一般可先初选曲柄 长度和曲柄固定铰链与 已知轨迹的相对位置, 然后在连杆平面上选取 若干点(如图中M、C、 C’、C”等)。当令M点
沿已知轨迹运动时,连杆平面上的其余各点便 画出不同轨迹。找出轨迹最接近圆弧的点(如 图中C点)作为连杆上的另一个活动铰链,则可 得到能满足要求的铰链四杆机构。
若在连杆平面上找不出轨迹最接近圆弧的 点,应改变初选参数重新演试,直到得出满意 的解为止。
飞机起落架、钻夹具等 “死点”位置的过渡:
依靠飞轮的惯性(如内燃机、 缝纫机等)、两组机构错开
“死点”位置的过渡 “死点”位置的应用
2-1-2.实用示例 颚式碎石机
曲柄AB带动连杆BC和摇杆CD运动,固连在摇 杆上的动颚将矿石压碎。
锁紧夹具
利用连杆2和连架杆3成一线,形成机构死点, 来锁紧工件5。
件工作行程的平均速度小于回程的平均速度,则称 该机构具有急回特性。 Ө(极位夹角):是摇杆处于两 极限位置线所夹的锐角 K为行程速度变化系数,即空 回行程和工作行程平均速度 的比值:
K V 2 C1C 2 t2
V1
C1C 2 t1
t1 t2
180 180
或
180 K 1
K 1
只要极位夹角θ ≠ 0 , 就有 K>1 ;
ABCD组成的双摇杆机构的运动可以使悬吊 在E出的物体做平移运动。
上料机械手 通过连杆的上下运动,实现加紧与松开的动作。
手动抽水机中的定块机构
3为固定的机架(定块),通过手柄(1)的转 动使移动导杆(4)往复运动,实现抽水功能。
牛头刨床摆动机构
曲柄BC转动,带动AD摆动,EF在AD的作用 下做往复运动。
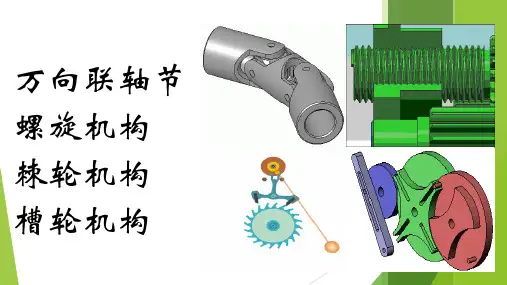
二.机械设计常用机构
2-1.连杆机构 2-2.齿轮机构 2-3.齿轮系机构 2-4.凸轮机构 2-5述