
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920339345.8
(22)申请日 2019.03.18
(73)专利权人 何健
地址 021008 内蒙古自治区呼伦贝尔市海
拉尔区上东城小区11-2-902
(72)发明人 何健
(74)专利代理机构 北京君泊知识产权代理有限
公司 11496
代理人 王程远
(51)Int.Cl.
B25J 9/00(2006.01)
B25J 19/00(2006.01)
(54)实用新型名称
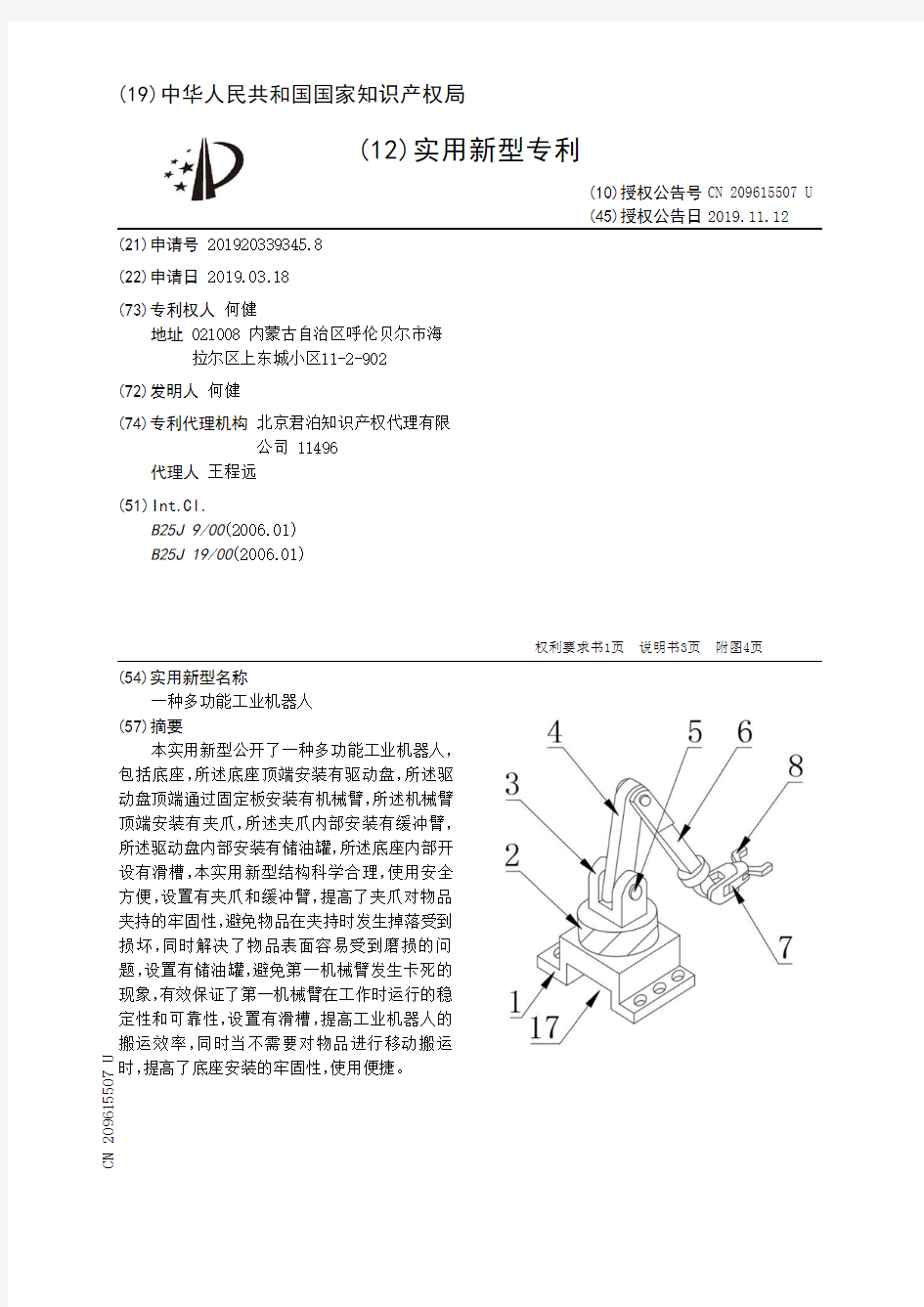
一种多功能工业机器人
(57)摘要
本实用新型公开了一种多功能工业机器人,
包括底座,所述底座顶端安装有驱动盘,所述驱
动盘顶端通过固定板安装有机械臂,所述机械臂
顶端安装有夹爪,所述夹爪内部安装有缓冲臂,
所述驱动盘内部安装有储油罐,所述底座内部开
设有滑槽,本实用新型结构科学合理,使用安全
方便,设置有夹爪和缓冲臂,提高了夹爪对物品
夹持的牢固性,避免物品在夹持时发生掉落受到
损坏,同时解决了物品表面容易受到磨损的问
题,设置有储油罐,避免第一机械臂发生卡死的
现象,有效保证了第一机械臂在工作时运行的稳
定性和可靠性,设置有滑槽,提高工业机器人的
搬运效率,同时当不需要对物品进行移动搬运
时,提高了底座安装的牢固性,
使用便捷。权利要求书1页 说明书3页 附图4页CN 209615507 U 2019.11.12
C N 209615507
U
权 利 要 求 书1/1页CN 209615507 U
1.一种多功能工业机器人,包括底座(1),其特征在于:所述底座(1)顶端安装有驱动盘
(2),所述驱动盘(2)顶端两侧均安装有固定板(3),两个所述固定板(3)之间安装有固定轴(5),所述固定轴(5)外部套接有第一机械臂(4),所述第一机械臂(4)顶端安装有第二机械臂(6),所述第二机械臂(6)顶端通过固定螺母安装有卡座(7),所述卡座(7)内部两侧均安装有夹爪(8),所述夹爪(8)内部一侧通过压缩弹簧(10)安装有缓冲臂(9),所述卡座(7)内部开设有升降槽(11),所述升降槽(11)内部通过液压杆(12)安装有托臂(13),所述驱动盘(2)外壁两侧均开设有注油嘴(15),所述驱动盘(2)内部两侧均安装有储油罐(14),所述固定板(3)内部安装有喷头(16)。
2.根据权利要求1所述的一种多功能工业机器人,其特征在于:所述缓冲臂(9)一侧贴覆有橡胶垫片,且橡胶垫片表面均匀开设有防滑纹。
3.根据权利要求1所述的一种多功能工业机器人,其特征在于:所述底座(1)外部涂抹有防锈漆,且防锈漆外部贴覆有防护膜。
4.根据权利要求1所述的一种多功能工业机器人,其特征在于:所述底座(1)底端中部开设有滑槽(17),所述滑槽(17)内壁两侧均开设有导向槽(18),所述导向槽(18)内部安装有滚珠(19),所述底座(1)两侧均开设有螺栓过孔(20),所述滑槽(17)顶端两侧均铰接有限位板(21)。
5.根据权利要求1所述的一种多功能工业机器人,其特征在于:所述注油嘴(15)内部通过螺纹嵌入安装有防尘帽。
6.根据权利要求4所述的一种多功能工业机器人,其特征在于:所述滚珠(19)的直径等于导向槽(18)的内直径。
2
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910213961.3 (22)申请日 2019.03.20 (71)申请人 杭州申昊科技股份有限公司 地址 311121 浙江省杭州市余杭区仓前街 道龙潭路21号 (72)发明人 陈如申 黎勇跃 蔡兆祝 杨克己 (74)专利代理机构 北京国贝知识产权代理有限 公司 11698 代理人 柯俊 (51)Int.Cl. B25J 11/00(2006.01) B25J 9/12(2006.01) H02G 1/02(2006.01) (54)发明名称 一种巡检机器人 (57)摘要 本发明公开了一种巡检机器人,包括控制 箱、主支架、四连杆机构、行走机构和安全机构, 所述主支架的中部下侧设有所述控制箱,所述主 支架的两端上部设有所述四连杆机构,所述四连 杆机构的顶部侧面设有所述行走机构,所述行走 机构上设有所述安全机构。该巡检机器人,越障 能力强,爬坡角度大,结构稳固,体积小,质量轻、 行走时安全性好,控制精度高,实时性好,尤其是 方便调整,可以顺利越障, 提高越障的效率。权利要求书1页 说明书6页 附图8页CN 109773808 A 2019.05.21 C N 109773808 A
权 利 要 求 书1/1页CN 109773808 A 1.一种巡检机器人,其特征在于:包括控制箱、主支架、四连杆机构、行走机构和安全机构,所述主支架的中部下侧设有所述控制箱,所述主支架的两端上部设有所述四连杆机构,所述四连杆机构的顶部侧面设有所述行走机构,所述行走机构上设有所述安全机构。 2.根据权利要求1所述的一种巡检机器人,其特征在于:所述四连杆机构包括基座连杆、关节电机、升降杆驱动电机和升降支架,所述基座连杆的上部水平设置有升降杆驱动电机,所述基座连杆的下部竖直设置有关节电机,所述关节电机连接主支架,所述升降杆驱动电机连接有主动关节组件,所述主动关节组件连接于所述升降支架的上部,所述基座连杆的下部设有从动关节组件,所述从动关节组件连接于所述升降支架的下部。 3.根据权利要求2所述的一种巡检机器人,其特征在于:所述主动关节组件包括第一主动关节、第二主动关节和主动关节连杆,所述主动关节连杆的左端连接有第一主动关节,所述第一主动关节的中部套接升降杆驱动电机的输出轴,所述主动关节连杆的右端连接有第二主动关节,所述第二主动关节的中部套接于所述升降支架的上部。 4.根据权利要求2所述的一种巡检机器人,其特征在于:所述从动关节组件包括第一从动关节、第二从动关节和从动关节连杆,所述从动关节连杆的左端连接有第一从动关节,所述第一从动关节的中部套接于所述基座连杆的下部,所述从动关节连杆的右端连接有第二从动关节,所述第二从动关节的中部套接于所述升降支架的下部。 5.根据权利要求2所述的一种巡检机器人,其特征在于:所述升降支架呈倒“L”型,所述升降支架包括竖直杆部和水平杆部,所述竖直杆部的顶部侧面连接所述主动关节组件,所述竖直杆部的底部侧面连接所述从动关节组件,所述水平杆部侧部连接所述行走机构。 6.根据权利要求1所述的一种巡检机器人,其特征在于:所述行走机构包括驱动电机、联轴器、驱动轴和驱动轮,所述驱动电机安装于所述升降支架的下部,所述联轴器、驱动轴和驱动轮均设置有两副,所述驱动电机的两端均设有输出轴,所述联轴器连接所述联轴器,所述联轴器连接所述驱动轴,所述驱动轴连接所述驱动轮。 7.根据权利要求6所述的一种巡检机器人,其特征在于:所述驱动轴的外部套设有驱动轴外壳。 8.根据权利要求1所述的一种巡检机器人,其特征在于:所述安全机构包括安全卡座和锁紧装置,所述锁紧装置包括锁紧轮组件、锁紧轮杆、锁紧轮杠杆和锁紧轮电机,所述锁紧轮电机固定安装于所述安全卡座的侧部,所述锁紧轮电机的输出端铰接于锁紧轮杠杆的一端,所述锁紧轮杠杆的另一端连接于所述锁紧轮杆的中部,所述锁紧轮杠杆的中部设有支点杆,所述支点杆固定安装于所述安全卡座上,所述锁紧轮杆的两端设有锁紧轮组件。 9.根据权利要求8所述的一种巡检机器人,其特征在于:所述安全卡座靠近锁紧轮电机一侧的端部设有安全卡旋转轴,所述安全卡旋转轴连接有安全卡旋转电机,所述安全卡旋转电机的顶部设有安全卡旋转电机座,所述安全卡旋转电机座设置于行走机构上。 10.根据权利要求8所述的一种巡检机器人,其特征在于:所述锁紧轮组件包括U型锁紧轮轴承架、缩紧轮和缩紧轮轴,所述U型锁紧轮轴承架的下部通过紧固件固定安装于所述锁紧轮杠杆的两端,所述缩紧轮通过缩紧轮轴可旋转地安装于所述U型锁紧轮轴承架的内侧面上。 2
机器人专利分析 机器人分析专利艳涛摘编 20世纪90年以来,特别是2000年以来,全球家一、家用服务机器人分析用、专业和军用服务机器人及工业机器人专利申请 1.家用服务机器人专利申请趋势数量持续快速增长,新的技术条目不断涌现,相关技术越来越受到世人关注,相关研究和开发正在快通过对DII专利数据库进行检索,共检索到与家速发展。用服务机器人研究相关的专利(族)4839件(数据检 本文通过对家用服务机器人、专业服务机器人、索日期为2010年5月5日)。图1给出了家用服务机器军用服务机器人、工业机器人和模块化机器人五个方人专利数量随年度变化的情况。从图1可以看出,自 20世纪90年代以来,家用服务机器人专利申请数量持向的全球重要专利进行检索和统计,对全球机器人领 域的专利技术申请和发展态势进行了分析。分析采用
的数据来源于德温特创新索引(DII)专利数据库,该数据库收录来自世界40多个专利机构的 1000多万个基本发明专利,3000多万 个专利,所有的专利文献都以专利族 为单位进行组织。 在进行相关知识调研的基础 上,业内专家多次沟通,设定检索策 略,并据此构建国内和国际服务机 器人、工业机器人及重点技术专利 分析数据集。借助于汤姆森数据分 析器(TDA)、Aureka、ACCESS、 EXCEL等工具,对数据进行整理, 从不同角度揭示机器人技术发展态 续快速增长(由于专利的公开或授权存在 一定的滞后期,近3年数据仅供参考),表
明家用服务机器人相关技术越来越受到关 注,相关研发正在快速发展。 2. 家用服务机器人专利技术国家/地区分析 图2给出了家用服务机器人国际专 利受理量的国家排名情况。可以看出, 家用服务机器人专利受理数量最多的前 10个国家/地区依次是日本(JP)、韩国 (KR)、美国(US)、中国(CN)、 德国(DE)、法国(FR)、欧洲专利 局(EP)、中国台湾(TW)、英国 (GB)、加拿大(CA)。日本和韩国受 理的专利数量占有绝对优势,日本专利局图3 家用服务机器人国际专利受理量前10国年度受理量分布的受理数量最多(2064件),约占总量的 42.5%,韩国专利局的受理数量约占总量的 30%(1460件)。其次是美国、中国、德国,受理数 量在200-600件之间。由此可见,日本、韩国、 美国、中国、德国是家用服务机器人的重要研 发和竞争区域。
国内机器人领域的专利态势分析 摘要:文章利用国家专利文摘数据库(CNABS)对国内机器人领域的专利申请进行了检索统计,分析了专利申请量、申请人、涉及的技术领域、法律状态等方面的信息,找出了其中的趋势和特点,为我国机器人产业的发展提供参考。 关键词:机器人;专利态势;分析 引言 在现代化自动生产线中,机器人得到越来越广泛的应用,由此带来的对机器人专利技术的保护也越来越引起企业、社会的重视。研究机器人产业技术的发展趋势,准确评估目前国内技术水平,对于推动我国机器人产业的发展具有重要意义。 1 国内机器人领域专利分布状况 1.1 申请量的年度分布 机器人在国际专利分类表中集中的分类号为B25J,为此在中国专利数据库(CNABS)中,利用关键词、分类号进行联合检索,构造检索式B25J/IC or (机器人or 机械臂or 机械手or robot?)进行检索,并对其中涉及的发明专利按照申请年度进行统计,得到图1所示的申请量年度分布图。
图1 申请量年度分度 图2 主要申请人 图1示出了2001年至2014年机器人领域中国发明专利申请的逐年变化情况,从图中可以看出,进入二十一世纪,我国机器人专利呈逐年递增的态势发展,每年新增专利就有2000件左右,反映了国内对机器人专利保护的不断重视。 1.2 申请人区域分布 通过以国内机器人技术著名的企业、高等院校为申请人进行检索,得到图2所示的机器人领域中国发明专利排名前十的申请人,图中数据显示了其在2001至1014期间的专利申请量。可以看出中国科学院在机器人技术上具有明显优势,至2001年以来,已提交800多件机器人相关的发明专利申请,中国科学院汇聚了国内学术界的顶尖人才,拥有最先进的实验设备,使得其能在机器人发明技术中独领风骚。其次就是以上海交通大学、哈尔滨工业大学为首的国内高校团队,高校团队在机器人学科建设上起到了基础性的作用,是机器人技术普及、发展的摇篮,发挥高校的积极能动性,是发展机器人产业的技术根本。 值得注意的是,国内企业在专利申请上并没有优势,排名前十的大陆企业中只有沈阳新松机器人自动化股份有限公司一家,表明了我国机器人领域发展还停留在实验室阶段,高校的技术成果并未有效地向企业转移再次,国外企业