的转向操作导致轮胎损耗、制动增强,这一问题需要进行差速控制。
因此,电动车电子差速转向控制系统的研究具有重要意义,能够提高电动车的安全性和稳定性,也进一步推动了电动车技术的发展和应用。
二、研究内容和方法本文旨在设计一种基于轮毂电机的电动车电子差速转向控制系统,研究方案如下:1. 确立电动车电子差速转向控制系统的原理框架,建立理论模型。
2. 结合轮毂电机的特点,设计合适的控制策略,实现差速控制和转向控制。
3. 建立控制系统仿真模型,优化控制算法,对模型进行验证和分析。
4. 建立实验样机,通过测试数据进行结果分析和验证。
5. 对研究结果进行总结和讨论,探讨电动车电子差速转向控制系统在未来发展的方向和应用。
三、研究预期成果本研究预期达到以下预期成果:1. 建立基于轮毂电机的电动车电子差速转向控制系统模型,深入探究差速控制和转向控制。
2. 针对电动车电子差速转向控制系统的特点,提出全新的控制策略,实现优异的差速控制和转向控制性能。
3. 通过仿真模型和实验样机对电子差速转向控制系统进行验证和性能测试,实现系统的实际应用。
4. 对研究成果进行探究和总结,探讨电动车电子差速转向控制系统在未来发展方向。
四、可行性分析本研究采用基于轮毂电机的电动车电子差速转向控制系统,基于已有的理论和技术,具有可行性和可实现性。
目前轮毂电机技术取得了较大的进步,能够满足较高的性能需求,而在控制算法方面,基于神经网络、PID控制等已经有较为成熟的应用。
同时,现有的差速控制、转向控制等相关技术研究已经为本研究提供了技术保障。
两轮毂电动机小车电子差速系统研究摘要:通过对电机驱动理论及传统电子差速方法进行分析,对无线跟随小车提出了基于两轮毂电动机驱动的电子差速系统设计并给出了控制器总体设计思路。
建立小车电子差速转向模型,计算电差速过程中随着转向角度变化内外车轮的转速,同时对小车匀速前进、加减速运行等状态下的电子差速模式进行分析,确定具体运行状态下的控制策略。
对两台55w的四对极电机进行了仿真分析和空载实验。
实验结果表明,小车控制器设计合理,电子差速模型正确,控制策略可行。
关键词:电子差速;无刷直流轮毂电动机;控制策略0引言电子差速(以下简称ED)是一种完全用电控方式控制各个车轮的转速,使车轮以不同速度转动,以达到转向的目的,同时保证车轮不发生滑动或者滑移,作纯滚动运行的技术。
在无线跟随小车的转向系统中采用电子差速控制系统,取消了转向盘和转向车轮之间的机械连接,接收转向控制指令后,使用电子线路控制内外车轮之间的速度差,实现转向。
对于电机驱动控制系统,目前经常采用驱动电机与减速器相连再带动车轮的方式,车轮速度的计算必须通过对一系列减速器的减速比计算,才能得到和电机转速之间的关系。
这种复杂的计算方法对于无线跟随小车丧失了电子控制的实时性,如果电机转速和车轮转速能够保持实时一致,电子差速的功能就可以得到最好的体现。
为了提高小车跟随的灵活性和运行效率,同时基于能量传递效率和车体空间限制等考虑,本文采用两轮毂电动机驱动方式,电动机安装在车轮的轮毂内,输出转矩直接传输到车轮,舍弃了传统的离合器、减速器、传动桥、差速器等机械部件,使整车重量减轻,降低了机械传动损耗[1-2]。
直接使用轮毂电动机提供转向动力,同样功率要求时,驱动功率可以由多个电动机提供,降低了单个驱动电动机的功率,进而降低对功率器件的要求;可以对各个驱动电机进行单独控制,有利于提高小车的操纵性和稳定性。
本文在已经设计完成的无线跟随小车样车基础上研究电子差速问题,设计了电机驱动和电子差速控制器。
基于再生制动的四轮毂电机独立驱动电动汽车差速转向控制研究随着科技的不断发展,汽车的技术也在不断地更新换代。
电动汽车成为新一代汽车的主要发展方向,再生制动技术也成为电动汽车行业的重要技术之一。
针对传统的四轮驱动电动汽车,研究者们提出了采用四轮毂电机独立驱动的电动汽车,借助再生制动技术实现差速转向控制。
四轮毂电机独立驱动的电动汽车是指将电动汽车的驱动电机集成到车轮中,即为每个车轮都安装一台电机,使得每个车轮都能够独立驱动。
这种结构有助于提高车辆的能量利用效率和功率输出效率,同时也能够提高汽车的马力和加速性能。
再生制动技术是指将汽车制动时产生的能量通过电机转化为电能储存起来,在车辆行驶时供电使用。
再生制动技术可以降低车辆的能量浪费,从而提高车辆的续航里程。
再生制动技术对于四轮毂电机独立驱动的电动汽车来说,也是非常重要的。
由于每个车轮都有独立的电机,因此可以对每个车轮的电机进行独立的再生制动控制,从而提高制动能效并减少电池的充电时间。
此外,再生制动技术还可以用于差速转向控制。
在传统的汽车中,差速器起到了平衡左右车轮输出扭矩的作用,但在电动汽车中,由于每个车轮都有独立的电机驱动,因此可以通过控制每个车轮的输出扭矩实现差速转向控制。
通过再生制动技术的应用,可以实现差速转向控制并减少能量浪费,从而提高汽车的性能和续航里程。
四轮毂电机独立驱动的电动汽车结合再生制动技术可以改变传统汽车转向机构的复杂性,提高驾驶操控性能和安全性。
综上所述,再生制动技术和四轮毂电机独立驱动技术在电动汽车领域都是非常重要的技术。
它们可以提高汽车的能源利用效率和驾驶性能,同时也可以减少能量浪费和提高续航里程。
在未来的发展中,这两项技术将持续发挥重要作用,推动电动汽车技术不断进步。
四轮毂电机独立驱动的电动汽车结合再生制动技术可以实现智能化控制,提高车辆的安全性和驾驶舒适性。
通过传感器对车辆的速度、方向、加速度等数据进行实时监测和反馈,可以对每个车轮的输出扭矩进行精确控制,从而实现更加灵活、稳定和安全的驾驶体验。
基于FlexRay总线的轮毂电机差速控制研究的开题报告一、研究背景和意义随着人类对汽车安全和驾驶体验需求的提高,电动车辆的应用越来越广泛。
轮毂电机(Hub Motor)作为一种新型的电动驱动技术,以其特有的优势(如高效、低噪音、空间利用率高等)而备受关注。
然而,轮毂电机系统中由于左右轮毂电机间的传动部件被省略,因此会产生差速效应,给车辆操纵和行驶安全带来一定的不确定性。
因此,轮毂电机差速控制问题就显得尤为重要。
FlexRay总线作为一种新型的实时通信协议,具有高速、高性能、高可靠性等优点,被广泛用于汽车领域。
研究基于FlexRay总线的轮毂电机差速控制,有助于提高轮毂电机系统的稳定性和安全性,充分发挥轮毂电机的优势,有利于推动电动汽车的发展。
二、研究内容和方法本论文将针对基于FlexRay总线的轮毂电机差速控制进行深入研究。
研究内容包括:1. 车辆动力学建模及差速原理分析2. 基于FlexRay总线的系统架构设计3. 轮毂电机差速控制算法设计与优化4. 系统仿真与实验验证研究方法采用理论分析、仿真验证和实验测试相结合的方式,通过建立相关数学模型和仿真平台进行算法设计和优化,并在实际的轮毂电机系统中进行实验验证。
三、预期成果和意义预期成果包括:1. 建立基于FlexRay总线的轮毂电机差速控制算法的系统框架和理论模型;2. 轮毂电机差速控制算法设计与实现,提高轮毂电机系统的稳定性和安全性;3. 系统仿真和实验测试结果分析,验证算法的性能和可行性。
本研究的成果将在电动车辆领域具有重要实用价值,能够提高轮毂电机系统的性能和可靠性,促进电动汽车技术的发展和推广。
电动汽车电子差速控制策略研究作者:陈阁李翔翼赵地来源:《时代汽车》2022年第06期摘要:轮毂电机相较于传统电机,具有响应速度快、能量转化率高等优点。
为了保证电动汽车的安全性,使用轮毂电机驱动的汽车去掉了变速器等机械结构。
本文使用仿真MATLAB软件建立动力学模型来进行汽车的差速研究。
并且使用CARSIM软件进行汽车参数的建模,使得到的实验结果尽可能准确。
然后使用PID调节器控制电流,其中采用电磁力矩方程和电压方程。
车辆动力学模型分两步建立,电动车相关参数输入软件进行建模。
采用电子差速控制和直接橫摆控制两种控制方式。
仿真和试验结果表明,这两种控制方式在低速下具有较好的控制效果。
关键词:轮毂电机 MATLAB 建模1 引言随着汽车工业的发展,燃油汽车不仅给人们带来了舒适的体验,但同时也带来了许多环境问题,在这个大背景下,电动汽车被研究出来。
在机械结构变化的基础上,必须保证电子差速器系统的安全性和可靠性,这是电动汽车安全的前提。
考虑到车辆扭矩中心偏差对车轮载荷垂直传递的影响,分析了牵引质量驱动力和车身偏差对车轮载荷垂直传递的影响。
利用CARSIM软件建立动态模型,利用SIMULINK软件确定控制策略,最后对系统进行总体仿真。
传统的阿克曼建模仿真有很多学者进行相关的探索。
但是这个模型局限性很大,它只能在线性时不变的系统模型中应用。
如果要探究速度快的车辆模型,就需要再针对其他干扰因素作出更深一步的研究。
2 电动汽车电子差速控制策略研究2.1 电动汽车转向动力学模型2.1.1 多自由度汽车动力学模型车辆的动态转向性能是指车辆在驾驶员对方向盘进行输入的情况下的响应,评价标准是车辆是否能够根据驾驶员的意图,在方向盘角度输入下,通过一系列转向机构改变方向盘角度,本文研究的电动问题与车辆的行驶稳定性有关,下面就可以对汽车的七自由度模型进行建立。
如图1所示。
在建模时,本文采用了MATLAB中的simulink和CARSIM这两个建模仿真软件。