回转式伸缩臂叉装车的伸缩臂设计
- 格式:docx
- 大小:823.50 KB
- 文档页数:28
基于伸缩式高空作业车设计探讨(云南远鹏装饰设计工程有限公司)摘要:文章主要阐述了伸缩式高空作业车主要机构的设计原理,并对整机稳定性进行了分析。
通过分析,该设备有普通高空作业设备的全部功能,具有回缩尺寸小,伸缩量、工作幅度大,操作灵活等特点,适用于作业空间狭小、尺寸要求严格的工作环境。
关键词:高空作业车;伸缩臂;摆臂;稳定性前言:近年来,随着建筑业的发展,各类起重机得到了广泛的应用。
在一些特殊工作条件下,为进行设备和物料的输送,特殊起重设备应运而生。
狭小空间内,如多层地下建筑,当需要从底层孔洞向顶层输送维修人员及物料时,要求升降机构全缩尺寸很小且全伸尺寸很大,工作机构的可达位置还要能够覆盖较大的作业空间,升降机构上往往附有回转工作平台,受力情况复杂,对设备的强度和结构刚性提出了更高要求。
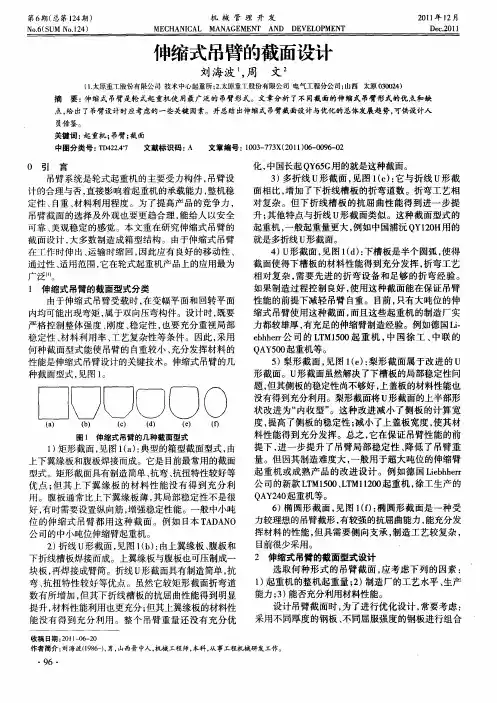
一、伸缩式高空作业车设计方案伸缩式高空作业车主要采用垂直升降形式,展开时工作幅度大,回缩时外形尺寸小,结构紧凑,整机分为升降机构、变幅机构、回转机构和行走机构,其整机模型如图1所示。
图1 整机模型1.1升降机构由于升降距离较大,为提高设备刚度,升降机构采用箱型伸缩臂。
伸缩机构由3节臂组成,伸缩臂采用箱形结构,采用液压油缸和钢丝绳滑轮系统进行伸缩。
图2为采用1个单级液压缸和1套钢丝绳滑轮系统的同步伸缩机构。
油缸伸缩杆与基本臂由销轴铰接,缸体与第二节臂由销轴铰接。
钢丝绳a绕过滑轮a,一端由销轴与第三节臂相连,另一端与基本臂相连。
钢丝绳b绕过滑轮b,一端与基本臂相连,另一端与第三节臂相连。
滑轮b装在第二节臂上。
滑轮a装在液压缸体头部。
当缸体带动第二节臂伸出时,滑轮a随缸体上升,通过钢丝绳a拉动第三节臂上升。
第三节臂的同步缩回,是由钢丝绳b完成的,其动作原理与同步伸出完全一样。
1-基本臂;2-油缸伸缩杆;3-油缸缸体;4-第二节臂;5-第三节臂;6-滑轮a;7-钢丝绳a;8-钢丝绳b;9-滑轮b图2 伸缩臂同步伸缩原理图1.2变幅机构图3为双油缸串联调平机构原理图。
伸缩臂叉车转向系统的设计汪小莹【摘要】介绍了伸缩臂叉车转向系统的组成和设计要求,并通过对负荷传感转向系统原理的研究,设计了伸缩臂叉车负荷传感转向系统.【期刊名称】《起重运输机械》【年(卷),期】2010(000)011【总页数】4页(P24-27)【关键词】伸缩臂叉车;转向系统;负荷传感;设计【作者】汪小莹【作者单位】陕西建工集团总公司,西安,710003【正文语种】中文【中图分类】TH242伸缩臂叉车将汽车起重机的伸缩臂结构与传统叉车的装卸功能有机地结合,可通过改变其伸缩臂的长度,来达到要求的作业高度和距离。
具有有效作业距离大、作业高度高、可越障作业、一机多用的特点,可以配属多种快换装置,实现叉取、装载、举升等作业。
伸缩臂叉车广泛应用于军事、农业、建筑行业,集小型起重机、装载机、叉车、高空作业平台、农用拖拉机的功能于一身,是一种多功能搬运、举升设备,是现代工业、建筑业理想的多功能装卸搬运机械。
建筑型伸缩臂叉车是为了适应建筑领域使用的实际需要,在基本型叉车的基础上,强化了在建筑工地定点输运物料的能力。
为了扩大伸缩臂的作业范围,该型叉车设计成上下2部分,下部分为行走底盘,上部分为驾驶操作与伸缩臂装置,2部分由回转支承连接。
这类叉车既具备了小型建筑用起重机的功能,又具有建筑起重机所不具备的移动灵活、方便的优势[1]。
为了满足建筑用伸缩臂叉车的功能要求,行走底盘需满足多种转向方式的要求。
因此转向系统设计是伸缩臂叉车研发中的重要课题。
1 伸缩臂叉车转向系统设计要求转向系统由转向器和转向驱动机构2部分组成。
转向系统是操纵车辆行驶方向的机构,其主要功用是保持车辆直线行驶的稳定性,并能根据需要使车辆灵活地改变行驶方向。
转向系统的设计要求是[2]:(1)工作可靠。
转向系统与车辆的行驶安全性关系极大,因此其零件应有足够的强度、刚度和寿命,一般通过合理地选择材料和结构来保证。
(2)操纵轻便。
施加在方向盘上的操纵力应尽可能小,以减轻驾驶员劳动强度,利于安全作业。
码垛装车机器人伸缩臂设计
高治理;郭忠峰
【期刊名称】《一重技术》
【年(卷),期】2022()3
【摘要】针对大深度车厢码垛及避免刮碰车间顶棚的要求,以模块设计方法设计一种伸缩臂升降系统,运用有限元理论对升降系统中的关键件斜齿轮进行静力学、动力学等特性分析,通过应力云图、载荷与时间变化曲线评估,证明斜齿轮传动平稳,冲击小,啮合接触应力小于许用应力值,变形量小,满足强度和刚度及可靠性要求。
【总页数】5页(P49-53)
【作者】高治理;郭忠峰
【作者单位】沈阳工业大学机械工程学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于ISIGHT的伸缩臂式叉装车工作装置轻量化设计
2.基于Adams的伸缩臂叉装车属具调平机构设计
3.基于ADAMS的伸缩臂叉装车稳定性设计
4.TH4013SL 型伸缩臂叉装车底盘结构设计与有限元分析
5.基于OtoStudio平台和PLC的机器人码垛装车控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
海量机械毕业设计,请联系Q99872184摘要本设计主要以小型折臂式高空作业车上、下臂结构为研究对象,对上、下臂进行结构和该车上`的设计。
主要分两部分进行阐述,第一部分:根据高空作业车的最大高度10米,在满足作业高度的前提下,进行高空作业臂的结构设计:首先根据作业载荷使用要求选择作业臂材料类型;其次根据最大作业高度确定上、下长度;在经过受力分析利用强度来确定臂的截面尺寸,进而校核强度、刚度、稳定性,查看作业臂的尺寸是否符合要求。
对施加均布载荷和约束,进行结构的强度和刚度的分析,确定危险截面或危险点的应力分布及变形,最后画出作业臂的总装图。
第二部分:液压控制部分主要是指控制上下臂变幅运动的液压缸。
文中详细记录了高空作业机构上下臂液压缸的设计过程,在确定液压系统元件参数的基础上,完成了液压传动系统的设计计算。
关键词:折叠臂式高空作业车,折叠臂式液压系统设计,专用汽车,设计I海量机械毕业设计,请联系Q99872184ABSTRACTIn this paper , to” high-altitude vehicles”,under the arm to study de structure of the upper and the lower arm to the vehicles structure and the design of the hydraulic system,mainly conducted in two parts on,high-aititude vehicles under one of the largest 10 meters high degree of operating,to meet the high degree of operating under the premise of a high-aititude operations arm of the structural design ,first,the use of operating arm asked to choose the type of material and secondly in accordance with the largest Operating highly determined ,under the arm length ;another use of force analysis to determine the strength of the arm section size and location of the fuel tank of the hinged ;further strength ,stiffness,the stability of checking to see whether the size of the operating arm to meet the requirements .to impose uniform loading and constraints ,structural strength and stiffness analysis, risk and danger point cross-section of the stress and deformation ,finally draw operating arm and hand ,arm parts under the plans .and hydraulic control of the mainly refers to control the movement from the top to bottom arm change hydraulic cyclinders .In a detailed record of the agencies operating at high altitude upper arm hydraulic cylinders and hydraulic cylinders under the arm of the design of process .In the determining the parameters of the hydraulic system components ,based on the completion of the hydraulic system desion and calculation.Key words: Folded-arm high-altitude vehicles Folding arm type hydraulic system design Special Vehicle DesignII海量机械毕业设计,请联系Q99872184目录摘要 (I)ABSTRACT (II)第1章绪论 (6)1.1课题的背景 (6)1.2小型折叠臂式高空作业车的发展概况 (7)1.3国内外折叠臂式高空作业车的发展概况 (7)1.4论文研究基本内容 (8)第2章折叠臂式高空作业车作业臂设计 (9)2.1高空作业臂选择 (9)2.1.1高空作业臂分析 (9)2.1.2作业臂作业状态主要技术参数 (9)2.1.3 作业臂材料选择 (10)2.2上下臂的计算与校核 .................................................. 错误!未定义书签。
基于HyperWorks的伸缩臂叉车伸缩臂结构拓扑优化伸缩臂叉车因为具有有效作业距离大,作业高度高,能够越过部分障碍工作,可以更换属具,具有一机多用等特点,自其诞生以来,受到市场欢迎。
然而,由于采用液压缸变幅,使伸缩臂出现悬臂受力状态,承受很大的弯矩。
而且伸缩臂和伸缩机构具有较大的自重,导致在大幅度下的起重量急剧降低,这成为伸缩臂在更大吨位伸缩臂叉车上应用的主要障碍。
减轻伸缩臂重量,增大伸缩臂刚度是改善伸缩臂叉车性能的重要途径。
本文利用美国Altair公司HyperWorks软件中的HyperMesh对伸缩臂叉车的伸缩臂进行拓扑优化设计,得到较合理的结果,为后续设计提供了理论依据。
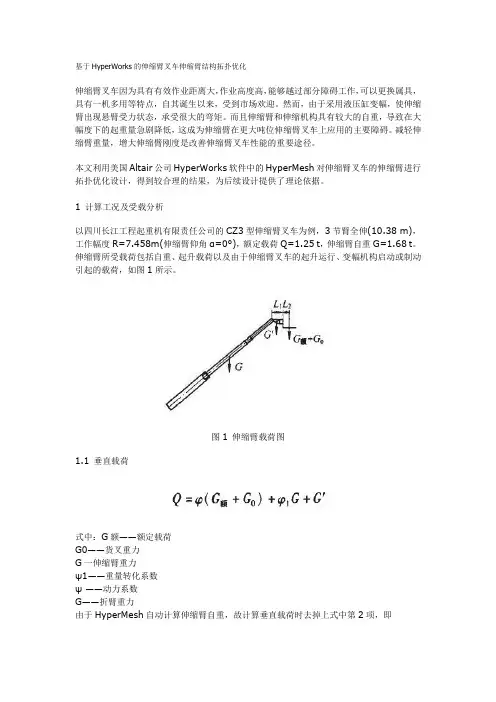
1 计算工况及受载分析以四川长江工程起重机有限责任公司的CZ3型伸缩臂叉车为例,3节臂全伸(10.38 m),工作幅度R=7.458m(伸缩臂仰角α=0°),额定载荷Q=1.25 t,伸缩臂自重G=1.68 t。
伸缩臂所受载荷包括自重、起升载荷以及由于伸缩臂叉车的起升运行、变幅机构启动或制动引起的载荷,如图1所示。
图1 伸缩臂载荷图1.1 垂直载荷式中:G额——额定载荷G0——货叉重力G一伸缩臂重力ψ1——重量转化系数ψ ——动力系数G——折臂重力由于HyperMesh自动计算伸缩臂自重,故计算垂直载荷时去掉上式中第2项,即1.2 臂端力矩由于货物偏心而可能产生的最大臂端扭矩M=G额l/2=1.25×450=562.5(t·mm)式中:l1——载荷中心距l2——折臂长度l’——最大偏心距2 模型建立及有限元分析2.1 模型导入采用SolidWorks软件对该伸缩臂进行三维建模,并通过igs格式转入到HyperMesh软件中。
为了保证计算结果的正确性和经济性,建模过程中在尽量保持和原始结构一致的同时,也需以符合结构主要力学性能为前提进行必要的简化。
伸缩臂结构采用板壳单元进行离散,以四边形单元为主,应避免采用过多的三角形单元引起局部刚性过大;为了使整个伸缩臂有限元模型规模不致过大以保证计算的经济性,单元尺寸控制在20 mm。
伸缩臂叉车1. 简介伸缩臂叉车是一种用于搬运和堆垛物品的特殊叉车。
它与传统的叉车不同之处在于,伸缩臂叉车具有可伸缩的叉臂,使其能够适应不同尺寸的货物。
本文将介绍伸缩臂叉车的工作原理、优势以及应用领域。
2. 工作原理伸缩臂叉车的伸缩叉臂由液压系统控制。
通过增加或减少液压系统中的压力,可以控制叉臂的伸缩程度。
当需要搬运较大尺寸的货物时,叉臂会伸展出来以适应货物的大小。
相反,当搬运小尺寸货物时,叉臂会收缩回去以提高机动性。
3. 优势伸缩臂叉车相比传统的固定尺寸叉车具有一些明显的优势:3.1 可调整叉臂长度伸缩臂叉车的叉臂长度可以根据不同的货物尺寸进行调整。
这种灵活性使得伸缩臂叉车可以适应不同的搬运任务。
相比之下,传统的固定尺寸叉车只能适应特定尺寸的货物,对于尺寸较大或较小的货物可能不适用。
3.2 提高堆垛高度由于伸缩臂叉车具有可伸缩的叉臂,它能够提高堆垛货物的高度。
相比传统叉车的固定叉臂,伸缩臂叉车能够将货物堆垛到更高的高度,从而提高仓储空间的利用率。
3.3 增加机动性伸缩臂叉车的叉臂可以收缩回去,使得整个叉车更加紧凑。
这使得伸缩臂叉车在狭小的空间内操作更加灵活。
相比之下,传统的固定尺寸叉车可能会受到空间限制,难以进入狭小的通道或转弯。
4. 应用领域伸缩臂叉车广泛用于以下领域:4.1 仓储和物流在仓储和物流行业中,伸缩臂叉车能够适应不同尺寸的货物,提高搬运效率和堆垛高度。
它可以用于装卸货物、堆垛和仓库内部的搬运操作。
4.2 制造业在制造业中,伸缩臂叉车可以用于装配线的物料供应和搬运。
由于制造业中的物料尺寸多样,伸缩臂叉车能够满足不同的搬运需求。
4.3 港口和航运在港口和航运领域,伸缩臂叉车常用于装卸货船上的货物。
它能够适应不同尺寸和高度的货物,提高装卸效率。
5. 总结伸缩臂叉车通过可伸缩的叉臂实现对不同尺寸货物的搬运和堆垛。
相比传统的固定尺寸叉车,伸缩臂叉车具有可调整叉臂长度、提高堆垛高度和增加机动性的优势。
高空作业车臂架同步伸缩装置设计【摘要】为增大高空作业车的作业范围,高空作业车的工作臂架常采用伸缩式结构的多节臂。
本文针对现役使用中存在问题,设计一套臂架同步伸缩装置,解决目前已有技术中的不足之处,提供一种结构简单,刚度大,同步伸缩性好,可靠性高的伸缩装置,尤其是一种适用于汽车起重机、高空作业车等工程机械的伸缩臂架同步伸缩装置。
【关键词】同步伸缩装置;伸缩臂架为增大作业范围和作业安全稳定性,工程机械的工作臂架和支腿常采用伸缩式结构的多节臂(支腿)。
现在的伸缩技术和装置主要存在如下不足:(1)每个伸缩臂都由一个油缸驱动,使得结构复杂,难以同步伸缩,效率低;(2)采用油缸加钢丝绳排的结构,会造成伸缩臂间的截面相差大,伸缩结构复杂,臂架重量大、刚度小;(3)采用双套筒伸缩油缸控制的三节支腿伸缩装置,只能顺序伸缩,并且双套筒伸缩油缸的结构复杂,使用可靠性低。
为此作者设计了一套高空作业车臂架同步伸缩装置。
1.装置结构本文的一种同步伸缩装置,包括臂架总成、油缸总成、钢丝绳导向装置和绳排等。
所述的臂架总成包括固定臂(3)、第一伸缩臂(6)和第二伸缩臂(7),各臂的截面均为根据需要而加工成相同的多边形,其中第二伸缩臂(7)滑套在第一伸缩臂(6)之中,第一伸缩臂(6)滑套在固定臂(3)之中,在固定臂(3)的右端内部固定有2个尼龙滑块(10),在第一伸缩臂(6)的左端外部固定有4个尼龙滑块(4),在第一伸缩臂(6)的右端内部固定有2个尼龙滑块(11),在第二伸缩臂(7)的左端外部固定有2个尼龙滑块(5)。
油缸总成包括油缸(9)、固定支座(18)、支座板(2)、支承板(14)和支承轮(13)等,油缸(9)为双作用液压缸,其缸筒的左端通过两根短轴与第一伸缩臂(6)的侧板铰接相连,缸筒的右端中部固定有支承板(14),活塞杆端部固定有固定支座(18),支座板(2)为折弯钢板,其左端固定在固定支座(18)上,支承轮(13)滑装在固定在支承板(14)下部的轮轴上。
伸缩臂叉车防倾翻保护系统设计简析摘要:为解决伸缩臂叉车在行驶和作业过程中,遇到斜坡或当伸缩臂吊物升高伸展时,整车纵向前倾而发生倾翻的危险,设计了防倾翻保护系统。
文中主要介绍伸缩臂叉车防倾翻保护系统的设计原理,并通过场地试验和客户使用,检验了伸缩臂叉车防倾翻保护系统的准确性和可靠性,为完善和推广防倾翻保护系统提供了参考。
关键词:伸缩臂叉车;防倾翻保护系统1引言伸缩臂叉车在行驶和作业中,当遇到斜坡或伸缩臂吊物升高伸展时,整车存在纵向前倾导致发生倾翻的危险。
而目前防止整车发生倾翻主要通过驾驶员合理控制车速、避免斜坡行驶或作业、避免伸缩臂吊装物品过远伸展等方法。
针对整车行驶和作业过程中存在的安全隐患,仅依靠驾驶员合理操作保证安全性远远不够,需要设计一套防倾翻系统以增加伸缩臂叉车的纵向稳定性,进一步提高伸缩臂叉车的使用安全性[1]。
为保证伸缩臂叉车行驶和作业的安全,需要设计一套防侧翻系统,在调研国内外相关技术的基础上,提出如下解决方案:(1)根据整车载荷分布的平衡方程,理论分析作业载荷的安全运动轨迹;(2)根据安全作业的要求,确定载荷控制的阈值;(3)力矩传感器装置选型;(4)安全控制电路设计;(5)试验及客户使用验证。
2应用现状伸缩臂叉车作为一种新型高效的工程机械,广泛应用于矿山、建筑、港口、工厂、部队等,具有全地形越野功能,满足多种环境下的作业要求。
伸缩臂叉车在国外起步较早,欧美很多著名的工程制造商,如美国GENIE、英国JCB、法国MANITOU、德国CLAAS等都生产伸缩臂叉车,关键技术也比较成熟;相比较而言,国内对于伸缩臂叉车的研制和生产起步较晚,相关技术还不够成熟。
在伸缩臂叉车的各项关键技术中,如何保证行驶和作业安全性尤其重要。
由于伸缩臂叉车工作环境的特殊性,当其承载后遇到斜坡或伸缩臂吊物升高伸展时,整车存在纵向前倾导致发生倾翻的危险。
为保证驾驶员能准确了解工作环境,及时调整车的工作状态,确保操作安全,需要为驾驶员提供危险状态预警信息,以及当处于危险状态时的自保护功能。