位置度公差及其计算方法
- 格式:ppt
- 大小:923.50 KB
- 文档页数:47
位置度公差计算清晰
一、简介
二、精度公差的概念
精度公差指的是零件之间尺寸上的差异,它具有一定的规范性,标识零件之间的尺寸差异是否符合要求。
检测零件之间的尺寸差异,就需要按照规定的尺寸公差进行判断。
三、位置度公差的定义
四、位置度公差的分类
根据不同的尺寸特征,位置度公差可以分为总体位置公差和表面位置公差两种类型。
根据尺寸特征的不同,总体位置公差又可以分为普通公差和特殊公差,表面位置公差又可以分为均匀公差和微小公差。
五、位置度公差的计算
六、重要性。

1.基准﹔2.理論位置值﹔3.位置度公差三、位置度公差帶四、位置度的標注與測量方法3﹑以中心线左边第二根端子为例﹐测出实际尺寸D1(0.82)﹑D2(1.02)﹐根据位置度公差定义﹐DE=abs(Da-Dt)=abs{(D1+D2)/2-Dt)}=abs[(0.85+1.00)/2-0.90}]=0.025<0.05其中﹐DE表示实际偏差abs表示绝对值Da表示实际位置尺寸Dt表示理论位置尺寸﹐对于不同的端子﹐它们的理论位置尺寸是不同的﹐测量时测量者须自行计算﹐因为下面这种方法多了一次置中归零﹐置中归零不仅测量繁琐﹐而且会增加测量误差。
DE=abs(Da-Dt)=abs{(D1+D2)/2-Dt)}= abs{[(d1+ Dt) +( Dt-d2)]/2-Dt)}=abs[(d1-d2)/2]=abs[(0.12-0.08)/2]=0.02<0.05四﹑制作位置度公差表PIN BASE D1 D2 Da=(D1+D2)/2 Dt DE 判定12345(二)﹑IDE 44P垂直位置度的标注与测量如图﹐IDE 44P端子在垂直方向上具有以下特点﹕排数少(只有两排)﹐每排端子数量多(达22PIN)﹐长度值为端子材厚值﹐对于不同的端子﹐其值差异极小﹐因此我们可把上排端子和下排端子分别看成两个整体。
下面以下排端子为例介绍其测量方法。
一、测出角柱垂直方向上Φ1.70的实际尺寸﹐然后置中归零﹔二、往下偏移2.00﹐然后归零﹔三、分别找出位置向上和向下偏离最大的端子﹐测出其端子上下表面的距离﹐并测出端子实际材厚值﹕DE1=d1-T/2=0.15-0.20/2=0.05DE2=d2-T/2=0.17-0.20/2=0.07下排端子的位置度最大偏差为﹕max(DE1﹐DE2)=0.07<0.10为基准﹐用于控制端子锡脚与与PCB板的配合﹐现其位置度公差0.18﹔另一个是端子接触区域的位置度﹐此位置度以KEY为基准﹐用于控制端子接触区域与对插件的配合﹐现其位置度公差0.3。
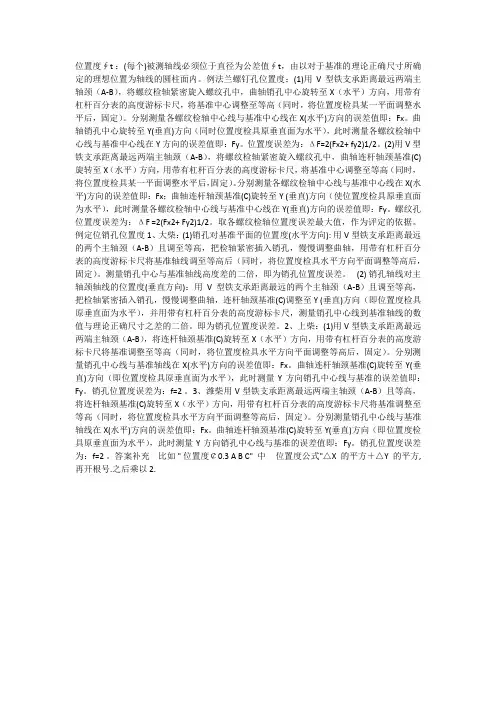
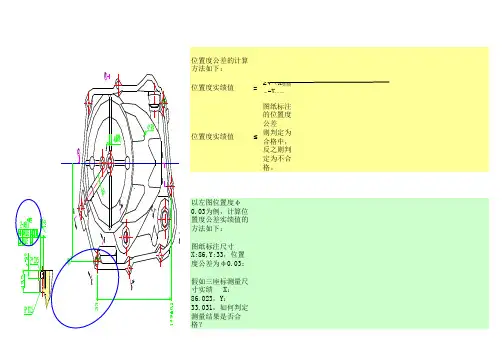
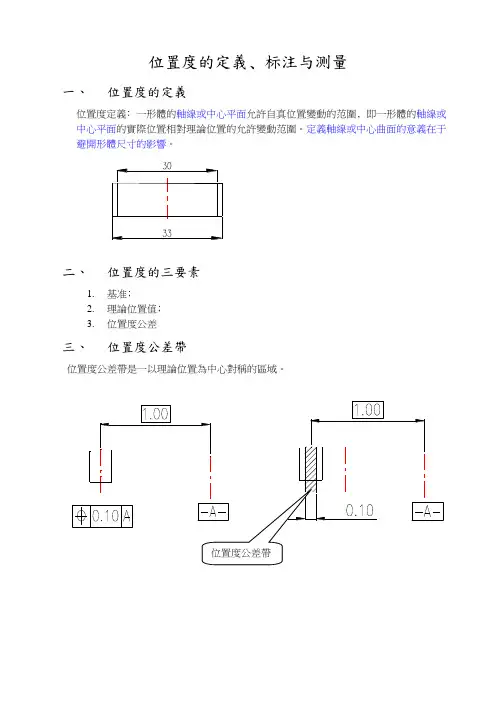
位置度∮t :(每个)被测轴线必须位于直径为公差值∮t,由以对于基准的理论正确尺寸所确定的理想位置为轴线的圆柱面内。
例法兰螺钉孔位置度:(1)用V型铁支承距离最远两端主轴颈(A-B),将螺纹检轴紧密旋入螺纹孔中,曲轴销孔中心旋转至X(水平)方向,用带有杠杆百分表的高度游标卡尺,将基准中心调整至等高(同时,将位置度检具某一平面调整水平后,固定)。
分别测量各螺纹检轴中心线与基准中心线在X(水平)方向的误差值即:Fx。
曲轴销孔中心旋转至Y(垂直)方向(同时位置度检具原垂直面为水平),此时测量各螺纹检轴中心线与基准中心线在Y方向的误差值即:Fy。
位置度误差为:ΔF=2(Fx2+ fy2)1/2。
(2)用V型铁支承距离最远两端主轴颈(A-B),将螺纹检轴紧密旋入螺纹孔中,曲轴连杆轴颈基准(C)旋转至X(水平)方向,用带有杠杆百分表的高度游标卡尺,将基准中心调整至等高(同时,将位置度检具某一平面调整水平后,固定)。
分别测量各螺纹检轴中心线与基准中心线在X(水平)方向的误差值即:Fx;曲轴连杆轴颈基准(C)旋转至Y (垂直)方向(使位置度检具原垂直面为水平),此时测量各螺纹检轴中心线与基准中心线在Y(垂直)方向的误差值即:Fy。
螺纹孔位置度误差为:ΔF =2(Fx2+ Fy2)1/2。
取各螺纹检轴位置度误差最大值,作为评定的依据。
例定位销孔位置度1、大柴:(1)销孔对基准平面的位置度(水平方向): 用V型铁支承距离最远的两个主轴颈(A-B)且调至等高,把检轴紧密插入销孔,慢慢调整曲轴,用带有杠杆百分表的高度游标卡尺将基准轴线调至等高后(同时,将位置度检具水平方向平面调整等高后,固定)。
测量销孔中心与基准轴线高度差的二倍,即为销孔位置度误差。
(2) 销孔轴线对主轴颈轴线的位置度(垂直方向):用V型铁支承距离最远的两个主轴颈(A-B)且调至等高,把检轴紧密插入销孔,慢慢调整曲轴,连杆轴颈基准(C)调整至 Y (垂直)方向(即位置度检具原垂直面为水平),并用带有杠杆百分表的高度游标卡尺,测量销孔中心线到基准轴线的数值与理论正确尺寸之差的二倍。
三坐标测量分度圆孔组位置度的方法及计算分析位置度是多种形状和位置公差中的一种。
国家标准规定,位置度误差是被测实际要素对其想要素的变动量。
即理想要素是对于基准的位置由理论正确尺寸来决定的。
本文通过三坐标测量机对特殊位置度的测量,就分度圆位置度的计算方法进行了详细的分析。
标签:分度圆;位置度;理论正确尺寸1 概述三坐标已被广泛应用于工业产品精密零件的测量,对于手工不易操作的特殊零件的测量,通过三坐标测量机就很容易实现。
比如:平面度、直线度、园柱度等。
空间元素间的位置关系,如:内孔公共轴线间的垂直、平行,公共轴线、公共平面的建立与体现等,都可以通过三坐标测量后获得。
因此,三坐标测量机为对现代工业的高速发展起到了无可替代的作用。
但对于形位误差的确定是个比较复杂的问题,本文对特殊位置度的测量,通过三坐标采集一定的数据,再对数据进行合理计算获得的。
2 位置公差的概念在形位公差标准中,位置度是一种重要的公差标准。
当最大实体原则应用于被测要素时,实际上是将被测要素的公差带予以放宽,有利于产品的加工和装配,因此,位置度公差在产品设计和实际工作中得到了广泛的应用。
在位置度误差检测中,对图样上经常出现的变化多样的不规范位置度,检验人员对测量结果进行技术处理。
并按照位置度的定义,进行公式推导,再通过测量机检测的数据,准确计算出位置度的误差值。
3 孔的位置度公差带点的位置度公差带是直径为公差值t,且以点的理想位置为中心的圆或球内的区域。
孔的位置度必须位于直径为公差值t1、t2的两圆柱的重叠部分。
4 分度圆孔组位置度的测量与计算4.1 被测要素分析图1为分度圆孔组位置度的典型零件,要求6—ΦD1孔均布,对基准A、B 的位置度公差为Φt。
被测孔位置度的公差带为:被测轴线必须位于直径为公差值t且相对于基准A、B所确定的理想位置为轴线的圆柱面内的区域。
孔对于基准A的误差,是指孔在整个有效长度上所有截面的位置都不能超过允许范围,对于基准B的误差包括径向误差和角向误差。
这是本人对于位置度公差的理解过程(或思维过程)的总结,如果大家觉得有价值就参考一下,如果大家觉得没意思,就一笑了之。
还是按习惯分成七步来讲,如果不小心又把大家给讲晕了,那是我的无心之错,敬请谅解。
举个例子也许能弥补一下表达能力的不足:Z-V!R#Xv: z7 O5 Y" _' l; O" v[attachment=25911] Ns'FH(:3 C/ Y) k1 H3 A3 MF?7u~b|@{) ?6 m2 Z% y* Q第一步:确定公差带的大小和形状。
公差带大小及形状是由公差框格中的公差值来确定的,公差值的大小就是公差带的大小,其形状则由公差值有无直径符号来确定,如果公差值前有直径符号,它的公差带就是一个直径等于公差值的圆柱;如果公差值前没有直径符号,它的公差带就应该是相距公差值的两平行平面。
从上面的例子中可以看出,6个φ8的孔的位置度公差带是直径为0.1的圆柱,而4个φ12的孔的位置度公差带是直径为0.2的圆柱。
t-_#Q bzE{ 3 l1 Y6 G! C; F9 w第二步:根据公差带的实体状态修正符号确定补偿公差。
公差带的实体状态由公差值后面的修正符号来确定。
如果没有任何修正符号,则表示位置度公差带在RFS状态,即公差带的大小与被测孔的实际尺寸无关;如果带MMC符号,则表示公差带适用于被测孔在MMC 时,当被测孔的实际尺寸从MMC向LMC偏离时,该偏离量将允许被补偿到位置度公差带上;如果带LMC符号,则表示公差带适用于被测孔在LMC时,当被测孔的实际尺寸从LMC向MMC偏离时,该偏离量将允许被补偿到位置度公差带上。
上图中两个位置度公差均是MMC 状态,因此它们的公差带的大小与被测孔的实际尺寸相关。
比如对φ8的孔来说,当它的实际尺寸在MMC时(φ8),它的位置度要求为φ0.1,当它的实际尺寸在LMC时(φ8.25),它的位置度公差带就变成了φ0.1+(φ8.25-φ8)=φ0.35。

x方向y方向孔径x方向y方向fx fy 1# 6.189
3.221
5.569
6.17
3.24
0.019
-0.019
2#
备注
名词解释:理论正确尺寸。
t:公差带,t 给:给定的公差值,t 补:补偿值,t 允:公差允许值。
MMC:最大实体材料,对于孔或者槽来说,就是最小极限尺寸;对于轴或者凸台来说,就是最大极
公式解释:fx=(x实测数据-x理论正确尺寸)、fy=(y实测数据-y理论正确尺寸)、误差值f=√fx^2+
评定标准:如2f>t 给或2f>t 允,则超差;但MMC最大实体材料前提下,要根据公差的允许值t 允来判定
例:以A212 Boot为例,以实际圆的圆心为坐标原点,实际量测x方向为6.189mm,y方向为
6.17,y方向为3.24,求出2f为0.054;图面给定的位置度t 给为0.1,因2f=0.054小于t 给0.1,所以判OK.
孔位置度计算方式
样品编号理论正确尺寸实测数据
误差值
方向为3.221mm,孔径为5.569mm;产品理论尺寸x方向为54小于t给0.1,所以判OK.
值。
法兰(接盘)螺栓连接孔位置度公差的确定法一:分布圆公差取js7,其公差值可由表查得,记为A;则其位置度公差为:A*孔个数。
(取整)例:如图所示。
分布圆直径为370,在其上分布了16个直径为20的孔。
查表可知,公差取js7,直径为400的分度圆,其公差值为+-28,即0.028mm。
取前两位小数,其公差值为0.03mm。
则孔的位置度为:0.03*16=0.48取整得0.5法二:孔直径2以下(过孔直径加大0.2),位置度为0.1;孔直径2~10(过孔直径加大0.5),位置度为0.25;孔直径10~20(过孔直径加大1),位置度为0.5;(过孔的加大尺寸取位置度的2倍)。
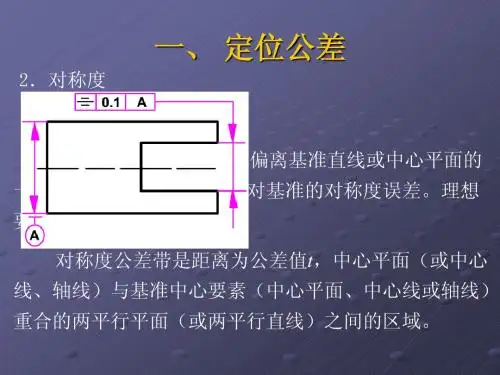
位置度(Displacement)以理想位置为中心,包含被测点、线或面的圆、球的最小直径,或评价方向的两平面之间的最小距离。
位置误差根据其位置,可以分为以下三类:定向误差:平行度、垂直度和倾斜度定位误差:位置度、同轴度和对称度跳动:圆跳动、全跳动1、定向误差定义:是被测实际要素对一具有确定方向的理想要素的变动量,该理想要素的方向由基准确定。
意义:定向误差值用定向最小包容区域(简称定向最小区域)的宽度或直径表示。
定向最小区域是指按理想要素的方向包容被测实际要素时,具有最小宽度或直径的包容区域。
理想要素首先要与基准平面保持所要求的方向,然后再按此方向来包容实际要素,所形成的最小包容区域,即定向最小区域。
定向公差具有如下特点:1) 定向公差带相对基准有确定的方向,而其位置往往是浮动的。
2) 定向公差带具有综合控制被测要素的方向和形状的功能。
因此在保证功能要求的前提下,规定了定向公差的要素,一般不再规定形状公差,只有需要对该要素的形状有进一步要求时,则可同时给出形状公差,但其公差数值应小于定向公差值。
2、定位误差定义:是被测实际要素对一具有确定位置的理想要素的变动量,该理想要素的位置由基准和理论正确尺寸来确定。
意义:定位误差值用定位最小包容区域(简称定位最小区域)的宽度或直径表示。
计测技术经验与体会·59·按最大实体要求补偿位置度的计算方法杨黎梅(中航工业哈尔滨东安发动机(集团)有限公司国际业务部,黑龙江哈尔滨150066)摘要:主要介绍了用三坐标测量机(CMM)测量位置度时进行相应最大实体要求补偿的原理,并针对某型号零件进行了多个要素及基准同时补偿的分析和计算。
关键词:补偿;位置度;基准;CMM中图分类号:文献标识码:文章编号:1674-5795(2010)04-0059-031位置度公差的相关概念位置度公差用以限制被测点、线、面的实际位置对其理想位置的变动[1]。
当位置度公差按最大实体要求标注时,可以满足配合或互换的要求。
最大实体要求的定义为:被测要素的实际轮廓应遵守其最大实体实效边界,当其实际尺寸偏离最大实体尺寸时,允许其形位误差值超出在最大实体状态下给出的公差值的一种要求。
当最大实体要求应用于被测要素时,被测要素的形位公差值是在该要素处于最大实体状态时给出的,当被测要素的实际轮廓偏离其最大实体状态,即其实际尺寸偏离最大实体尺寸时,形位误差值可超出在最大实体状态下给出的形位公差值,即此时的形位公差值可以增大。
当最大实体要求应用于基准要素时,基准要素应遵守相应的边界,若基准要素的实际轮廓偏离其相应的边界,则允许基准要素在一定范围内浮动,其浮动范围等于基准要素的体外作用尺寸与其相应的边界尺寸之差[2]。
以前,在应用最大实体要求时,一般都是采用综合量规进行检测,一般不进行补偿值的计算。
随着CMM的应用日益广泛,我们需要对补偿值的规律性进行分析、对最大补偿值进行计算,本文主要就国家标准中没有详细说明的多个被测要素与基准要素同时进行最大实体补偿的情况进行了示例分析和计算。
2位置度最大实体补偿的分析和计算1)当被测要素为多个要素,仅对被测要素自身补偿就可以满足图纸要求时,其最大实体补偿的计算方法与被测要素为单一要素的补偿方法相同,只需要按照其补偿方法逐个对被测要素进行补偿。