孔组位置度的测量和计算
- 格式:pdf
- 大小:86.84 KB
- 文档页数:2
位置度∮t:(每个)被测轴线必须位于直径为公差值∮t,由以对于基准的理论正确尺寸所确定的理想位置为轴线的圆柱面内。
例法兰螺钉孔位置度:(1)用V型铁支承距离最远两端主轴颈(A-B),将螺纹检轴紧密旋入螺纹孔中,曲轴销孔中心旋转至X(水平)方向,用带有杠杆百分表的高度游标卡尺,将基准中心调整至等高(同时,将位置度检具某一平面调整水平后,固定)。
分别测量各螺纹检轴中心线与基准中心线在X(水平)方向的误差值即:Fx。
曲轴销孔中心旋转至Y(垂直)方向(同时位置度检具原垂直面为水平),此时测量各螺纹检轴中心线与基准中心线在Y方向的误差值即:Fy。
位置度误差为:ΔF=2(Fx2+ fy2)1/2。
(2)用V型铁支承距离最远两端主轴颈(A-B),将螺纹检轴紧密旋入螺纹孔中,曲轴连杆轴颈基准(C)旋转至X(水平)方向,用带有杠杆百分表的高度游标卡尺,将基准中心调整至等高(同时,将位置度检具某一平面调整水平后,固定)。
分别测量各螺纹检轴中心线与基准中心线在X(水平)方向的误差值即:Fx;曲轴连杆轴颈基准(C)旋转至Y (垂直)方向(使位置度检具原垂直面为水平),此时测量各螺纹检轴中心线与基准中心线在Y(垂直)方向的误差值即:Fy。
螺纹孔位置度误差为:ΔF =2(Fx2+ Fy2)1/2。
取各螺纹检轴位置度误差最大值,作为评定的依据。
例定位销孔位置度1、大柴:(1)销孔对基准平面的位置度(水平方向): 用V型铁支承距离最远的两个主轴颈(A-B)且调至等高,把检轴紧密插入销孔,慢慢调整曲轴,用带有杠杆百分表的高度游标卡尺将基准轴线调至等高后(同时,将位置度检具水平方向平面调整等高后,固定)。
测量销孔中心与基准轴线高度差的二倍,即为销孔位置度误差。
(2) 销孔轴线对主轴颈轴线的位置度(垂直方向):用V型铁支承距离最远的两个主轴颈(A-B)且调至等高,把检轴紧密插入销孔,慢慢调整曲轴,连杆轴颈基准(C)调整至 Y (垂直)方向(即位置度检具原垂直面为水平),并用带有杠杆百分表的高度游标卡尺,测量销孔中心线到基准轴线的数值与理论正确尺寸之差的二倍。
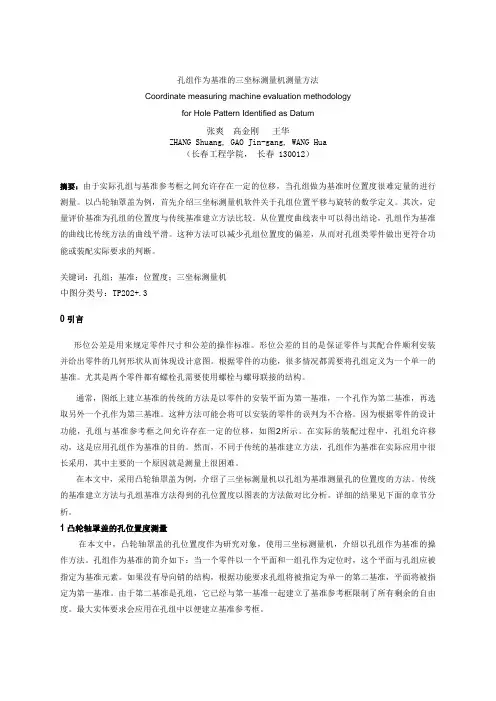
孔组作为基准的三坐标测量机测量方法Coordinate measuring machine evaluation methodologyfor Hole Pattern Identified as Datum张爽高金刚王华ZHANG Shuang, GAO Jin-gang, WANG Hua(长春工程学院,长春 130012)摘要:由于实际孔组与基准参考框之间允许存在一定的位移,当孔组做为基准时位置度很难定量的进行测量。
以凸轮轴罩盖为例,首先介绍三坐标测量机软件关于孔组位置平移与旋转的数学定义。
其次,定量评价基准为孔组的位置度与传统基准建立方法比较。
从位置度曲线表中可以得出结论,孔组作为基准的曲线比传统方法的曲线平滑。
这种方法可以减少孔组位置度的偏差,从而对孔组类零件做出更符合功能或装配实际要求的判断。
关键词:孔组;基准;位置度;三坐标测量机中图分类号:TP202+.30 引言形位公差是用来规定零件尺寸和公差的操作标准。
形位公差的目的是保证零件与其配合件顺利安装并给出零件的几何形状从而体现设计意图。
根据零件的功能,很多情况都需要将孔组定义为一个单一的基准。
尤其是两个零件都有螺栓孔需要使用螺栓与螺母联接的结构。
通常,图纸上建立基准的传统的方法是以零件的安装平面为第一基准,一个孔作为第二基准,再选取另外一个孔作为第三基准。
这种方法可能会将可以安装的零件的误判为不合格。
因为根据零件的设计功能,孔组与基准参考框之间允许存在一定的位移,如图2所示。
在实际的装配过程中,孔组允许移动,这是应用孔组作为基准的目的。
然而,不同于传统的基准建立方法,孔组作为基准在实际应用中很长采用,其中主要的一个原因就是测量上很困难。
在本文中,采用凸轮轴罩盖为例,介绍了三坐标测量机以孔组为基准测量孔的位置度的方法。
传统的基准建立方法与孔组基准方法得到的孔位置度以图表的方法做对比分析。
详细的结果见下面的章节分析。
1 凸轮轴罩盖的孔位置度测量在本文中,凸轮轴罩盖的孔位置度作为研究对象,使用三坐标测量机,介绍以孔组作为基准的操作方法。
位置度公差及其计算一、位置度公差注法的原理•在几何精度设计中,确定中心距是一个重要的方面。
•坐标尺寸注法存在着以下缺点:• 1.加工时产生累积误差;• 2.用两点法测量各个中心距不能保证坐标方向。
•位置度公差注法建立在由理论正确尺寸和几何图框给出的理想位置上。
见图6-1到6-5。
二、位置度公差的标注•单个要素在零件上的定位要求,可以根据基准体系和理论正确尺寸确定的理想位置标注位置度公差来实现。
•要素组在零件上的定位,要考虑该要素组的两种位置关系和两种设计要求。
• 1.孔组位置度公差标注应包含的两项主要内容u孔组的两种位置关系•(1)孔组内各孔的位置关系。
是指几何图框上各孔理想位置之间的关系,各孔之间保持定的坐标位置关系和几何关系。
(各孔位置度公差)•(2)孔组对零件上其他要素的位置关系。
是指孔组或孔组内各孔在零件上的定位要求。
(孔组位置度公差)二、位置度公差的标注u孔组的两种设计要求•(1)第一种设计要求。
装配时不仅要求被连接的两个零件上对应孔组内各孔的位置分别对准,而且要求这两个零件上的某些其他要素也应分别对准。
(对孔组和各孔的位置变动量都应规定较严格的位置度公差。
)•(2)第二种设计要求。
装配时仅要求被连接的两个零件上对应孔组内各孔的位置分别对准,而不要求这两个零件上的某些其他要素也分别对准。
(对各孔的位置变动量应规定较严格的位置度公差,而对孔组位置度公差或定位尺寸公差则应规定的较松。
)•孔组位置度公差与各孔位置度公差的关系:前者一定要不小于后者。
二、位置度公差的标注• 2.孔组位置度公差的基本标注方法u满足第一种设计要求的位置度公差注法•(1)矩形布置孔组。
图6-6。
二、位置度公差的标注•(2)圆周布置孔组。
图6-5。
二、位置度公差的标注• 2.孔组位置度公差的基本标注方法u满足第二种设计要求的位置度公差注法•(1)矩形布置孔组。
•①复合位置度公差注法:指将孔组的两种位置度公差分别用两个公差框格注出。
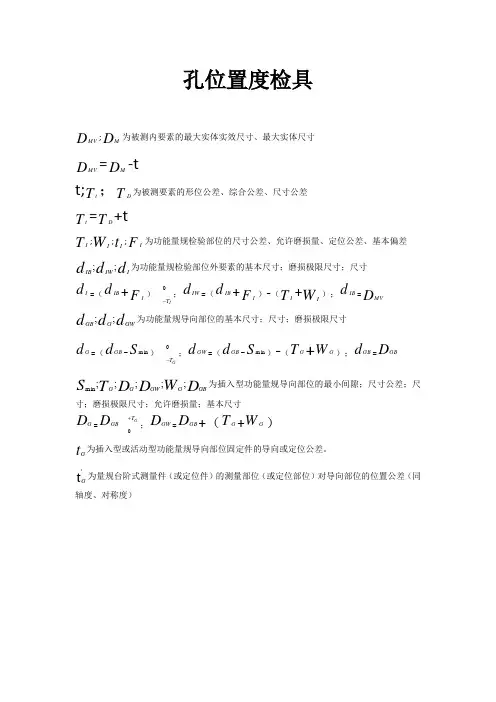
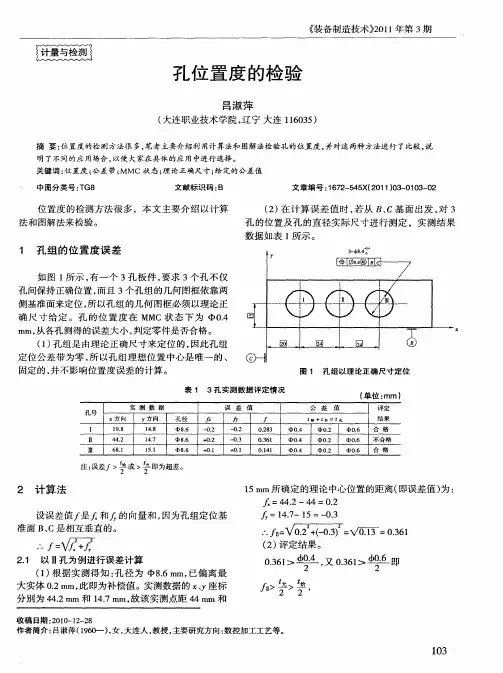
孔位置度检具
D MV ;D M 为被测内要素的最大实体实效尺寸、最大实体尺寸 D MV =D M
-t t;T t ;T D 为被测要素的形位公差、综合公差、尺寸公差 T t =T D
+t T I ;W I ;t I ;F I 为功能量规检验部位的尺寸公差、允许磨损量、定位公差、基本偏差 d d d I IW IB ;;为功能量规检验部位外要素的基本尺寸;磨损极限尺寸;尺寸 d I =(d IB +F I )0
I T -;d IW =(d IB
+F I )-(T I +W I );d IB =D MV
d d d GW G GB ;;为功能量规导向部位的基本尺寸;尺寸;磨损极限尺寸
d G =(d GB -S m in )0
G T -;d GW =(d GB -S m in )-(T G +W G );d GB =D GB
D W D D T S GB G GW G G ;;;;;min 为插入型功能量规导向部位的最小间隙;尺寸公差;尺寸;磨损极限尺寸;允许磨损量;基本尺寸 D G =D GB G
T +0;D GW =D GB +(T G +W G
) t
G 为插入型或活动型功能量规导向部位固定件的导向或定位公差。
t '
G 为量规台阶式测量件(或定位件)的测量部位(或定位部位)对导向部位的位置公差(同
轴度、对称度)。
孔位置度的解释
孔位置度指的是零件的孔的位置偏差的度量值。
在机械设计中,孔是一种常见的连接
和定位方法。
在制造和装配过程中,孔的位置偏差会影响零件的匹配和正确安装。
因此,
孔位置度是机械零件设计和制造过程中一个重要的质量控制指标。
孔位置度包括两个方面,一个是孔的偏差值,一个是孔偏差的位置。
孔的偏差值通常
使用直径、径向和轴向偏差等指标来表示。
其中直径偏差指的是孔的直径与理论值的差别。
径向偏差指的是孔中心与理论中心的距离差别。
轴向偏差指的是孔的顶部或底部对应面到
理论平面的距离差别。
孔位置度的位置偏差指标包括相对位置误差和绝对位置误差。
相对位置误差指的是孔
中心和理论中心之间的距离偏差。
绝对位置误差指的是孔中心与参考平面或其他主要特征
总体系的位置偏差。
孔位置度的测量方法有许多种。
在机床上,可以使用游标卡尺、游标测头、比测仪等
精密测量工具来实时监测孔位置度。
在难以到达的区域,可以使用激光扫描技术或三维测
量设备来测量孔位置度。
在制造过程中,为了控制孔位置度,常常采用以下方法:
1. 优化机床和工具的设计,保证加工过程中的精度和稳定性。
2. 严格控制材料的加工和热处理,以减少材料变形和损失。
3. 使用高精度加工和检测设备,以确保孔的质量和位置精度。
4. 实施全面、系统、严格的质量管理,从供应商到成品制造,确保孔位置度符合设
计要求。
法兰盘孔位置度计算方法法兰盘是一种常见的连接装置,用于连接两个轴或管道。
在安装过程中,准确测量法兰盘孔的位置度是非常重要的,因为孔的位置度直接影响到法兰盘的连接质量和安全性。
下面将介绍一种常用的法兰盘孔位置度计算方法。
我们需要准备一些测量工具,包括卡尺、角尺、测量卡等。
然后按照以下步骤进行测量:1. 定位法兰盘:将法兰盘放置在需要连接的轴或管道上,确保法兰盘的位置正确。
2. 测量法兰盘孔的直径:使用卡尺或测量卡测量法兰盘孔的直径,确保测量结果准确。
3. 定位法兰盘孔:使用卡尺或角尺测量法兰盘孔中心点到法兰盘边缘的距离,分别记为A、B、C、D。
确保测量结果准确。
4. 计算位置度:根据测量结果计算法兰盘孔的位置度。
位置度可以分为径向位置度和轴向位置度两种。
- 径向位置度:将A、B、C、D四个距离相加,再除以2,得到法兰盘孔的平均径向位置度。
- 轴向位置度:测量法兰盘孔中心点到法兰盘另一侧孔中心点的距离,记为E。
然后将E除以法兰盘孔的直径,得到法兰盘孔的轴向位置度。
确保计算过程准确无误,避免出现计算错误。
5. 判断位置度是否合格:根据设计要求或标准规定,判断计算得到的位置度是否符合要求。
如果位置度符合要求,则法兰盘孔的位置度计算完成;如果位置度不符合要求,则需要进行调整或重新测量。
以上就是一种常用的法兰盘孔位置度计算方法。
在实际操作中,需要注意以下几点:1. 测量工具的选择应准确可靠,以确保测量结果的准确性。
2. 在测量过程中,应注意避免因操作不当或力的施加不均匀而导致测量结果的误差。
3. 在计算位置度时,应严格按照规定的公式进行计算,避免出现计算错误。
4. 在判断位置度是否合格时,应根据具体的设计要求或标准规定进行判断,避免主观判断或误判。
5. 如果测量结果不符合要求,应及时进行调整或重新测量,以确保法兰盘连接的质量和安全性。
准确测量法兰盘孔的位置度是确保法兰盘连接质量和安全性的重要步骤。
通过采用合适的测量工具和正确的计算方法,可以准确地计算法兰盘孔的位置度,并根据计算结果进行相应的调整或重新测量。
三坐标测量位置度的方法及注意事项摘要:在汽车制造业中,对于每一个零部件都有着严格的质量要求。
为了满足装配性,很多零件都会在表面布满孔系,且这些孔系之间的位置尺寸以及位置度都是要严格符合标准。
因此对零部件进行位置度检测是十分必要的。
为了方便测量,在零部件的加工工序上编辑三坐标自动测量程序,提高了孔系位置的精度,也为各部门对于零部件生产的质量监控和设备调整提供了便利。
关键词:三坐标测量;位置度;方法;注意事项三坐标测量机是近40年发展起来的,它可以用来测量铸件、模具以及机械产品所生产加工出来的零部件等。
三坐标测量机的测量精度很高,效率很快,应用范围很广,无论是汽车、航空航天还是船舶等,所涉及的零部件,均有三坐标测量机工作的影子。
随着各机械行业的不断发展,对于零部件或模具的精度要求越来越高,对三坐标测量机精度需求的力度也越来越大。
1.三坐标测量机的结构和特点目前三坐标测量机的结构分为桥式结构和水平臂结构,桥式结构又分为固定和移动两种。
单边或者双边的高架桥结构,又称为龙门结构,这种大型的三坐标测量机将移动部分的结构进行了改进,通过只移动横梁来改进性能,以适应更大尺寸的测量。
①固定桥式结构三坐标测量机其封闭的框架结构有很强的刚性,且测量空间开阔,良好的稳定性能保证测量的精度。
固定桥式结构的三坐标测量机多被应用于测量轻重量的材料,体积较大,是一种精密型的测量机。
②移动桥式结构三坐标测量机与固定桥式结构测量机一样,测量空间也是较为开阔的,结构简单、工作台固定,与固定桥式结构测量机相比,承载能力要强,但三个方向运动相重叠,获取到的数据准确度就会较差,需要采取更多的措施来提高精度。
③水平臂结构三坐标测量机又被叫做“地轨式坐标测量机”,这种测量机结构简单,空间开阔,多被用于大型低精度物件的测量工作。
2.三坐标测量机的原理和方法三坐标测量机的工作原理是通过对零件进行坐标测量,将零件位置度的测量数据输入到三坐标测量机,再通过计算来获取其被测部件的尺寸大小、位置以及理论形状是否存在偏差,根据偏差情况来确定被测的零部件是否合格。
三坐标测量孔系位置度方法的实践摘要:现阶段,随着社会的发展,科学技术的发展也越来越迅速。
三坐标测量机(Coordinate Measuring Machining,简称 CMM) 20世纪 60 年代发展起来的一种新型高效的精密测量仪器。
目前,CMM已广泛用于机械制造业、汽车工业、电子工业、航空航天工业和国防工业等各部门,成为现代工业检测和质量控制不可缺少的万能测量设备。
随着科技的发展,三坐标测量机对测量精度的要求越来越高。
笔者根据多年工作经验,对影响三坐标测量机测量精度的因素与对策进行探讨。
关键词:三坐标测量;孔系位置度方法;实践引言随着我国工程测量行业的快速发展,各大高校纷纷开展“互换性与测量技术专业”,但是在开展三坐标测量机综合性实验教学的过程中,由于对实验的规范操作步骤以及实施考核细节并不完善,所以导致教学的效果不理想,为此必须要基于三坐标测量机的综合性实验设计与实践进行全面提升,提高学生对于测量理论三坐标测量机的深刻领悟。
同时针对高校服务社会的职能下,实现三坐标机多功能,从而服务社会。
关键词:三坐标测量机;综合性试验设计;多功能三坐标测量机作为最重要的测量机械设备,具有通用性强、自动化水平、高精度准确的特点。
通过对于在机械工程专业实验教学环节的三坐标测量机综合性实验改进,能够形成综合性、创新性为主体的实验教学,促进广大学生的学习和实践水平全面提升,并且也能够让学生更加积极主动的适应社会实践发展的需求。
一、三坐标测量机综合性实验的设计综合性实验涉及到许多的学科和三坐标测量机,通过对于综合性实验内容进行分析,可以有效的培养学生观察能力、思维能力。
1影响三坐标测量机测量精度的因素1.1机房环境的温度与湿度影响三坐标测量机测量精度的因素很多,其中最重要的因素就是温度问题。
每年进行一次的精度校正,并不能保证在温度变化的情况下测量机都能测量准确。
尤其是当季节变化时,机房的温度已与校验时不同。
当温度偏离太大时会对测量精度造成很大影响。
孔的定位精度如何计算公式
在工程领域中,孔的定位精度是一个非常重要的参数,它直接影响着工件的质
量和性能。
孔的定位精度通常用于描述孔的位置偏差,即孔中心与设计位置之间的偏差。
在实际工程中,我们需要通过一定的方法来计算孔的定位精度,以便评估工件的质量和性能。
孔的定位精度可以通过公式来计算,其中包括孔的直径、孔中心与设计位置之
间的距离以及孔的偏差。
下面我们将介绍孔的定位精度计算公式的推导过程和应用方法。
首先,我们需要定义孔的直径为D,孔中心与设计位置之间的距离为L,孔的
偏差为δ。
然后,我们可以利用这些参数来计算孔的定位精度。
孔的定位精度可以用以下公式来表示:
孔的定位精度 = δ / D。
其中,孔的偏差δ可以通过测量孔中心与设计位置之间的距离L来得到。
通常
情况下,我们可以使用测量仪器来测量孔的偏差,然后将其代入上述公式中进行计算。
在实际工程中,孔的定位精度计算公式可以帮助工程师评估工件的质量和性能。
通过计算孔的定位精度,我们可以了解孔的位置偏差情况,从而及时调整工艺参数,提高工件的质量和性能。
除了上述公式外,还有一些其他相关的计算公式可以用于评估孔的定位精度。
例如,我们还可以通过孔中心与设计位置之间的距离L来计算孔的偏差率,从而
更全面地评估孔的定位精度。
总之,孔的定位精度是一个重要的工程参数,它直接影响着工件的质量和性能。
通过合适的计算公式,我们可以准确地评估孔的定位精度,从而及时调整工艺参数,提高工件的质量和性能。
希望本文对孔的定位精度计算公式有所帮助,谢谢阅读!。

弓4—3
孔 呼 往置虚. 悼 寸军 0
概述
囊}囊拿囊} 囊}-}囊}囊}·e—譬囊}卡 · · · ·士.- -}
组位.置度的测量,和汁算
南通电机厂(226006) 孔组的位置度误差直接影响零部件的装配质量, 图l为4孔组零件,其孔组要素相互之间的关系由位 置度公差保证,而整组要素由线性尺寸公差定位,在 制造钻模和生产出 工件之后,对其位置度误差必须进 行检查,以确保零件质量。 按GBI¥58--¥0《形状和位置公差一检测规定》, 图1零件位置度误差测量方法是·以被测零件上最远 两孔的实际中心连线为一坐标轴,建立直角坐标系(见 图2),分别测量各孔的x-、了-值,将其与理论正确 尺寸比较,得l。、f,,而后用公式f= 2、,,f:+f≥计算 得各孔的位置度误差。用此方法测量和计算位置度时, 若以孔2、3的中心连线为x轴,则会得到另一位置度 误差值,这样出现了两个结果 甚至会出现两个相反 的结论,从而失去评判的唯二性。现介绍用定位最小 区域法来测量并计算其位置度。 .. 二、洲量原理及计算方法 位置度就是被测要素的实际位置偏移理想位置的 程度,理想l桩置相对于基准或几何图框确定.图1孔 组的理想图框位置并来固定,而在LI’L,尺寸公差内 浮动,这样就不能人为确定其测量和计算基准。定位 图1 徐嗣军秘秘
最小区域法是指按理想要素定位包容被测实际要素
时,具有最小宽度或直径机的包容区域,而符合最小
条件的理想要素是在掌握了被测要素的具体情况后才
确定。
测量时,用一直角尺置于工件表面上,位置基本
调整为相应孔中心连线与直角边平行,如图3,从直
角尺的两边建立辅助直角坐标系,用心轴无间隙地置
于孔中,分别测量并换算出AI、Bl,i=1、2、3、4
(测量吁直角尺不可移动),然后再换算·把4孔中
心换算成位于同一坐标系中,各点坐标为· , ’
l A。 2 A- s As—A · A·一A
Lyl=Bl ly2=BI—B Ly3=Bl:.B y‘=B·
根据定义,位置度即是能包容被测要素的最小直径的
圆。下面求作此圆,从几何角度分析,4点中必有3
点位于此最小直径圆上,这样以相偏离较远的3点相
互间作垂直平分线,以其交点为圆心.交点至3点的距
离为半径画圆,此圆能包容4点且为最小。当然作图
可能一次不成功,需换点重作,此圆直径即为所求。
然后进行翔定·若位置圆的直径小于或等于位置度公
差值机,则位置度合格,。当直径大于公差值时,因位
置度公差是按最大实体原则给定的,此原则规定·当
孔的实历 尺寸偏离最大实体状态尺寸时,其偏离量可
补偿给位置公差。作图比较,先画出位置度公差匾,
图2 图3
R ——精镗的瓦座孔半径
R ——半精镀的瓦座孔半径
可见,要求出hl应先求出 FOlO及 OOlN。
I-.
在AOION ̄,ZOO ̄N=
_fc
÷ ……(6)
且有I lOOlf=、,,II+b’.’
在AqolF中,按条弦定理-一
cosz?o。o=世
34一
R’+^’+b’一R¨
2R、,,^’+b’
即·绷-。…cos( )
(7)
将式(6)、(7)代入式(5)即可求出hl。
通过以上推导,得出了薄壁轴瓦定位沟工艺尺寸
驹7个计算式。在工艺、工装设计过程中使用较方便。
《机械工艺师》1996.№1
黍黍黍黍
侍 俺 静 珏
钰
孔~社粉 黍黍
维普资讯 http://www.cqvip.com
见图4,而后以此4点为圆心,各自的补偿量为直径
画圆(即补偿圆)。若所有补偿圆与公差圆相交或相 切(位于公差圆内的点不必补偿),则位置度合格, 反之,位置度不合格。 图4 至于孔组的线性定位尺寸误差,只需分别测量各 自的Ll、L 2值,并作判断。对于6孔组或其它多孔组 同样可采用此种方法测壹和计算。 三、用解析法计算位置度偏差 用几何法换算孔组位置度值,能直观地反映孔组 的位置情况,用作图法不够准确,有时还需反复作图。 由于孔组的理想位置事先不能确定,所以用计算法无 从进行。随着计算机的普及,下面用计算机来辅助计 算。 1.计算原理 同上建立直角坐标系并计算出各点坐标,需求解 出一圆能同时包容4点且直径最小,可以分析出此圆 心肯定在图5的方框之中,这样在方框之内求解圆心, 圆的解析式为f=2、/,(xl—x) +(yi-y)’(i 1、2、 3、4),对应于4组(xl,y1)有4个fCx,y)值,而 只有f 为直径的圆才能同时包容4点,进而在整个范 围内求出最小的f一值,即为所求。 图5 令e(x,y)=(xI—x)’+(yl—y)’(i 1、2、3、4), 当Y=yk时,zCx)=(xl—x)’+(yl—Yk)’(i=1、2、 3、4),对应4组lxI,yI)有4个E(x),求出E(x) , 可知E(x)一为一分段函数,如图6,解出xo ,e(x )一 即为y=Y'k时的最小值。计算x(x )一采用对x逐步逼 近法,从(xI)_开始,当出现e(xI)一>g(xI_1 1 时, 暂停计算即得结果为g(x2.I) l当总有E(x1) < 《机械工艺师》1995.№l g(x2一1)_时,计算至(il)一,得结果为g(x一)一。同 理,对应于x=x,时,E(y)m也为一分段函数 曲线形
状同上。函数e(x,y)为一抛物面,在整个定义域内为
连续函数,且存在一个极小值即最小值。由此可知,
在(x≤x;,y≤y;)区域内,函数E(x y)一连续,存在
极小值即为所求。在计算出e(x,yt)一之后,同理再
在y方向逐步逼近计算,求出最小的ZCx,y)。,得f(xo,
yo)一=2、/,E(xo,Yo)一,然后进行判断,若f(xo,yo)
≤t,则位置度合格l若f(xo,yo)一>t,同样先采用最
大实体原则补偿,如果f(xo,yo) ̄t-l-Dl—D(i=1、
2、3、4),则_位置度合格,反之位置度不合格,最后
打印结果。
图6
2.程序框图
综上所述,编制的程序框图见图7。
图7|
(j—l考文献‘)
35—
维普资讯 http://www.cqvip.com