利用高斯伪谱法求解升力航天器最优再入轨迹
- 格式:pdf
- 大小:325.33 KB
- 文档页数:6
RLV应急再入轨迹规划问题的动态伪谱法求解
呼卫军;周军;常晶;卢青
【期刊名称】《宇航学报》
【年(卷),期】2015(036)011
【摘要】针对可重复使用运载器(RLV)的应急轨迹规划问题,提出了动态伪谱法,实现了目标变更与能力下降情况下的轨迹重构.该方法将应急轨道规划问题转换为动态全局规划问题,基于Legendre-Gauss-Lobatto伪谱法进行了连续最优问题的离散化处理,推导了连续Bolza问题与离散化谱方法的一致性,并基于拉格朗日算子进行了性能指标优化.考虑到非连续最优解的收敛困难,给出了高效的初始配点和动态规划算法.最终的仿真结果表明所提出方法可有效实现再入轨迹重构,适应气动力系统20%的拉偏,且终端约束精度小于10 m.
【总页数】7页(P1255-1261)
【作者】呼卫军;周军;常晶;卢青
【作者单位】西北工业大学精确制导与控制研究所,西安710072;西北工业大学精确制导与控制研究所,西安710072;西北工业大学精确制导与控制研究所,西安710072;西北工业大学精确制导与控制研究所,西安710072
【正文语种】中文
【中图分类】TP273
【相关文献】
1.一种新型RLV再入轨迹在线规划方法 [J], 沈振;胡钰;任章;宋剑爽
2.基于正交试验的RLV再入轨迹参数灵敏度分析 [J], 李洋;高祥武;郑宏涛;李永远
3.利用高斯伪谱法求解升力航天器最优再入轨迹 [J], 周文雅;杨涤;李顺利
4.利用高斯伪谱法求解具有最大横程的再入轨迹 [J], 周文雅;杨涤;李顺利
5.变信赖域序列凸规划RLV再入轨迹在线重构 [J], 宗群; 李智禹; 叶林奇; 田栢苓因版权原因,仅展示原文概要,查看原文内容请购买。
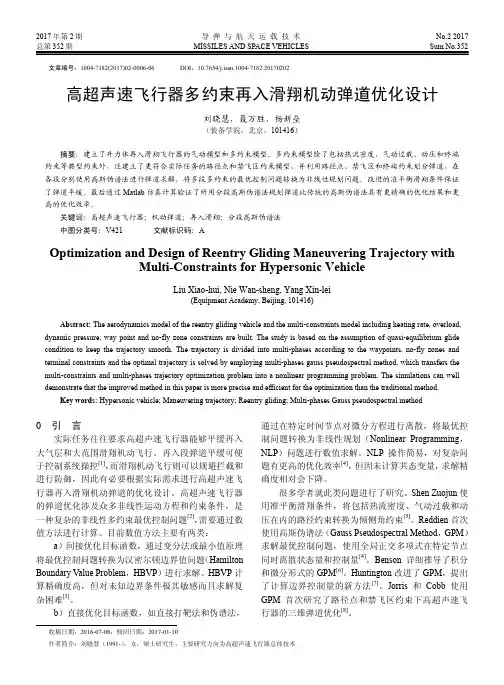
复杂约束条件下再入高超声速滑翔飞行器轨迹快速优化王路;邢清华;毛艺帆【期刊名称】《固体火箭技术》【年(卷),期】2016(039)006【摘要】作为直接法的典型代表,高斯伪谱方法在处理复杂约束条件(含路径点或禁飞区约束)下再入高超声速滑翔飞行器轨迹优化问题时,仅能保证所得轨迹在各高斯节点处严格满足各项约束,而节点之间轨迹的可行性无法保证,为解决这一问题,文章提出改进多阶段高斯伪谱方法.该方法首先使用新定义的两类节点(固定节点和虚拟节点)将轨迹分段,其中固定节点是用来保证路径点与高斯节点重合,虚拟节点则是用来保证禁飞区附近分布更多的高斯节点,此分段方式能保证所得轨迹在任意位置可行;然后,向各分段轨迹插入指定数目的高斯节点;最后,使用序列二次规划方法对此多阶段轨迹优化模型进行求解.仿真结果表明,改进多阶段高斯伪谱方法在处理复杂约束条件下再入高超声速滑翔飞行器轨迹优化问题时快速有效.【总页数】9页(P839-846,862)【作者】王路;邢清华;毛艺帆【作者单位】空军工程大学防空反导学院,西安710051;空军工程大学防空反导学院,西安710051;空军工程大学防空反导学院,西安710051【正文语种】中文【中图分类】V448.2【相关文献】1.高超声速滑翔式飞行器再入轨迹多目标多约束优化 [J], 陈小庆;侯中喜;刘建霞2.再入高超声速滑翔飞行器轨迹快速优化 [J], 王路;邢清华;毛艺帆3.复杂约束条件下高超声速飞行器再入轨迹优化 [J], 张合新;宫梓丰;蔡光斌;宋睿4.复杂约束条件下高超声速飞行器再入轨迹优化 [J], 张合新;宫梓丰;蔡光斌;宋睿;5.高超声速滑翔飞行器再入轨迹快速、高精度优化 [J], 赵吉松; 张建宏; 李爽因版权原因,仅展示原文概要,查看原文内容请购买。
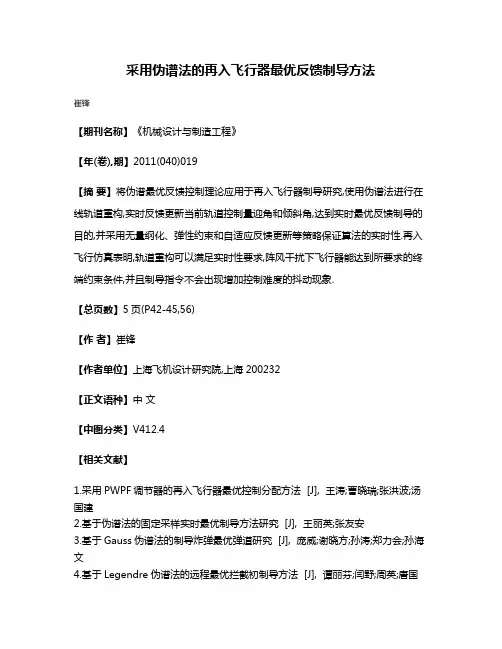
采用伪谱法的再入飞行器最优反馈制导方法
崔锋
【期刊名称】《机械设计与制造工程》
【年(卷),期】2011(040)019
【摘要】将伪谱最优反馈控制理论应用于再入飞行器制导研究,使用伪谱法进行在线轨道重构,实时反馈更新当前轨道控制量迎角和倾斜角,达到实时最优反馈制导的目的,并采用无量纲化、弹性约束和自适应反馈更新等策略保证算法的实时性.再入飞行仿真表明,轨道重构可以满足实时性要求,阵风干扰下飞行器能达到所要求的终端约束条件,并且制导指令不会出现增加控制难度的抖动现象.
【总页数】5页(P42-45,56)
【作者】崔锋
【作者单位】上海飞机设计研究院,上海200232
【正文语种】中文
【中图分类】V412.4
【相关文献】
1.采用PWPF调节器的再入飞行器最优控制分配方法 [J], 王涛;曹晓瑞;张洪波;汤国建
2.基于伪谱法的固定采样实时最优制导方法研究 [J], 王丽英;张友安
3.基于Gauss伪谱法的制导炸弹最优弹道研究 [J], 庞威;谢晓方;孙涛;郑力会;孙海文
4.基于Legendre伪谱法的远程最优拦截初制导方法 [J], 谭丽芬;闫野;周英;唐国
金
5.采用伪谱法的再入飞行器最优反馈制导方法 [J], 崔锋
因版权原因,仅展示原文概要,查看原文内容请购买。
第31卷第4期2010年4月宇航学报JournalofAstronauticsVol.31No.4April2010基于高斯伪光谱的星际小推力转移轨道快速优化尚海滨,崔平远,徐瑞,乔栋(北京理工大学深空探测技术研究所,北京100081)摘要:针对星际小推力转移轨道优化问题,给出了一种基于高斯伪光谱配点的快速优化算法。
首先,基于归一化的改进春分点根数建立了星际小推力转移轨道的优化模型;然后,采用高斯伪光谱配点策略对优化模型进行离散化处理,推力方向限制和天体星历分别作为路径约束和事件约束,将轨道优化问题转化为一个大规模多约束参数优化问题;在此基础上,基于高斯伪光谱的配点特性,推导出性能指标和约束方程的解析雅可比矩阵,保证了雅可比矩阵计算的准确性和效率;最后,以利用太阳能电推进探测火星和水星为例,对所给算法进行了数值验证。
数值结果表明:高斯伪光谱方法可有效用于星际小推力轨道的优化问题,并且与数值差分相比,解析的雅可比矩阵算法可提高计算效率67.78%。
关键词:小推力;星际转移;快速优化;高斯伪光谱;雅可比矩阵中图分类号:V41 文献标识码:A 文章编号:1000 1328(2010)04 1005 07DOI:10.3873 j.issn.1000 1328.2010.04.0110 引言在星际探测任务中,采用小推力发动机能够有效提高探测器的有效载荷质量,增加探测任务的科学回报。
与传统脉冲发动机不同,小推力发动机推力很小,需要长时间加速才能达到改变轨道的目的,导致轨道动力学模型非线性较强,并且传统脉冲轨道问题中的许多假设不再成立,这就给轨道的设计与优化带来了很大的难题。
星际小推力转移轨道优化的本质是解算一个满足复杂约束的连续最优控制问题。
许多学者针对这一问题进行了研究,提出了多种行之有效的优化方法[1-4]高斯伪光谱法是近年来新发展的一种高效的精确配点策略[5-6],与传统方法相比,其具有三个显著优点:(1)KKT条件与极大值原理一阶最优性条件等价,求解精度较高;(2)动力学约束只与当前节点状态有关,寻优参数规模小;(3)具有伪光谱方法的指数收敛特性,收敛性好。
RBCC可重复使用运载器上升段轨迹优化设计
龚春林;韩璐
【期刊名称】《固体火箭技术》
【年(卷),期】2012(035)003
【摘要】针对火箭基组合动力(RBCC)可重复使用运载器(RLV)轨迹多段、多控制变量、推力与飞行轨迹耦合,飞行轨迹设计困难的问题,提出了基于高斯伪光谱方法的数值优化求解模型和求解方法,并获得满足要求的上升段燃料最省轨迹.将该轨迹分为3部分,分别由引射火箭、亚燃冲压和超燃冲压发动机提供动力,以攻角和燃料秒流量为控制变量,根据轨迹任务和各模态发动机启动及工作条件建立优化模型、设定各段末端和路径约束,利用高斯伪谱法求解最优轨迹并利用特殊方法计算边界控制变量.通过与传统方法所得轨迹的对比表明,所建立的优化模型和方法可快速求解出RBCC运载器上升段最优轨迹,优化结果符合RBCC运载器工作特点.
【总页数】6页(P290-295)
【作者】龚春林;韩璐
【作者单位】西北工业大学航天学院,西安710072;西北工业大学航天学院,西安710072
【正文语种】中文
【中图分类】V421.1
【相关文献】
1.可重复使用运载器上升段飞行控制 [J], 贺成龙;陈欣;吴了泥
2.基于反馈线性化的可重复使用运载器上升段闭环制导 [J], 贺成龙;陈欣;黄一敏
3.可重复使用运载器上升段运动分析 [J], 闫晓东;唐硕
4.可重复使用运载器的上升段轨迹线设计 [J], 贺成龙;陈欣;杨一栋
5.RBCC飞行器上升段飞行走廊规划方法 [J], 陈婷婷; 孙春贞
因版权原因,仅展示原文概要,查看原文内容请购买。
伪谱最优控制方法伪谱最优控制方法是一种用于求解非线性最优控制问题的数值优化方法。
通过离散化状态和控制,将原问题转化为一个非线性规划问题,并利用伪谱方法对其进行求解。
本文将介绍伪谱最优控制方法的基本原理、算法步骤和应用示例。
第一步是对状态和控制变量进行离散化。
通过选择一组状态和控制的离散点,将原问题转化为一个有限维的优化问题。
第二步是引入伪谱权重函数。
通过定义伪谱权重函数,可以近似地表示原问题的动态约束和性能指标。
伪谱权重函数的选择是一个关键步骤,需要根据问题的具体情况进行调整。
第三步是将原问题转化为一个非线性规划问题。
利用伪谱方法,将原问题的动态约束和性能指标表示为离散化的状态和控制变量之间的代数方程。
第四步是求解非线性规划问题。
通过使用现有的优化算法,如序列二次规划法等,求解得到最优控制策略。
以航天器姿态控制为例,伪谱最优控制方法可以用来求解航天器姿态控制问题,即在给定的约束条件下,设计一种最优的控制策略,使得航天器能够按照预定的姿态进行运动。
首先,将航天器的姿态离散化,将姿态变量表示为一组离散的状态变量。
然后,通过引入伪谱权重函数,近似地表示姿态约束和性能指标。
将姿态控制问题转化为一个非线性规划问题,并利用伪谱最优控制方法求解该问题。
通过求解非线性规划问题,可以得到最优的航天器姿态控制策略。
这个策略可以用来指导航天器的实际控制操作,以实现预定的姿态运动。
总结起来,伪谱最优控制方法是一种用于求解非线性最优控制问题的数值优化方法。
它通过离散化状态和控制,引入伪谱权重函数,将原问题转化为一个非线性规划问题,并通过求解该问题得到最优的控制策略。
伪谱最优控制方法在航天器姿态控制等领域已经得到了广泛的应用。