焊接机器人运动学分析
- 格式:pdf
- 大小:330.51 KB
- 文档页数:6
工业机器人运动学基础篇:运动学构型本文重点介绍工业机器人常用运动学构形,以下是工业机器人的几种常用结构形式(图),图文描述非常详细,希望能对大家带来帮助!!1、笛卡尔机械臂优点:很容易通过计算机控制实现,容易达到高精度。
缺陷:妨碍工作,且占地面积大,运动速度低,密封性欠缺。
①焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。
②适用于多种类,批量的柔性化作业,提高产品质量,提高劳动生产效率,改进劳动条件和产品的快速更新换代有着显著作用。
2、铰链型机械臂(关节型)关节机器人的关节全都是旋转的,相似于人的手臂,工业机器人中最常见的结构。
它的工作范围较为复杂。
①汽车零配件、模具、钣金件、塑料产品、玻璃制品、陶瓷、航空等的快速检测及产品开发。
②车身装配拆卸、通用机械装配拆卸等制造质量控制等的三坐标测量及误差检测。
③古董、艺术品、雕塑、卡通人物造型、人像成品等的制作。
④汽车整车现场测量和检测等。
3、SCARA机械臂SCARA机器人常用于装配拆卸等作业,最显著的特点是它们在x-y平面上的活动具有较大的柔性,而沿z轴具有很强的刚性,因而,它具有选择性的柔性。
这种机器人在装配作业中取得了较好的使用。
①大量用于装配印刷电路板和电子零部件②搬动和取放物件,如集成电路板等③普通使用于塑料行业、汽车行业、电子产品行业、药品行业和食品工业等领域.④搬取零件和装配工作。
4、球面坐标型机械臂特点:围绕着中心支架附近的工作范围大,两个转动驱动装置容易密封,延伸工作空间较大。
但该坐标复杂,难于控制,且直线驱动装置存在密封的缺陷。
5、圆柱面坐标型机械臂优点:且计算简单;直线部分可使用液压驱动,可输出较大的动力;能够伸入型腔式机器内部。
缺陷:它的手臂能够延伸的空间遭到限制,不能到达近立柱或近地面的空间;直线驱动部分难以密封、防尘;后臂工作时,手臂后端会碰到运动范围内别的物体。
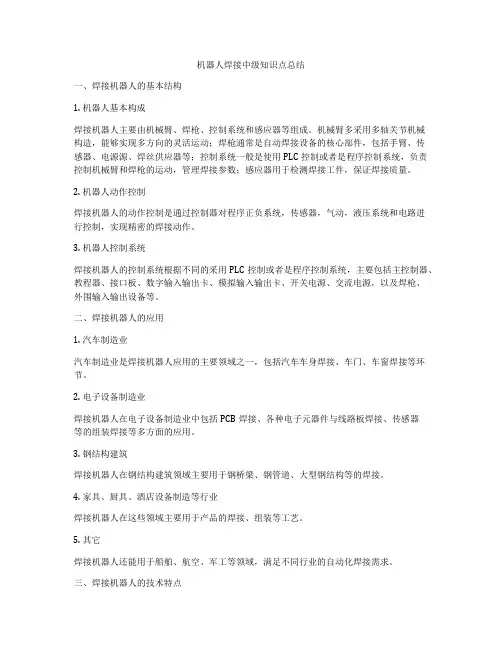
机器人焊接中级知识点总结一、焊接机器人的基本结构1. 机器人基本构成焊接机器人主要由机械臂、焊枪、控制系统和感应器等组成。
机械臂多采用多轴关节机械构造,能够实现多方向的灵活运动;焊枪通常是自动焊接设备的核心部件,包括手臂、传感器、电源源、焊丝供应器等;控制系统一般是使用PLC控制或者是程序控制系统,负责控制机械臂和焊枪的运动,管理焊接参数;感应器用于检测焊接工件,保证焊接质量。
2. 机器人动作控制焊接机器人的动作控制是通过控制器对程序正负系统,传感器,气动,液压系统和电路进行控制,实现精密的焊接动作。
3. 机器人控制系统焊接机器人的控制系统根据不同的采用PLC控制或者是程序控制系统,主要包括主控制器、教程器、接口板、数字输入输出卡、模拟输入输出卡、开关电源、交流电源,以及焊枪、外围输入输出设备等。
二、焊接机器人的应用1. 汽车制造业汽车制造业是焊接机器人应用的主要领域之一,包括汽车车身焊接、车门、车窗焊接等环节。
2. 电子设备制造业焊接机器人在电子设备制造业中包括PCB焊接、各种电子元器件与线路板焊接、传感器等的组装焊接等多方面的应用。
3. 钢结构建筑焊接机器人在钢结构建筑领域主要用于钢桥梁、钢管道、大型钢结构等的焊接。
4. 家具、厨具、酒店设备制造等行业焊接机器人在这些领域主要用于产品的焊接、组装等工艺。
5. 其它焊接机器人还能用于船舶、航空、军工等领域,满足不同行业的自动化焊接需求。
三、焊接机器人的技术特点1. 灵活性焊接机器人能实现多轴自由运动,并能根据工件形状和焊接需要进行调整,灵活适配不同的焊接需求。
2. 精准性焊接机器人通过精确控制系统,能够实现高精度的焊接,保证焊缝的质量。
3. 高效性焊接机器人能够连续工作,往往比人工焊接更为高效,提高了生产效率。
4. 可靠性焊接机器人作业稳定、可靠,能够实现长时间的连续作业,减少了不必要的维护和停机时间。
5. 自动化程度高焊接机器人能够自动化运行,实现自动化生产线的要求。
高速焊接机器人导轨系统的动力学建模与仿真分析导言高速焊接机器人在现代工业中扮演着重要的角色。
为了实现高质量的焊接效果,机器人的导轨系统需要具备良好的动力学性能。
本文旨在对高速焊接机器人导轨系统的动力学特性进行建模与仿真分析,以揭示其运动规律和优化潜力。
1. 动力学建模在进行动力学建模前,我们需要确定所使用的坐标系以及机器人的运动自由度。
一般来说,高速焊接机器人导轨系统使用笛卡尔坐标系,并具有6个自由度,即三个平移自由度和三个旋转自由度。
1.1 运动学模型根据机器人的结构和运动衔接,我们可以推导出机器人的运动学方程。
通过测量机器人末端执行器的姿态和位移,可以得到机器人的位姿和关节角度。
1.2 动力学模型基于运动学模型的基础上,我们可以推导出机器人的动力学方程。
动力学模型描述了机器人在外部力或扭矩作用下的运动特性。
对于高速焊接机器人来说,由于其导轨系统是其动力学特性影响最为明显的部分,我们将重点分析导轨系统的动力学行为。
2. 仿真分析为了验证动力学模型的准确性并深入了解高速焊接机器人导轨系统的运动规律,我们进行了仿真分析。
2.1 建立仿真模型基于前文中推导得到的动力学模型,我们使用仿真软件建立了高速焊接机器人导轨系统的仿真模型。
在仿真模型中,我们考虑了导轨系统的质量、摩擦力、惯性等因素,并模拟了焊接过程中的外部力。
2.2 分析仿真结果通过对仿真模型的运行,我们可以获取导轨系统的关键动力学参数,如加速度、速度和位移等。
同时,我们还可以观察到导轨系统在高速焊接过程中的振动情况以及其他可能的不稳定因素。
3. 结果讨论基于仿真结果,我们可以对高速焊接机器人导轨系统的动力学特性进行深入讨论。
3.1 运动规律分析通过分析导轨系统的位移曲线和速度变化曲线,我们可以了解到机器人在运动过程中的加速度变化情况。
同时,我们还可以通过分析姿态变化曲线来研究机器人的稳定性和运动轨迹。
3.2 振动控制优化通过观察仿真结果中的振动情况,我们可以针对性地对导轨系统进行优化。

法兰克焊接机器人协调参数设置简介法兰克焊接机器人是一种自动化设备,用于在工业生产中进行焊接操作。
为了确保焊接质量和效率,需要对机器人进行协调参数设置。
本文将详细介绍法兰克焊接机器人的协调参数设置的相关内容,包括机器人的运动学模型、关节角度设定、工具坐标系、速度和加速度等。
机器人的运动学模型机器人的运动学模型是描述机器人运动的数学模型。
对于法兰克焊接机器人来说,通常采用七自由度的模型,即包括七个关节。
机器人的末端执行器可以在三维空间中进行平移和旋转,通过设置机器人的关节角度来控制末端执行器的位置和姿态。
关节角度设定关节角度是控制机器人运动的重要参数,通过设定关节角度可以控制机器人的位置和姿态。
在进行焊接操作时,需要根据焊接工件的要求设定关节角度,使机器人能够准确地焊接工件的各个部位。
关节角度设定的方法一般有两种:绝对角度设定和相对角度设定。
绝对角度设定是指直接设定机器人各个关节的角度值,相对角度设定是指设定机器人各个关节的角度变化量。
工具坐标系工具坐标系是描述机器人末端执行器位置和姿态的坐标系。
在焊接操作中,需要设定一个合适的工具坐标系,使机器人能够准确地焊接工件的各个位置。
工具坐标系的设定需要考虑机器人末端执行器的几何形状和焊接工件的几何形状。
通常情况下,可以选择机器人末端执行器的中心点作为工具坐标系的原点,末端执行器的朝向作为工具坐标系的Z轴方向。
速度和加速度速度和加速度是影响机器人运动的重要参数。
在焊接操作中,需要根据工件的要求设定合适的速度和加速度,以确保焊接质量和效率。
速度和加速度的设定需要考虑机器人的动态特性和焊接工件的特性。
一般情况下,可以根据焊接工艺要求设定合适的速度和加速度,使机器人能够平稳地进行焊接操作。
误差补偿误差补偿是在机器人运动过程中对误差进行修正的过程。
在焊接操作中,由于各种因素的影响,机器人的运动可能会产生一定的误差。
为了确保焊接质量,需要对这些误差进行补偿。
误差补偿的方法一般有两种:开环补偿和闭环补偿。
第I 页共I 页目录1 绪论 (1)1.1选题的依据及意义 (1)1.2 研究现状及发展趋势 (1)1.3本课题的研究设计内容及方法 (3)1.4课题的完成情况 (5)2 焊接机器人机构运动学分析 (6)2.1运动学分析数学基础-齐次变换(D-H变换) (6)2.2 变换方程的建立 (7)2.3运动学分析处理方法 (9)2.4逆解过程 (10)2.5本章小结 (28)3结构设计 (30)3.1小车行走结构设计 (30)3.2 摆动关节电机选择 (36)3.3本章小结 (36)结束语 (38)致谢 (39)参考文献 (40)附录 (41)1 绪论1.1 选题的依据及意义这里介绍该课题的选题背景,以及完成该课题的意义。
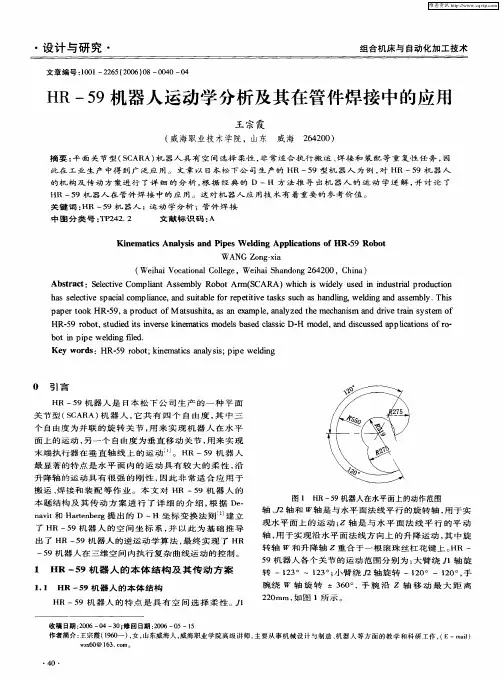
1.1.1 选题的依据针对集装箱波纹板焊接自动化水平低的现状:目前用于焊接集装箱侧板与顶侧梁、底侧梁的自动焊专机,由于在焊接过程中,焊枪不能随波形的变化调整与焊枪速度的夹角(焊接工艺参数也未有变化),如图1.1所示,在直线段与在波内斜边段,焊接速度方向恒为水平向右,而焊枪与焊缝保持垂直,故焊枪与焊接速度的夹角不能保持恒定,直接导致在直线段的焊缝成形与在波内斜边段的焊缝成形不能保持一致,进而导致在直线段焊接与在波内斜边段焊接的焊缝的质量不一样,进而制约集装箱的生产质量[1]。
图1.1 集装箱波纹板示意图1.1.2 选题的意义通过完成该课题,即设计出集装箱波纹板三自由度焊接机器人及对其进行运动学分析,能够解决在焊接过程中焊枪不能随波形的变化调整与焊枪速度的夹角这个问题,使得在直线段与在波内斜边段焊接时,焊枪与焊缝都保持垂直,相对于焊缝的焊接速度都恒为同一速度,进而能够提高在直线段与在波内斜边段的焊缝成形的一致性,提高集装箱的生产质量。
1.2 研究现状及发展趋势这里的研究现状及发展趋势包括三个方面:前面也提到这里的集装箱波纹板三自由度焊接机器人(为移动焊接机器人)是为提高焊接自动化水平的,故这里为移动焊接机器人的研究现状及发展趋势;关于结构设计方面的研究现状及发展趋势;关于运动学分析的常用方法[5]。
目录摘要............................................................................................................错误!未定义书签。
Abstract ........................................................................................................错误!未定义书签。
1绪论 (4)1.1 引言 (4)1.2机器人研究现状及发展趋势 (5)1.3本课题的主要研究内容和工作安排 (10)1.3.1课题研究的背景及意义 (10)1.3.2课题研究的内容及安排 (12)2四自由度串联机器人本体结构设计 (13)2.1机器人的总体方案设计 (13)2.1.1抓取机器人功能需求分析及其特点 (13)2.1.2机器人驱动方案的确定 (14)2.1.3机械传动方案的确定 (15)2.1.3机器人基本技术参数设计 (15)2.1.4机器人本体的总体结构 (17)2.2机器人本体基本结构设计 (18)2.2.1大臂和小臂机械结构设计 (18)2.2.2腕部机械结构设计 (20)2.2.3直线组件的设计选择 (20)2.2.4支架结构设计 (21)2.2.5步进电机与减速器的计算和选择 (22)2.2.6机器人传动轴的校核 (25)2.2.7机器人本体的三维模型 (26)2.3本章小结 (27)3四自由度抓取机器人运动学分析及仿真 (28)3.1机器人运动学分析 (28)3.1.1奇次坐标变换 (29)3.1.2 Denavt-Hartenberg(D-H)表示法 (30)3.1.3抓取机器人运动学模型的建立 (32)3.2机器人运动学方程的建立 (33)3.2.1抓取机器人的正运动学分析 (33)3.2.2工业机器人工作空间分析 (35)3.2.3机器人雅可比(Jacobian)关系求解 (38)3.2.4 抓取机器人的逆运动学分析 (41)3.3四自由度串联机器人运动学仿真 (45)3.3.1虚拟样机技术概述 (45)3.3.2本文用到的ADAMS软件模块 (46)3.3.3建立机器人仿真模型 (47)3.3.4机器人位移仿真分析 (49)3.3.5机器人速度仿真分析 (50)3.4 本章小结 (51)4. 轨迹规划及仿真分析............................................................................. 错误!未定义书签。
焊接机器人毕业设计说明书摘要随着科学技术的全面发展和工业需求的大幅增加,焊接这门科学技术在工业生产中所占分量也越来越大,而且焊接技术的优良好坏程度直接决定着零件或产接生产的总体量需求相差较远。
因此,大力发展研究并推广焊接机器人的这门技术已经成为趋势。
本次设计的要点是运用机械原理和机械制造的设计方法设计焊接机器人。
此次设计,是在充分了解焊接机器人在国内外的研究现状的基础上,进而更好的掌握焊接机器人内部结构和工作原理,并对手臂和腕部进行运动学分析和结构设计。
运用液压系统控制,合理布置了液压缸。
同时了解机器人机械结构运动学及运动控制学。
并且为工业上焊接机器人的设计与研发提供理论、设计和数据上的参考,也为工业设计者们提供设计所需的理论和设计实践的参考依据。
该机器人具有刚性好,位置精度高、运行平稳等的特点。
关键字:焊接机器人液压系统机械机构设计AbstractThe point is to use the design principles and design mechanical design mechanical manufacturing welding robot . The design is fully aware of the welding robot at home and abroad on the basis of research on the status quo , and thus a better grasp of welding robots internal structure and workingprinciple , and the arm and wrist kinematics analysis and structural design. The use of a hydraulic system control,reasonable layout of the hydraulic cylinder. While understanding the mechanical structure of the robot kinematics and motion control school . And provide a reference theory, design , and data on industrial welding robots for the design and development , but also provide theoretical and practical design reference design required forIindustrial designers . The robot has a rigid , high position accuracy , smooth operation and other characteristics.Keyword:Welding robot;hydraulic system;mechanicalstructure design目录摘要............................................................ . (I)随着科学技术的全面发展和工业需求的大幅增加,焊接这门科学技术在工业生产中所占分量也越来越大,而且焊接技术的优良好坏程度直接决定着零件或产接生产的总体量需求相差较远。
焊接机器人的运动控制系统设计与实现随着现代工业的发展,焊接机器人的应用越来越广泛,成为工业自动化生产的重要组成部分。
焊接机器人的运动控制系统设计和实现是焊接机器人技术的核心,影响着焊接机器人的性能和使用效果。
本文将从焊接机器人的运动控制系统设计和实现这一重要方面,进行详细的阐述。
一、焊接机器人的运动控制系统概述焊接机器人通常由机械手臂、控制器和焊接装置等组成。
其运动控制系统主要包括位置控制、速度控制和力控制三大部分。
其中,位置控制是指控制机器人末端执行器的位置;速度控制是指控制机器人末端执行器的速度;力控制是指控制机器人末端执行器施加在工件上的力。
焊接机器人的运动控制系统设计和实现是通过控制器来完成的。
控制器负责解决机器人的运动路径规划、运动轨迹控制以及运动过程中出现的干扰问题等。
在运动控制系统中,还需要根据焊接需求来设计相应的控制策略,以保证焊接质量,提高焊接效率。
二、焊接机器人的运动控制系统设计方案在焊接机器人的运动控制系统设计中,需要考虑以下几个方面:1. 焊接机器人的末端执行器设计末端执行器是指连接焊接机器人末端的操作工具,通常由焊钳或焊枪等组成。
末端执行器的设计需要考虑焊接工件的形状、尺寸及重量等因素,并进行适当的优化以提高焊接效果和质量。
通常,末端执行器的设计需要与焊接机器人的运动系统、力控制系统紧密结合,以确保末端执行器能够稳定、精准地对焊接工件进行焊接。
2. 焊接机器人的运动系统设计焊接机器人的运动系统是指焊接机器人的机械手臂及其各类传动装置。
运动系统的设计需要考虑机械器件的刚度、精度及稳定性等因素,以确保机器人能够准确地运动到预定位置,并能够稳定地进行焊接操作。
3. 焊接机器人的控制器设计控制器是焊接机器人运动控制系统的核心,负责焊接机器人的运动控制和装置状态的监测。
焊接机器人的控制器需要根据焊接工艺的需求来设计相应的控制算法,并采用先进的控制器硬件平台来保证焊接机器人的稳定性和可靠性。
哈尔滨工业大学工程硕士学位论文摘要随着工业机器人的应用场合越来越多,对机器人运动规划的要求也越来越严格。
尤其是姿态规划和轨迹优化在工业机器人的应用中具有很重要的作用,如弧焊,喷涂,装配以及打磨等领域中。
同时为了保证跟踪精度,对姿态的轨迹和关节的运动轨迹有着较高光滑性的要求。
由此,本文针对机器人的光滑姿态插补算法以及时间近似最优光滑轨迹优化算法进行研究。
首先,对6自由度弧焊机器人进行了运动学建模。
建立基于DH坐标系的连杆变换矩阵,推导了正运动学和逆运动学表达式。
针对逆运动学,提出了只需求解3次逆矩阵的解析式推导过程,使逆解推导过程得到极大的简化。
分析余弦矩阵,欧拉角以及单位四元数三种姿态表达方式的优缺点。
在MATLAB/SIMULINK中搭建了6自由度弧焊机器人的运动仿真平台,其中包括正逆运动学模块以及拉格朗日动力学模块。
然后,对基于单位四元数的姿态插补算法进行了深入研究。
根据单位四元数的物理意义以及运算法则,将在S3空间单位四元数姿态曲线构造问题转换为在欧氏空间中单位球面光滑球面曲线的构造问题,建立了姿态插补球面曲线表达形式。
应用该转换关系,构造了在两个单位四元数姿态间的单参数插补算法。
推导了正弦加加速度规划算法并将其应用与两姿态插补运算中。
在6自由度弧焊机器人运动仿真平台中,对比欧拉法以及SLERP插补算法的姿态规划结果,表明采用本文提出的单位四元数插补算法具有较好的速度控制能力和光滑性。
最后针对复杂曲线和曲面的加工场合,研究了基于单位四元数多姿态C2连续的姿态插补算法。
应用单位四元数到欧氏空间的映射关系,推导三个姿态间的姿态插补曲线,对比SQUAD多姿态插补算法,结果表明本文提出的多姿态插补算法在插补点具有较好的光滑性。
最后,对时间近似最优的光滑轨迹优化进行了研究。
首先建立了机器人动力学约束下的时间优化模型。
将模型中目标函数和约束表达式转换到参数空间中,能够使得2n维的优化问题转换为2维优化问题。
焊接机器人的路径规划与轨迹控制技术焊接机器人是一种能够自动完成焊接工作的机器人系统,它以其高效、精准、灵活等特点在现代制造业中得到广泛应用。
而路径规划和轨迹控制技术是焊接机器人实现自动化焊接的关键。
一、路径规划技术路径规划技术主要处理的是给定起点和终点的情况下,如何找到一条最佳路径以完成焊接任务。
焊接机器人的路径规划技术可以分为离线规划和在线规划两种。
离线规划是在计算机上通过建模和优化算法得到路径规划结果,再上传给焊接机器人执行。
它的优点是计算精度高,可以减少机器人在工作中的计算量,提高工作效率。
常见的离线规划算法有A*算法、RRT算法等。
在线规划是在机器人执行过程中实时计算路径规划结果。
在线规划的优点是适应性强,可以根据环境变化动态规划路径,并及时响应。
但由于计算量大,需要实时的决策,对计算速度和响应速度要求较高。
常见的在线规划算法有DWA算法、RRT*算法等。
二、轨迹控制技术轨迹控制技术主要处理的是如何控制焊接机器人的运动轨迹,使其按照规划的路径进行焊接操作。
轨迹控制技术包括控制算法和控制器设计两个方面。
控制算法是根据机器人的运动学特性和轨迹规划结果,设计合适的控制规律来控制机器人的姿态和位置。
控制算法要能够确保机器人的平稳运动和精确定位,以实现高质量的焊接。
常见的控制算法有PID控制算法、自适应控制算法等。
控制器设计是将控制算法实现为硬件或软件的形式,控制机器人的运动执行。
控制器要具备高速响应能力和稳定性,能够满足复杂焊接任务的要求。
常见的控制器有伺服电机控制器、PLC控制器等。
三、焊接机器人应用案例焊接机器人的路径规划和轨迹控制技术在实际应用中有着广泛的用途。
以下是一个应用案例:在汽车制造领域,焊接机器人被广泛使用于车身焊接工艺中。
传统的车身焊接工艺需要在预先规划的焊接点上进行焊接,在一些狭小空间难以到达的位置,需要手工完成。
而采用路径规划和轨迹控制技术的焊接机器人可以根据车身模型和焊接点信息,在计算机上进行路径规划,使机器人能够准确地到达每一个焊接点,实现全自动化的焊接操作。
工业机器人工作原理及其基本构成工业机器人工作原理现在广泛应用的焊接机器人都属于第一代工业机器人,它的基本工作原理是示教再现。
示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数\工艺参数等,并自动生成一个连续执行全部操作的程序。
完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。
这就是示教与再现。
实现上述功能的主要工作原理,简述如下:(1) 机器人的系统结构一台通用的工业机器人,按其功能划分,一般由 3 个相互关连的部分组成:机械手总成、控制器、示教系统,如图 1 所示。
机械手总成是机器人的执行机构,它由驱动器、传动机构、机器人臂、关节、末端操作器、以及内部传感器等组成。
它的任务是精确地保证末端操作器所要求的位置,姿态和实现其运动。
图 1 工业机器人的基本结构控制器是机器人的神经中枢。
它由计算机硬件、软件和一些专用电路构成,其软件包括控制器系统软件、机器人专用语言、机器人运动学、动力学软件、机器人控制软件、机器人自诊断、白保护功能软件等,它处理机器人工作过程中的全部信息和控制其全部动作。
示教系统是机器人与人的交互接口,在示教过程中它将控制机器人的全部动作,并将其全部信息送入控制器的存储器中,它实质上是一个专用的智能终端。
(2) 机器人手臂运动学机器人的机械臂是由数个刚性杆体由旋转或移动的关节串连而成,是一个开环关节链,开链的一端固接在基座上,另一端是自由的,安装着末端操作器 ( 如焊枪 ) ,在机器人操作时,机器人手臂前端的末端操作器必须与被加工工件处于相适应的位置和姿态,而这些位置和姿态是由若干个臂关节的运动所合成的。
因此,机器人运动控制中,必须要知道机械臂各关节变量空间和末端操作器的位置和姿态之间的关系,这就是机器人运动学模型。
一台机器人机械臂几何结构确定后,其运动学模型即可确定,这是机器人运动控制的基础。