干摩擦下含双侧间隙碰撞振动系统的动力学分析
- 格式:pdf
- 大小:182.58 KB
- 文档页数:3
伴随变阻尼作用的干摩擦下的车辆系统非线性动力学分析的报
告,600字
本报告旨在分析伴随变阻尼作用的干摩擦下的车辆系统非线性动力学。
本报告将首先就变阻尼作用的本质介绍一下,之后深入研究车辆系统的动力学模型以及各项变量之间的关系,然后研究系统的极限状态,最后探讨如何计算出这些变量和应用它们模拟车辆系统的行为。
变阻尼作用可以理解为施加动压或者拉力变化时,相对于基准情况下摩擦力的变化。
当施加的力越来越大时,摩擦力也会随之增大。
这种增大的摩擦力会使得车辆系统变得非线性。
分析车辆系统非线性动力学,需要考虑到以下几个变量:质量、惯性力、摩擦力、相对位移,以及变阻尼作用导致的摩擦力的变化等。
首先,质量的变化会通过惯性力影响车辆系统的运动。
然后,摩擦力的变化又会对车辆系统做出反应,这是因为摩擦力会限制车辆系统的运动。
最后,通过变阻尼作用产生的摩擦力变化,会使车辆系统表现出非线性的特性。
接下来,我们需要深入研究车辆系统的极限状态,如摩擦力的最大值,车辆系统的极限速度与加速度等,以此来准确模拟整个车辆的运动状态。
最后,可以根据模型计算出各变量的值,然后搭配实际实验观测,结合数学原理,用以检验模型的准确性。
通过上述介绍,本报告主要分析了伴随变阻尼作用的干摩擦下的车辆系统非线性动力学。
它涉及到摩擦力变化及影响的各种
变量,以及如何计算出各个变量的值,模拟出车辆系统的行为及运动状态,从而检验模型的准确性。
若干振动机械系统的振动摩擦动力学特性及实验研究振动利用工程是一门新兴的学科,它与人类的生活和生产活动有着不可分割的联系,闻邦椿教授领导的科研团队为这一新学科的发展进行了大量工作,目前振动利用工程已成为人类生活和生产活动不可缺少的手段和必要机制。
振动摩擦作为振动利用工程的一个重要分支,正处在研究与发展的过程中,或者说还正处在起步阶段。
随着工程技术领域的需求不断增加,人们逐渐认识到振动摩擦所带来的好处及其应用的广泛性和普遍性。
许多工程实践已经证明,在振动工况下,物体间的摩擦系数和摩擦力可以显著减小,零部件的磨损可明显减轻,同时其耗能也会随着降低,工效可以得到大大提高,进而可为企业和国家创造显著的经济效益和社会效益。
基于振动与摩擦的内在联系,闻邦椿教授提出了亟待进行深入研究和发展的新学科“振动摩擦学”,这在学术上具有重要价值。
目前国内外已研制出许多采用振动原理的机械设备,工作过程常常包括诸多的工件与物体之间的摩擦,也包括物料或物件之间的相互摩擦,如振动压路机、振动沉拔桩机、振动输送机等。
但有关振动摩擦机理方面的研究还很不深入,或者说还没获得充分的研究,很多问题亟待解决。
如果能够对振动摩擦问题进行深入而系统的研究,在揭示其科学涵义的同时,能够在工程中更好地加以利用,将具有深远的理论价值和现实意义。
本课题以闻邦椿教授提出的振动摩擦概念为先导,将工程技术领域中的典型振动机械作为研究对象,创新性地以非线性动力学、散体动力学、摩擦学以及颗粒物质力学的最新成果为基础,采用国际领先软件和实验设备,将理论、仿真和实验紧密结合,研究振动机械系统的振动摩擦动力学特性。
课题研究内容包括:研究考虑振动和物料相互之间摩擦的散体动力学特性,即振动工况下固体松散物料颗粒之间相互作用的力学特性及其运动规律;振动压实过程中的振动摩擦及其非线性动力学特性分析;振动桩-土系统中的振动摩擦及其非线性动力学特性研究。
相应的研究工作得到了国家自然科学基金重点项目和中央高校博士研究生优秀论文培育基金的大力支持,具体研究内容如下:(1)散体振动作为一种特殊的振动现象,有着极为重要的工程应用价值,但迄今为止,国内外对它的研究甚微,因为常规研究刚体和流体的方法和手段均不适用于对散体的研究。
《空间机械臂间隙与摩擦动力学仿真分析》篇一一、引言空间机械臂作为现代航天技术的重要组成部分,其性能直接关系到空间作业的效率和安全性。
在空间机械臂的设计与制造过程中,间隙与摩擦动力学是两个关键因素。
间隙的存在可能导致机械臂运动过程中的不稳定性,而摩擦动力学则影响着机械臂的精确度和寿命。
因此,对空间机械臂的间隙与摩擦动力学进行仿真分析具有重要的理论和实践意义。
本文将重点对空间机械臂的间隙与摩擦动力学进行仿真分析,以期为相关研究和应用提供参考。
二、空间机械臂结构与工作原理空间机械臂主要由驱动系统、控制系统、机械结构等部分组成。
其中,驱动系统负责提供动力,控制系统负责实现机械臂的精确控制,而机械结构则是实现空间作业的主体。
空间机械臂的工作原理是通过控制系统对驱动系统进行控制,使机械臂完成预定动作,实现空间作业。
三、间隙对空间机械臂动力学的影响间隙是机械系统中普遍存在的现象,它主要由于制造误差、装配误差等因素引起。
在空间机械臂中,间隙的存在可能导致机械臂运动过程中的不稳定性。
为了分析间隙对空间机械臂动力学的影响,我们建立了考虑间隙的动力学模型。
通过仿真分析,我们发现间隙会使机械臂的运动轨迹发生偏离,降低运动的稳定性和精度。
此外,间隙还会导致机械臂在运动过程中产生振动,影响其正常工作。
四、摩擦对空间机械臂动力学的影响摩擦是机械系统中的另一个重要因素,它主要由于接触面之间的相互作用引起。
在空间机械臂中,摩擦不仅影响机械臂的运动精度和寿命,还可能引起热效应等问题。
为了分析摩擦对空间机械臂动力学的影响,我们建立了考虑摩擦的动力学模型。
通过仿真分析,我们发现摩擦会使机械臂的运动产生阻力,降低其运动速度和精度。
此外,摩擦还会导致机械臂在运动过程中产生热量,可能影响其正常工作。
五、空间机械臂间隙与摩擦动力学的仿真分析为了全面分析空间机械臂的间隙与摩擦动力学特性,我们建立了综合考虑间隙与摩擦的动力学模型。
通过仿真分析,我们得到了空间机械臂在不同工况下的运动轨迹、速度、受力等情况。
《空间机械臂间隙与摩擦动力学仿真分析》篇一一、引言空间机械臂作为空间探测、维护和操作的重要工具,其性能的稳定性和可靠性直接关系到空间任务的成败。
间隙和摩擦作为机械臂系统中的两个关键因素,对机械臂的运动学和动力学特性产生重要影响。
因此,对空间机械臂的间隙与摩擦动力学进行仿真分析,对于提高机械臂的性能和稳定性具有重要意义。
二、空间机械臂结构及工作原理空间机械臂是一种能够模拟人手的运动和操作能力的空间机器人,具有高度的灵活性和可操作性。
其主要由臂体、关节、驱动装置等组成,通过各关节的协同运动,实现各种复杂的操作任务。
三、间隙对空间机械臂动力学的影响间隙是机械系统中普遍存在的现象,主要由于零件制造误差、装配误差以及长期使用过程中的磨损等因素导致。
在空间机械臂中,关节间隙的存在会导致机械臂在运动过程中出现抖动、定位不准确等问题,从而影响机械臂的运动性能和稳定性。
因此,分析间隙对空间机械臂动力学的影响具有重要意义。
四、摩擦对空间机械臂动力学的影响摩擦是机械系统中的另一个重要因素,对机械臂的运动性能和稳定性产生重要影响。
在空间机械臂中,由于各关节的相对运动,会产生各种形式的摩擦力,如静摩擦力、动摩擦力等。
这些摩擦力不仅会影响机械臂的运动轨迹和速度,还会导致能量损失和系统发热等问题。
因此,分析摩擦对空间机械臂动力学的影响同样具有重要意义。
五、仿真分析方法为了分析空间机械臂的间隙与摩擦动力学特性,本文采用仿真分析方法。
首先,建立空间机械臂的动力学模型,包括各关节的间隙模型和摩擦模型。
然后,通过仿真软件对模型进行仿真分析,观察机械臂在不同间隙和摩擦条件下的运动性能和稳定性。
最后,根据仿真结果,对机械臂的间隙和摩擦进行优化设计,以提高其运动性能和稳定性。
六、仿真结果与分析通过仿真分析,我们得到了空间机械臂在不同间隙和摩擦条件下的运动性能和稳定性数据。
结果表明,间隙的存在会导致机械臂在运动过程中出现明显的抖动和定位不准确现象,而摩擦则会影响机械臂的运动轨迹和速度。
《空间机械臂间隙与摩擦动力学仿真分析》篇一一、引言空间机械臂作为现代航天技术的重要组成部分,其性能直接关系到空间作业的效率和安全性。
在空间机械臂的设计与制造过程中,间隙与摩擦动力学是两个关键因素。
间隙的存在可能导致机械臂的精度和稳定性下降,而摩擦动力学则影响着机械臂的运动性能和寿命。
因此,对空间机械臂的间隙与摩擦动力学进行仿真分析具有重要的理论意义和实际应用价值。
二、空间机械臂间隙分析1. 间隙的来源及影响空间机械臂的间隙主要来源于制造过程中的装配误差、材料变形等因素。
这些间隙会对机械臂的运动精度和稳定性产生不良影响,如导致运动轨迹的偏差、振动等。
2. 仿真方法及模型建立针对空间机械臂的间隙问题,可采用有限元分析、多体动力学等方法进行仿真分析。
在仿真过程中,需要建立精确的机械臂模型,包括各部件的几何尺寸、材料属性等。
同时,还需考虑装配过程中的误差因素,如装配角度、装配顺序等。
三、空间机械臂摩擦动力学分析1. 摩擦的产生及影响空间机械臂在运动过程中,各部件之间会产生摩擦力,这会影响机械臂的运动性能和寿命。
摩擦力的存在可能导致机械臂的运动不平稳、能量损失等问题。
2. 仿真方法及模型建立针对空间机械臂的摩擦动力学问题,可采用动态仿真方法进行模拟。
在仿真过程中,需要建立考虑摩擦力的机械臂模型,包括各部件之间的摩擦系数、接触面积等参数。
同时,还需考虑机械臂在不同速度、不同载荷下的摩擦特性。
四、仿真结果与分析通过对空间机械臂的间隙与摩擦动力学进行仿真分析,可以得到以下结论:1. 间隙对空间机械臂的运动精度和稳定性有显著影响。
在设计和制造过程中,应尽量减小装配误差和材料变形等因素,以降低间隙的产生。
同时,在实际应用中,需对机械臂进行定期维护和校准,以保持其运动精度和稳定性。
2. 摩擦力对空间机械臂的运动性能和寿命具有重要影响。
在设计和制造过程中,应选择合适的材料和润滑方案,以减小摩擦力的产生。
同时,在实际应用中,需对机械臂进行润滑和维护,以保持其运动性能和延长使用寿命。
《空间机械臂间隙与摩擦动力学仿真分析》篇一一、引言空间机械臂作为空间技术的重要组成部分,其性能的优劣直接关系到空间作业的效率和安全性。
而机械臂的间隙与摩擦问题,作为影响其性能的关键因素之一,一直是研究的热点。
本文旨在通过动力学仿真分析,深入研究空间机械臂的间隙与摩擦问题,以期为提高其性能提供理论依据。
二、空间机械臂概述空间机械臂是一种能够在空间环境中进行复杂操作的机器人系统,其结构复杂、精度要求高。
空间机械臂通常由驱动系统、控制系统、执行机构等部分组成,具有高精度、高速度、高负载等特点。
在空间作业中,机械臂需要完成各种精细操作,如抓取、搬运、装配等任务,因此对其性能要求极高。
三、间隙与摩擦对空间机械臂的影响间隙和摩擦是影响空间机械臂性能的两个重要因素。
间隙的存在会导致机械臂的运动精度降低,影响其操作精度和稳定性。
而摩擦则会使机械臂在运动过程中产生额外的能量损耗,降低其工作效率。
因此,对间隙与摩擦问题的研究对于提高空间机械臂的性能具有重要意义。
四、动力学仿真分析方法为了深入研究空间机械臂的间隙与摩擦问题,本文采用动力学仿真分析方法。
通过建立机械臂的数学模型,利用仿真软件进行动力学分析,探究间隙与摩擦对机械臂运动的影响。
具体步骤包括:建立机械臂的几何模型、定义材料属性、设置约束和载荷、模拟运动过程等。
通过分析仿真结果,可以得到机械臂在运动过程中的动态特性,以及间隙与摩擦对其性能的影响。
五、仿真结果与分析通过动力学仿真分析,我们得到了空间机械臂在不同间隙与摩擦条件下的运动特性。
结果表明,间隙的存在会使机械臂的运动精度降低,尤其是在高速运动时,这种影响更为明显。
而摩擦则会使机械臂在运动过程中产生额外的能量损耗,降低其工作效率。
此外,我们还发现在一定范围内调整机械臂的结构参数和材料属性,可以有效地减小间隙与摩擦对性能的影响。
这些结果为优化空间机械臂的设计提供了重要的理论依据。
六、结论通过对空间机械臂的间隙与摩擦动力学仿真分析,我们深入了解了这两个因素对机械臂性能的影响。
《空间机械臂间隙与摩擦动力学仿真分析》篇一一、引言空间机械臂作为现代航天技术的重要组成部分,其性能直接关系到空间作业的效率和安全性。
在空间机械臂的设计与制造过程中,间隙与摩擦动力学是两个关键因素。
间隙的存在可能导致机械臂运动过程中的不稳定性,而摩擦动力学则影响着机械臂的精确度和寿命。
因此,对空间机械臂的间隙与摩擦动力学进行仿真分析,对于提高其性能和可靠性具有重要意义。
本文将针对空间机械臂的间隙与摩擦动力学进行仿真分析,以期为相关研究和应用提供参考。
二、空间机械臂间隙动力学仿真分析1. 间隙模型建立空间机械臂的间隙主要来源于制造误差、装配误差以及材料变形等因素。
为了准确分析间隙对机械臂运动的影响,需要建立合理的间隙模型。
本文采用基于弹簧-阻尼器模型的间隙模型,将间隙处的相对运动简化为弹簧和阻尼器的力学行为。
2. 仿真实验设计在仿真软件中,将建立的空间机械臂模型与间隙模型进行整合,设定不同大小的间隙值,并设计相应的运动轨迹进行仿真实验。
通过对比不同间隙值下的机械臂运动状态,分析间隙对机械臂运动稳定性的影响。
3. 结果分析仿真结果表明,随着间隙值的增大,空间机械臂的运动稳定性逐渐降低。
当间隙值达到一定程度时,机械臂在运动过程中会出现明显的抖动和失稳现象。
因此,在设计和制造过程中,应尽量减小机械臂的间隙值,以提高其运动稳定性。
三、空间机械臂摩擦动力学仿真分析1. 摩擦模型建立空间机械臂的摩擦主要来源于材料表面间的相互作用。
为了准确分析摩擦对机械臂运动的影响,需要建立合理的摩擦模型。
本文采用库仑摩擦模型,该模型能够较好地描述材料表面间的静摩擦和动摩擦特性。
2. 仿真实验设计在仿真软件中,将建立的空间机械臂模型与库仑摩擦模型进行整合,设定不同的摩擦系数和滑动速度,并设计相应的运动轨迹进行仿真实验。
通过分析不同条件下的摩擦力变化情况,探究其对机械臂运动精度和寿命的影响。
3. 结果分析仿真结果表明,随着摩擦系数的增大和滑动速度的降低,空间机械臂的摩擦力逐渐增大。
收稿日期:20000717基金项目:国家自然科学基金(59905016),国家航天863高技术项目(863-2-2-4-2)资助项目作者简介:俞武勇(1971-),男(汉),安徽,博士生俞武勇文章编号:1003-8728(2001)05-0665-05含间隙机构运动副的动力学模型俞武勇,季林红,阎绍泽,金德闻,贾晓红(清华大学精密仪器与机械学系,北京 100084)摘 要:运动副间隙对某些机械系统的影响已经不容忽视,运动副间隙模型是研究含间隙机械系统的关键问题之一。
本文综述了机构动力学中的运动副间隙模型的近期研究成果,详细地阐述了运动副间隙模型的建模方法及有关数值解法。
着重分析比较了常用的几种运动副间隙模型的特点,评述了目前用于分析含间隙机构的数值解法,并且指出了今后研究所面临的问题。
关 键 词:间隙;碰撞;运动副;机构动力学中图分类号:T H113 文献标识码:A在机械系统中,运动副是连接两构件并允许二者有相对运动的环节,因此运动副需要一定的间隙,制造误差产生间隙,磨损和热变形使间隙增大。
所以,机械系统中运动副间隙是不可避免的。
运动副间隙大大影响机构的动特性,机构的实际运动和理想运动之间产生了偏差,并且增加了构件的动应力,从而引起构件的振动,产生噪音,加速磨损,降低效率和工作精度,特别在高速和微机械系统中,这些影响将更加显著。
在航天领域,由于间隙对机构的非线性影响,常会出现伸展机构失稳、定位精度不够、天线打开失灵等情况,导致航天器失效[1~4]。
机器人研究中,运动副间隙的影响已成为提高智能机器人和机床等定位精度的瓶颈之一[5]。
运动副间隙对某些机械系统的影响已不容忽视,含间隙机构动力学成为了机构动力学的前沿课题[6]。
含运动副间隙的机械系统是复杂的非线性动力学系统,有着丰富的动力学特性,既有理论难度又有重要的工程实际意义。
含间隙机构动力学中,运动副间隙模型及其碰撞特性是最基本的问题之一,本文将对这个问题进行系统的评述,以期较为全面地反映对此问题的研究现状。
一类悬臂梁双侧碰撞系统的全局动力学研究一类悬臂梁双侧碰撞系统的全局动力学研究是将悬臂梁上单体碰撞简化为双侧碰撞,然后分析系统的全局动力学。
在实践中,这类悬臂梁双侧碰撞系统多用于电子行业、机械工程领域,如显示器、打印机、传动系统等,都包含有此类系统。
这类悬臂梁双侧碰撞系统的特点是,悬臂梁上有两个或多个非弹性体和一个弹簧,上面覆盖有固定的固定体,当悬臂梁运行时,体们之间会发生碰撞,而弹簧会缓冲碰撞,使悬臂梁得以继续运行。
在分析这类悬臂梁双侧碰撞系统的全局动力学时,通常采用牛顿-拉格朗日方程的多体动力学模型,通过对悬臂梁的质量、惯性矩、弹性系数及碰撞运动方程进行建模,建立悬臂梁双侧碰撞系统的动力学方程,并通过数值解法对此类悬臂梁双侧碰撞系统的全局动力学进行研究。
为了研究这类悬臂梁双侧碰撞系统的全局动力学,首先需要对系统参数进行合理的取值,如:悬臂梁的质量、惯性矩、弹性系数及碰撞运动方程。
这些参数将决定悬臂梁双侧碰撞系统的动力学行为,因此对这些参数的取值具有重要意义。
在研究这类悬臂梁双侧碰撞系统的全局动力学时,还需要考虑系统的不确定性,如:碰撞运动方程的不确定性,因为碰撞运动方程可能会随系统参数的变化而变化,因此,在研究这类悬臂梁双侧碰撞系统的全局动力学时,需要考虑碰撞运动方程的不确定性。
此外,在分析这类悬臂梁双侧碰撞系统的全局动力学时,还需要考虑系统的动力学不稳定性,因为悬臂梁双侧碰撞系统在运行过程中,可能出现动力学不稳定的现象,如:振荡,而振荡的现象可能会影响系统的运行性能。
因此,在研究这类悬臂梁双侧碰撞系统的全局动力学时,还需要考虑系统的动力学不稳定性,并采取相应措施来防止振荡现象的出现,以保证悬臂梁双侧碰撞系统的正常运行。
总之,研究这类悬臂梁双侧碰撞系统的全局动力学主要包括以下几个方面:(1) 合理取值系统参数;(2) 考虑系统的不确定性;(3) 考虑系统的动力学不稳定性;(4) 采取措施防止振荡现象的出现。
含摩擦与碰撞平面多刚体系统动力学线性互补算法王晓军;王琪【摘要】基于接触力学理论和线性互补问题的算法,给出了一种含接触、碰撞以及库伦干摩擦,同时具有理想定常约束(铰链约束)和非定常约束(驱动约束)的平面多刚体系统动力学的建模与数值计算方法.将系统中的每个物体视为刚体,但考虑物体接触点的局部变形,将物体间的法向接触力表示成嵌入量与嵌入速度的非线性函数,其切向摩擦力采用库伦干摩擦模型.利用摩擦余量和接触点的切向加速度等概念,给出了摩擦定律的互补关系式;并利用事件驱动法,将接触点的黏滞-滑移状态切换的判断及黏滞状态下摩擦力的计算问题转化成线性互补问题的求解.利用第一类拉格朗日方程和鲍姆加藤约束稳定化方法建立了系统的动力学方程,由此可降低约束的漂移,并可求解该系统的运动、法向接触力和切向摩擦力,还可以求解理想铰链约束力和驱动约束力.最后以一个类似夯机的平面多刚体系统为例,分析了其动力学特性,并说明了相关算法的有效性.【期刊名称】《力学学报》【年(卷),期】2015(047)005【总页数】8页(P814-821)【关键词】多体系统;库伦干摩擦;接触力;线性互补问题;非光滑【作者】王晓军;王琪【作者单位】常州工学院机电学院,常州213002;北京航空航天大学航空科学与工程学院,北京100191;北京航空航天大学航空科学与工程学院,北京100191【正文语种】中文【中图分类】O313.7在机械系统中,物体间普遍存在着接触、碰撞和摩擦等问题,如航天器的对接、空间机构的展开、飞机的着陆、车辆的行驶、步行机器人的行走和夯机压实路面等都存在物体间的碰撞和摩擦问题.关于碰撞和摩擦问题的研究已取得了很多阶段性成果[1-7].20世纪末和21世纪初,人们研究了多种形式的接触力模型,其中赫兹接触理论考虑了接触点的局部变形,是研究历史最悠久的接触模型[4,6],但该模型不能反映接触碰撞过程中的能量耗散.近数十年来基于赫兹模型,学者们提出了若干种考虑能量损耗的接触力模型[6,8].常用的接触力模型是将接触面的法向力表示成嵌入量与嵌入速度的非线性函数[8-9].在实际工程中,常用的摩擦模型有库伦干摩擦模型、修正的库伦摩擦模型、黏性摩擦模型、斯特里贝克(Stribeck)摩擦模型和达尔(Dahl)摩擦模型等[7,10-12],其中库伦干摩擦模型能够反映摩擦的动态和静态特性,被认为是最简单使用较广泛的摩擦模型[5-6].但该模型的不连续性给多个摩擦点的黏滞--滑移(stick-slip)运动状态切换(非光滑事件)的判断和动力学方程的求解带来困难[3,5].修正的库伦摩擦模型虽然避免了摩擦力的不连续性给数值计算带来的困难,但不能反映摩擦的静--动态特性[6,13].有人将线性互补问题(LCP)的相关理论引入到具有单边约束非光滑多体系统动力学的研究中[5,14],有效地解决了非光滑事件的判断.有人基于接触模型和修正的库伦摩擦模型,给出了考虑铰链间隙的机械多体系统动力学的建模方法与计算方法[6,13],该方法仅适用于无黏滞--滑移运动状态切换的机械系统.基于线性互补理论,有人给出了考虑滑移铰间隙的平面多刚体系统动力学的建模方法与数值算法[15],应用时间步进算法可有效判断物体间的接触--分离和黏滞--滑移等非光滑事件,但当间隙充分小时,算法存在违约问题.将约束稳定化方法嵌入到时间步进法中,有人给出了非光滑多刚体系统动力学数值算法,有效地抑制了约束的漂移[16].有人将间隙充分小的滑移铰视为双边约束,基于线性互补理论,结合鲍姆加藤(Baumgarte)约束稳定化方法,给出了滑移铰含库伦干摩擦多刚体系统动力学的建模与计算方法[17-18],应用事件驱动算法可有效地分析滑移铰的黏滞--滑移运动状态的切换,并有效地抑制了约束的漂移.有人做了进一步的推广,给出的算法既可以判断非光滑事件,又可以求解理想铰链的约束力和非定常约束的驱动力[18-19],但该方法的互补维数较高,影响了数值求解的计算效率.有人采用线性互补方法给出了含摩擦多体系统动力学方程的计算方法,既可以求解非光滑铰链的约束力也可以求解理想铰链的约束力或驱动约束力,且理想铰链的约束力或驱动约束力的求解不参与互补运算,可提高计算效率[20-21].但其方法不适用于含碰撞的非光滑多体系统.本文将研究具有完整理想定常约束(理想铰链约束)和非定常约束(驱动约束)的平面多刚体系统,且考虑非光滑接触面的接触碰撞与摩擦问题.将非光滑接触面的法向接触力表示成嵌入量与嵌入速度的函数;摩擦力采用库伦干摩擦模型;由第一类拉格朗日方程和鲍姆加藤约束稳定化方法导出其动力学方程;利用事件驱动算法,将物体接触点的黏滞--滑移运动状态切换的判断问题以及处于黏滞状态时静摩擦力的计算问题转化成线性互补问题的求解.该方法与传统方法相比,互补量仅包含了与摩擦有关的量,可降低线性互补方程的维数,提高计算效率.最后通过数值算例分析了具有偏心转子滑块机构在水平地面上运动的动力学特性,并验证了本文给出方法的有效性. 设平面多刚体系统由N个刚体组成,且具有完整理想定常约束(铰链约束)和非定常约束(电机驱动约束);考虑物体接触与分离界面的摩擦与碰撞.设χCi,yCi,θi(i=1,2,···,N)为第i个刚体在惯性系中的质心坐标和刚体的转角,则该多体系统的位形坐标可用向量q=[χC1,yC1,θ1,···,χCN,yCN,θN]T描述.1.1 法向接触力模型当物体间接触或碰撞时,考虑物体的局部变形,用δ表示物体的法向嵌入量,˙δ为嵌入速度.其法向接触力FN可表示为[2,9]式中,K和c分别为广义刚度系数和广义阻尼系数(K,c与接触物体的几何尺寸、材料性质有关),指数n通常的取值范围为[1,1.5],由于δ和可表示为q,的函数[6,8],由式(1)可知,法向接触力可以表示为q,的函数.1.2 切向接触力模型根据库伦干摩擦模型,作用在物体接触面上的摩擦力在接触面切向上的投影Fτ与法向接触力之间的关系可以表示为[3]式中,µ,µ0分别为物体间的动、静摩擦因数;,分别为接触点的相对速度和相对切向加速度;sgn(·)为符号函数,其定义如下Sgn(·)为多值函数[3,15],其定义如下设该系统有 f个摩擦点,则将所有的Fτi(i=1, 2,···,f)表示成向量形式Fτ=[Fτ1,Fτ2,···,Fτf]T.2.1 非光滑动力学方程设系统具有s∗个完整理想定常约束和s个非定常约束,由局部递推法[22]列写相应的约束方程,并可表示为下列矩阵形式将式(5)和式(6)表达为由第一类拉格朗日方程可得到该系统的动力学方程式中,M为广义质量矩阵;为约束方程的雅克比矩阵;λ=[,···,∗,,···,]为拉格朗日乘子列向量,其中,(i=1,2,···s∗)为定常约束方程即式(5)对应的约束力(如铰链约束力);i(i=1,2,···,)为非定常约束方程即式(6)对应的约束力(如电机的驱动力偶矩);Q为系统中主动力的广义力,Qf为系统中摩擦力的广义力.2.2 库伦摩擦定律的互补关系由于摩擦力的存在,由式(2)可知动力学方程在非光滑点处τ=0)是不连续的,这给方程的求解带来了困难,难点主要在于黏滞--滑移状态切换(非光滑事件)的判断问题以及处于黏滞状态时摩擦力的计算.为解决该问题,利用前人工作的基础[3],通过建立库伦摩擦定律的互补关系,将非光滑事件的判断及摩擦力的计算转化为线性互补问题的求解.设在某时刻,该系统中有H个接触点的相对速度为零,即τi=0(i=1,2,···,H),设接触点的静摩擦因数为µ0i,用矩阵形式可将正向摩擦余量和负向摩擦余量表示为[3]其中µ0=dig{µ0i},FN为H个接触点的法向接触力的列向量,为此时静滑动摩擦力的列向量.将式(9)中的两式相加可得当τi=0时,接触点切向的正向加速度和负向加速度分别定义为[18]将上式相减并写成向量形式可得正、负向摩擦余量(,)和正、负向切向加速度(,)存在以下互补关系[3,18]2.3 动力学方程的算法应用鲍姆加藤约束稳定化方法[6],方程(8)中的第2式改写为其中,α,β为大于零的常数[23-24],由上式推导可得由动力学方程(8)的第1式求出将其代入式(15)可得将摩擦力的广义力表示成矩阵形式其中G1和G2中的各元素是坐标q的函数.上式中等式右端的第一项为动滑动摩擦力的广义力,第二项为静滑动摩擦力的广义力,则该系统的动力学方程可以写为将上式改写成式中B3=B1+B2G1.物体接触点的相对速度可以表示为系统状态变量的函数,即τi=τi(q,).当所有接触点的相对速度均不为零时,即τi≠0(i=1,2,···,f),其动滑动摩擦力为已知量,可由式(2)的第一式计算得到,其中法向接触力FNi由式(1)计算得到.将摩擦力列向量带入动力学方程(20),可直接应用常微分方程的数值计算方法求解该方程.若系统中有 H个接触点的相对速度为零,即τi=0(i=1,2,···,H),此时这些接触点的静滑动摩擦力F为未知量,由式(2)和式(4)可知,该静滑动摩擦力不仅与q,q˙有关,还与q¨有关.其他相对速度不为零的接触点的动滑动摩擦力仍为已知量.为计算这H个接触点的静滑动摩擦力,将这H个点的相对速度表达式表示成列向量,将其对时间求导后可得式中,是状态变量q和的函数.将上式代入式(12),有将式(20)代入式(22),整理可得再将式(9)的第2式代入式(23),有将式(10)与式(24)联立,可以得到下列线性互补方程应用线性互补问题的数值算法,由式(25)求解出,再由式(9)中的第二式求出,将其代入式(20),应用常微分方程的数值解法求解该方程.源于平板夯机的具有偏心转子的机械系统,如图1所示.设夯机的主体为长为2a,高为2b的非均质矩形箱体,其质量为m1,几何中心O1的坐标为χO1,yO1,质心C1的坐标为χC1,yC1,夯机底板与地面的夹角为θ1;质量为m2偏心距为e的转子通过电机与夯机箱体连接,电机的转轴A视为光滑柱铰链,电机驱动转子的相对角速度为ω,偏心转子质心C2的坐标为χC2,yC2,C2A与水平面的夹角为θ2;夯机工作时,其箱体与地面发生接触与碰撞,法向接触力由公式(1)给出,其中n=1.5;设夯机与地面间的静、动摩擦系数分别为µ0,µ.设铰链A和夯机箱体质心C1相对夯机箱体的几何中心O1的坐标分别为(Aχ,Ay)和(Cχ,Cy),则该铰链A的定常约束方程和电机驱动的非定常约束方程可表示为其中参考HZR-92型平板夯的主要参数,取值如下:m1= 92.0 kg,m2=7.0 kg,a=0.2 m,b=0.128 m,e= 0.018 m,JC1=0.4423 kg·m2,JC2=0.00247 kg·m2;箱体质心C1和电机轴A相对箱体几何中心的坐标分别为:Cχ=−0.033 m,Cy=0.032m,Aχ=0.03 m, Ay=0.124 m.取计算步长h=1µs,鲍姆加藤违约修正系数为[24]α=1×106,β=1.4×106.情况一:设夯机的电机转速为ω =420 rad/s,在中等硬度路面作业,其接触面的相关参数[25-26]: K=3.1 MN/m1.5,c=23 kNs/m2,摩擦系数为µ0=0.6, µ=0.45.用本文给出的方法对其进行数值仿真.图2~图4分别给出了夯机位形坐标χO1,yO1,θ1的时间历程图.由图2(a)可知,夯机移动的平均速度为19.58 m/m in;由图2(b)~图4可知,夯机的稳态运动为周期运动,夯机箱体上下跳动的同时还伴有俯仰运动.图5给出了地面法向接触力的时间历程图.由图可知,法向接触力为零时,夯机与地面没有接触,是处于腾空状态.图6给出了铰链A处的约束力FA的时间历程图,该约束力为铰链A的定常约束方程对应的约束力.图7给出了电机驱动力矩Me的时间历程图,该驱动力矩为非定常约束方程对应的约束力.图8给出了定常约束的时间历程图.其中红色线为鲍姆加藤约束稳定化方法的计算结果,其值‖Φ∗‖<0.075 mm,并当时间充分大时,该值趋于零;虚线为无约束稳定化方法的计算结果.由于该系统存在冲击与碰撞现象,因此在没有违约修正时,计算仿真结?果?不?满?足约束方程,使运动失真.对于非定常约束‖Φ‖=‖φ‖<10−6rad.情况二:为验证本文给出的算法的有效性,设夯机与坚硬路面的接触力参数为K=490 MN/m1.5, c=33 MNs/m2;夯机与地面的静、动摩擦因数分别为µ0=0.7,µ=0.52.为使得夯机不脱离地面,设电机的驱动角速度ω=25 rad/s.图9和图10分别给出了不同偏心距e时,地面作用于夯机上的摩擦力Fτ(红色线)和接触点切向速度˙gτ(蓝色线)的时间历程图.当e=0.10 m时,夯机始终处于黏滞状态(如图9所示),当e=0.15 m时,夯机有黏滞--滑移运动状态的切换(如图10所示).该计算结果与假设刚性路面且用试算法计算出的结果完全吻合.本文基于接触力学与线性互补理论,利用现有的接触力模型,将物体间的法向接触力表示成嵌入量与嵌入速度的非线性函数,因此可根据嵌入量计算接触点的法向力并由此可判断物体间的接触与分离;接触点的摩擦力采用库伦干摩擦模型,建立了摩擦余量与接触点切向加速度的互补关系式,利用线性互补算法可判断物体接触点间的黏滞--滑移运动状态的切换和静滑动摩擦力的计算;本文给出的方法与传统方法相比,法向接触力不参与互补运算,可降低线性互补方程的维数,提高其计算效率.应用第一类拉格朗日方程并结合鲍姆加藤约束稳定化方法,建立了具有完整理想定常约束(理想铰链约束)和非定常约束 (驱动约束)平面多刚体系统动力学方程,由该动力学方程不仅可以求解系统的运动量、法向接触力、切向摩擦力,还可以求解铰链约束力和驱动约束力,弥补了原有方法的不足,并可有效地抑制约束的漂移.最后通过算例说明了本文给出算法的有效性.1)The project was supported by the National Natural Science Foundation of China(11372018).2)Wang Qi,professor,research interests:dynam ics and control of multibody system,E-mail:*****************【相关文献】1董富祥,洪嘉振.多体系统动力学碰撞问题研究综述.力学进展,2009,39(3):352-359(Dong Fuxiang,Hong Jiazhen.Review of impact problem for dynam ics of multibodysystem.Advances in Mechanics,2009,39(3):352-359(in Chinese))2曹登庆,初世明,李郑发,等.空间可展机构非光滑力学模型和动力学研究.力学学报,2013,45(1):4-14(Cao Dengqing,Chu Shiming,Li Zhengfa,et al.Study on the non-smooth mechanical model and dynam ics for space deployable mechanism.Chinese Journal of Theoretical and Applied Mechanics,2013,45(1):4-14(in Chinese))3王琪,庄方方,郭易圆,等.非光滑多体系统动力学数值算法的研究进展.力学进展,2013,43(1):101-111(Wang Qi,Zhuang Fangfang,Guo Yiyuan,et al.Advances in the research on numerical methods for non-smooth dynam ics of multibody systems.AdvancesinMechanics.2013,43(1):101-111(in Chinese))4王庚祥,刘宏昭.多体系统动力学中关节效应模型的研究进展.力学学报,2015,47(1):31-50(Wang Gengxiang,Liu Hongzhao. Research progress of joint e ff ects model in multibody system dynamics.JournalofTheoreticaland Applied Mechanics,2015,47(1): 31-50(in Chinese))5 Pfei ff er F,Glocker C.Multibody Dynamics w ith Unilateral Contacts.New York:John Wiley&Sons.Inc.19966 Flores P,mbrosio J.Kinematics and Dynam ics of Multibody Systems w ith Imperfect Joints.Berlin:Springer,20087刘丽兰,刘宏昭,吴子英,等.机械系统中摩擦模型的研究进展.力学进展,2008,38(2):200-213(Liu Lilan,Liu Hongzhao,Wu Ziying,et al.An overview of friction models in mechanical systems. Advances in Mechanics,2008,38(2):200-213(in Chinese))8 MachadoM,Moreira P,Flores pliant contact force models in multibody dynam ics:Evolution of the Hertz contact theory.Mechanism and Machine Theory,2012,53:99-121 9刘才山,陈滨,王玉玲.考虑摩擦作用的多柔体系统点--面碰撞模型.中国机械工程,2000,11(6):616-619(Liu Caishan,Chen Bin,Wang Yuling.The point-surface impact model considering the friction e ff ect in fl xible multi-body system.China MechanicalEngineering,2000,11(6):616-619(in Chinese))10丁千,翟红梅.机械系统摩擦动力学研究进展.力学进展,2013, 43(1):112-131(Ding Qian,Zhai Hongmei.The advance in researches of friction dynam ics in mechanics system.Advances in Mechanics,2013,43(1):112-131(in Chinese))11 Pennestri E,Valentini P P,Vita L.Multibody dynam ics simulation of planar linkages w ith Dahl friction.Multibody Syst.Dyn.,2007, 17:321-34712 Dopico D,Luaces A,Gonzalez M,et al.Dealing w ith multiple contacts in a human-in-the-loop application,Multibody System Dynamics,2011,25(2):167-18313 Flores P,Ambrosio J.Translational joints w ith clearance in rigid multibodysystems.ASME Journal of Computational and Nonlinear Dynamics,2008,3:011007(1-10) 14 Pfei ff er F,Foerg M.Uibrich H.Numerical aspects of non-smooth multibody dynam puter Methods in Applied Mechanics and Engineering,2006,195:6891-690815 Flores P,Leine R,Glocker C.Modeling and analysis of planar rigid multibody systems w ith translational clearance joints based on the non-smooth dynam ics approach.Multibody System Dynamics, 2010,23:165-19016 Anitescu1 M,Hart G D.A constraint-stabilized time-stepping approach for rigid multibody dynam ics w ith joints,contact and friction.Int J Numer MethEngng,2004,60:2335-237117 Wang Q,Peng H L,Zhuang F F.A constraint-stabilized method for multibody dynamics w ith friction-a ff ected translational joints based on HLCP.Discrete and Continuous Dynamical Systems Series B, 2011,16(2):589-60518 Zhuang F F,Wang Q.Modeling and simulation of the nonsmooth planar rigid multibodysystems w ith frictional translational joints. Multibody Syst Dyn,2012,29:403-42319 Zhuang F F,Wang Q.Modeling and analysis of rigid multibody systems w ith driving constraints and frictional translation joints.Acta Mechanica Sinica,2014,30(3):437-44620王晓军,王琪,庄方方.含摩擦滑移铰及驱动约束多刚体系统数值算法.动力学与控制学报,2014,12(4):335-340(Wang Xiaojun, Wang Qi,Zhuang Fangfang.The numerical method for multibody system w ith frictional translational joints and driving constraints. Journal of Dynamics and Control,2014,12(4):335-340(in Chinese))21范新秀,王琪.车辆纵向非光滑多体动力学建模与数值算法研究.力学学报,2015,47(2):301-309(Fan Xinxiu,Wang Qi.Research on modeling and simulation of longitudinal vehicle dynam ics based on non-smooth dynam ics of multibody systems.Journal of Theoretical and Applied Mechanics,2015,47(2):301-309(in Chinese))22洪嘉振.多体系统动力学.北京:高等教育出版社,1999(Hong putation Dynam ics of Multi-body Systems.Beijin: Higher Education Press,1999(in Chinese))23 Neto M A,Ambr´osio J.Stabilization methods for the integration of DAE in the presence of redundant constraints.Multibody Syst.Dyn., 2003,10:81-10524 Flores,P,Machado,M,Seabra,E,et al.A parametric study on the Baumgarte stabilization method for forward dynamics of constrained multibody put.Nonlinear Dyn.,2011,6(1): 011019-01102725杨孟余,冯德成,沙爱民,等.公路沥青路面设计规范.北京:人民交通出版社,2006(Yang Mengyu,Feng Decheng,Sha Aiming,et al.Specificatio for Design of Highway Asphalt Pavement.Beijing: China Communications Press,2006(in Chinese))26申爱琴,张艳红,郭寅川,等.三类沥青路面结构力学响应的对比分析.长安大学学报,2009,29(4):1-7(Shen Aiqin,Zhang Yanhong, Guo Yinchuan,et parative analysis of mechanical response of three typical asphalt pavement structures.Journal of Chang’an University,2009,29(4):1-7(in Chinese))。
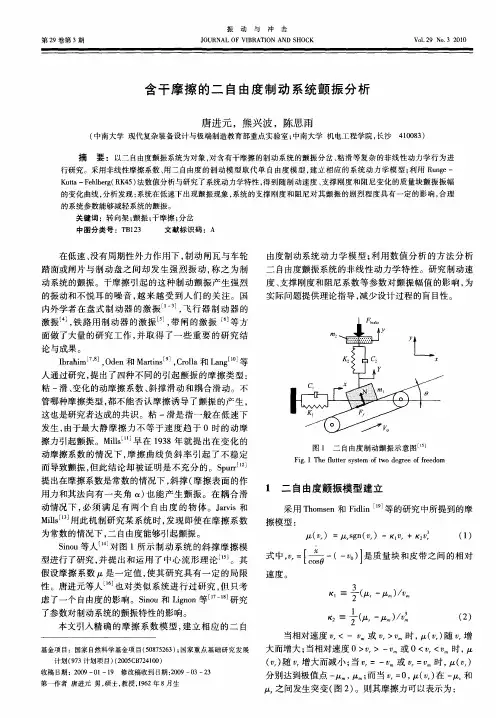
干摩擦自激振动摘要:本文对自激振动产生的条件,以及自激振动的特征进行深入的分析,并举了各种生活中和机械加工中自激振动和强迫振动的实例。
也提出了解决干摩擦自激振动的办法。
引起的自激振动广泛地存在于工程实际中,且伴随着粘滞运动的产生,所以对具有粘滞特性的动力学系统的研究具有理论和实际意义。
虽然干摩擦的非光滑性给系统动力学解析分析带来很大困难,对此类问题的研究主要采用数值分析和实验研究,但在一定条件下,进行解析分析还是必要和可能的干摩擦自激振动概述即课题的提出:所谓自激振动,是指振动系统通过本身的运动,不断地向振动系统馈送能量,它与外界激励无关,完全依赖自身的运动来激励。
自激振动也称为负阻尼振动,因为这时候振动系统的阻尼是负数,由振动物体运动所产生的阻尼力非但不阻止振动,反而进一步激励振动,从而形成并维持振动。
自激振动是一种独特而普遍的现象。
独特是指其机理,普遍是指这一现象广泛存在于自然界和工程中。
能产生自激振动的系统,称为自振系统。
【2】自振系统具有以下特点:自振系统是非保守系统,在自激振动的过程中有能量的补充和耗散自振系统是自治系统。
自激振动是在不承受周期性外力作用下所产生的周期振动,描述系统振动的微分方程不显含时间t,这与一般非线性系统在周期性外力作用下的受迫振动不同,受迫振动的振幅还与初始条件有关。
【5】自激振动的现象表现为系统在常能源即数学表达式不显含时间t 的能源支持下做固定频率和固定振幅的振动,这一现象不同于在线性振动和一般非线性振动中的一切情况。
【4】在这些情况中,保守系统自由振动是一种理想化了的即不考虑能量耗散的振动,所维持的定常振动在实际系统中并不存在。
考虑了实际上存在的阻尼之后,自由振动是衰减的。
在这些情况中,要维持定常的振动必须有一个显含时间t的干扰力自激振动的发生需要两个条件:第一,系统在平衡点附近的不稳定性t第二,迫使系统的工作点略为偏离平衡点的外界干扰。
由此可见,自激振动并非不需要外界的激励,自激振动的机理就是常能源能够对振动系统的周期运动做正功,补充系统因为实际上存在的阻尼而耗散的能量,从而维持定常的振动日常生活中的自激振动现象是非常普遍的。
《空间机械臂间隙与摩擦动力学仿真分析》篇一一、引言空间机械臂作为空间技术的重要组成部分,其动力学性能的稳定性和精确性对于完成复杂空间任务具有重要意义。
而间隙与摩擦现象是机械臂动力学系统中的常见问题,直接影响机械臂的精确度和运动稳定性。
因此,本文将对空间机械臂的间隙与摩擦动力学进行仿真分析,以期为空间机械臂的设计和优化提供理论依据。
二、空间机械臂系统概述空间机械臂系统主要由驱动系统、机械结构、控制系统等部分组成。
其中,机械结构是机械臂的主体部分,包括关节、连杆等部分。
由于空间环境的特殊性,空间机械臂需要具备高精度、高稳定性的运动特性,因此对其动力学性能的要求十分严格。
三、间隙与摩擦动力学模型建立在空间机械臂系统中,间隙和摩擦现象普遍存在。
间隙主要来源于机械结构中的连接部位,如关节、轴承等;而摩擦则主要来源于机械结构中的接触部位,如连杆、末端执行器等。
为了准确分析间隙与摩擦对空间机械臂动力学性能的影响,需要建立相应的动力学模型。
本文采用拉格朗日方程和库伦摩擦模型,建立了空间机械臂的间隙与摩擦动力学模型。
其中,拉格朗日方程用于描述机械臂的动力学特性,库伦摩擦模型用于描述摩擦力的变化规律。
同时,考虑到间隙的存在,我们在模型中引入了间隙元素,以更准确地反映机械臂的实际运动情况。
四、仿真分析利用所建立的动力学模型,我们进行了空间机械臂的间隙与摩擦动力学仿真分析。
仿真过程中,我们设置了不同的间隙和摩擦系数,观察了机械臂的运动轨迹、速度、加速度等动力学参数的变化情况。
仿真结果表明,间隙和摩擦对空间机械臂的动力学性能具有显著影响。
间隙的存在会导致机械臂的运动出现抖动、失稳等现象,降低运动的精确度;而摩擦则会使得机械臂的运动受到阻力,影响其运动速度和加速度。
此外,我们还发现,不同的间隙和摩擦系数对机械臂的动力学性能影响程度不同,需要根据实际需求进行合理设计。
五、结论通过对空间机械臂的间隙与摩擦动力学仿真分析,我们得出了以下结论:1. 间隙和摩擦是影响空间机械臂动力学性能的重要因素,需要在设计过程中进行充分考虑。