微小型移动机器人专利技术
- 格式:ppt
- 大小:4.33 MB
- 文档页数:70
![一种可跳跃的移动机器人[发明专利]](https://uimg.taocdn.com/c83b6a1b700abb68a882fb24.webp)
专利名称:一种可跳跃的移动机器人
专利类型:发明专利
发明人:孙汉旭,张延恒,贾庆轩,张小飞,肖寒,赵伟,程勇,褚明,陈刚
申请号:CN201310205386.5
申请日:20130529
公开号:CN103273477A
公开日:
20130904
专利内容由知识产权出版社提供
摘要:本发明公开了一种可跳跃的移动机器人,包括弹簧锁定释放装置、弹簧跳跃机构、轮式移动装置、落地缓冲及姿态调整机构。
轮式移动装置和锁定释放装置通过弹簧跳跃机构连接。
弹簧锁定释放装置包括控制电机、一组减速齿轮,不完全齿轮和卷筒,卷筒通过钢丝绳与弹簧跳跃机构连接。
弹簧跳跃机构包括两根连杆,两根连根一端固结一对同步齿轮,另一端分别连接一个滑块,两个滑块之间连接拉伸弹簧并可沿着导轨滑动。
本发明通过自平衡系统控制轮式移动装置可实现机器人的平移运动,通过锁定释放装置控制跳跃机构,并结合水平方向的轮式移动实现机器人的跳跃运动;当机器人跳跃落地时可使用落地缓冲及姿态调整机构保护机器人本体并调整自身姿态。
申请人:北京邮电大学
地址:100876 北京市海淀区西土城路10号
国籍:CN
更多信息请下载全文后查看。
![无人迷你型搬运AGV[实用新型专利]](https://uimg.taocdn.com/be3f28a1c850ad02df80418c.webp)
专利名称:无人迷你型搬运AGV 专利类型:实用新型专利
发明人:卞波
申请号:CN202021108614.9申请日:20200616
公开号:CN212559344U
公开日:
20210219
专利内容由知识产权出版社提供
摘要:一种无人迷你型搬运AGV,属于自动导航车技术领域。
该无人迷你型搬运AGV包括车体组件、行走组件和升降组件,车体组件一侧设有一对货叉,货叉设有容槽;行走组件包括一对万向轮和一对差速轮机构;差速轮机构布置在容槽中,包括伺服电机和与伺服电机传动连接的驱动轮;万向轮设置在车体组件下方;升降组件包括液压机构和四组剪刀叉机构;剪刀叉机构两两一组分别设置在相应货叉容槽中;液压机构设有泵站电机,泵站电机设置在车体组件中,通过分流集流阀分别与四组剪刀叉机构的伸缩油缸连通。
本实用新型能够提高货物运输以及升降搬运的稳定性。
申请人:博众精工科技股份有限公司
地址:215200 江苏省苏州市吴江经济技术开发区湖心西路666号
国籍:CN
代理机构:苏州创元专利商标事务所有限公司
更多信息请下载全文后查看。
![一种方便移动的仿生机器人[发明专利]](https://uimg.taocdn.com/1e230fe67cd184254a353519.webp)
专利名称:一种方便移动的仿生机器人专利类型:发明专利
发明人:杨东岳
申请号:CN201811521780.9
申请日:20181213
公开号:CN109304701A
公开日:
20190205
专利内容由知识产权出版社提供
摘要:本发明公开了一种方便移动的仿生机器人,包括机体,所述机体的底部固定连接有对称的两个支撑板,所述支撑板的底部固定连接有安装U形板,两个所述安装U形板的内部转动连接有同一转动杆,所述转动杆的外表面固定连接有位于所述安装U形板内部的移动滚轮,右侧所述支撑板的左侧固定连接有驱动电机。
本发明设置驱动电机起到利用旋转杆和传动带控制转动杆进行转动的作用,转动杆的转动控制两端施力凸轮进行转动对受力块进行间断性施力的作用,受力块在间断性受力使动作板在复位弹簧的作用下进行左右往复动作,进而通过动作板左右往复动作达到推动开前方阻碍物的效果,从而通过在移动过程中推开阻碍物达到提升移动效率的效果。
申请人:大连蒂艾斯科技发展股份有限公司
地址:116039 辽宁省大连市甘井子区辛寨子街道小辛村
国籍:CN
代理机构:深圳市科吉华烽知识产权事务所(普通合伙)
代理人:吴肖敏
更多信息请下载全文后查看。
四轮式室内移动机器人发明专利说明书本发明涉及一种四轮式室内移动机器人,尤其是一种具有高度自主移动能力和精确导航能力的室内移动机器人。
随着科技的发展,室内移动机器人在生活和工作中发挥着越来越重要的作用。
然而,现有的室内移动机器人在面对复杂的室内环境时,往往表现出对环境的适应性不足,难以实现精确的导航和自主移动。
因此,开发一种能够适应复杂室内环境,具有高度自主移动能力和精确导航能力的室内移动机器人,具有重要的实用价值和社会意义。
本发明的目的是提供一种四轮式室内移动机器人,该机器人能够通过先进的传感器和算法,实现对复杂室内环境的精确感知和导航,具有高度的自主移动能力和实用性。
为达到上述目的,本发明采用以下技术方案:一种四轮式室内移动机器人,包括:车身主体:采用轻量化材料制成,内部配置有主控芯片、电源模块、驱动电机以及各类传感器接口。
轮子装置:配置在车身主体下方,包括四个独立驱动的轮子,每个轮子都配置有独立的电机和编码器,可以实现精确的移动控制。
传感器系统:包括激光雷达、高清摄像头、超声波传感器等,用于感知环境信息,实现精确的导航和避障。
导航和控制系统:采用先进的控制算法和导航算法,对传感器系统获取的环境信息进行处理和分析,实现机器人的自主导航和移动。
人机交互模块:包括触摸屏、语音识别系统等,使用户可以方便地对机器人进行操作和控制。
在实际操作中,四轮式室内移动机器人的工作流程如下:用户通过人机交互模块向机器人发出指令,机器人接收指令后开始运动。
传感器系统持续感知环境信息,包括地形、障碍物等,并将信息传输给导航和控制系统。
导航和控制系统根据获取的环境信息,结合机器人的当前位置和目标位置,计算出最优的移动路径。
驱动电机根据导航和控制系统输出的路径指令,驱动轮子装置进行精确的移动。
在移动过程中,机器人持续感知环境变化,并根据环境变化调整移动路径,实现自主导航和避障。
当机器人到达目标位置后,用户可以通过人机交互模块对机器人进行下一步操作的指令输入。
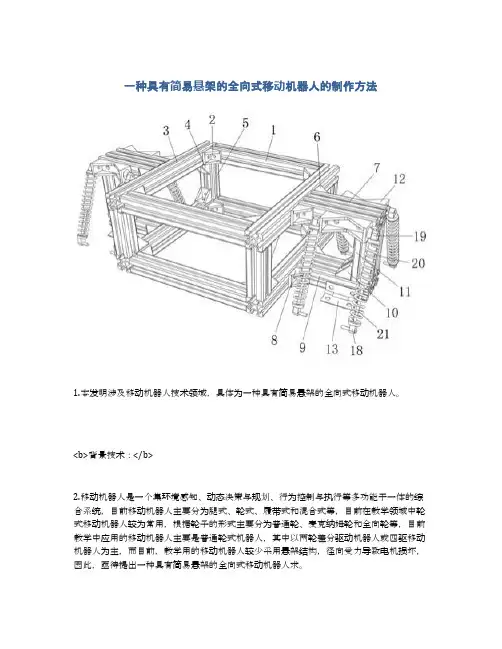
一种具有简易悬架的全向式移动机器人的制作方法1.本发明涉及移动机器人技术领域,具体为一种具有简易悬架的全向式移动机器人。
<b>背景技术:</b>2.移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统,目前移动机器人主要分为腿式、轮式、履带式和混合式等,目前在教学领域中轮式移动机器人较为常用,根据轮子的形式主要分为普通轮、麦克纳姆轮和全向轮等,目前教学中应用的移动机器人主要是普通轮式机器人,其中以两轮差分驱动机器人或四驱移动机器人为主,而目前,教学用的移动机器人较少采用悬架结构,径向受力导致电机损坏,因此,亟待提出一种具有简易悬架的全向式移动机器人求。
3.目前,现有的移动机器人,大多存在以下的不足:操作过程中对电机的径向损伤过大,大大降低了移动机器人的使用寿命,且不能保证移动机器人作业的灵活性,影响作业人员对移动机器人工作的使用,综上,现有的移动机器人大多还不能很好地契合实际需要。
<b>技术实现要素:</b>4.(一)解决的技术问题针对现有技术的不足,本发明提供了一种具有简易悬架的全向式移动机器人,主要为解决操作过程中对电机的径向损伤过大,大大降低移动机器人的使用寿命,且不能保证移动机器人作业的灵活性,影响作业人员对移动机器人工作使用的问题。
5.(二)技术方案为实现上述目的,本发明提供如下技术方案:一种具有简易悬架的全向式移动机器人,包括多个侧梁和多个横梁,多个所述侧梁和多个横梁之间固定连接有第一连接块,每个横梁的一侧固定连接有两个第二连接块,且两个第二连接块的另一侧均固定连接有第一立柱,其中两个所述横梁的另一侧固定连接有两个第二固定块,第二固定块的另一侧固定连接有第二连接梁,第二连接梁的一侧固定连接有转角合页,转角合页的另一侧固定连接有电机固定架,所述电机固定架的顶部固定连接有直流减速电机,直流减速电机输出轴的一端固定连接联轴器,联轴器的另一端固定连接有麦克纳姆轮,位于第一立柱顶端的所述横梁的一侧固定连接有两个第一固定块,第一固定块的另一侧固定连接有第一连接梁,所述第一连接梁的一侧固定连接有安装块,安装块的两侧分别转动连接有第二转动块,所述电机固定架的两侧分别转动连接有第一转动块,第一转动块与第二转动块之间固定连接有伸缩杆,伸缩杆的一侧套接有第一弹簧,第一弹簧的两端分别与第一转动块和第二转动块的一侧固定连接。
![便携可移动机器人及其操作方法[发明专利]](https://uimg.taocdn.com/1f878d841eb91a37f0115cab.webp)
专利名称:便携可移动机器人及其操作方法专利类型:发明专利
发明人:黄继铭
申请号:CN201710425765.3
申请日:20170608
公开号:CN108873877A
公开日:
20181123
专利内容由知识产权出版社提供
摘要:本发明公开一种便携可移动机器人,包括:图像捕获模块,用于采集周围的图像;传感模块,用于获取包括与障碍物和地面之间的距离的位置信息;处理模块,耦合于所述图像捕获模块和所述传感模块,用于绘制所述便携可移动机器人所处的房间地图,进行定位、导航、和路径规划;控制模块,耦合于所述处理模块,用于发出控制信号来控制所述便携可移动机器人的运动;运动模块,用于根据所述控制信号来运动;以及辅助模块,用于提供辅助功能。
本发明的便携可移动机器人及其操作方法能够实现机器人与用户之间的互动,并为用户带来家居服务。
申请人:三个机器人公司
地址:美国加利福尼亚州
国籍:US
代理机构:北京市万慧达律师事务所
代理人:黄玉东
更多信息请下载全文后查看。
![管道内柔性移动微小机器人系统[实用新型专利]](https://uimg.taocdn.com/7d172157f121dd36a22d8219.webp)
专利名称:管道内柔性移动微小机器人系统专利类型:实用新型专利
发明人:于莲芝
申请号:CN201220193597.2
申请日:20120428
公开号:CN202629477U
公开日:
20121226
专利内容由知识产权出版社提供
摘要:一种管道内柔性移动微小机器人系统,气体柔性移动机构由前支撑单元、前驱动器、中间支撑单元、后驱动器和后支撑单元依次串联连接;三个支撑单元均为空心圆柱桶体,前支撑单元与后支撑单元各有一端端面封闭,中间支撑单元两个端面均封闭,在每个封闭的端面中心开有圆孔,整个圆柱桶体表面外覆盖密闭薄膜气囊,每个支撑单元上各连通一根气管,气管与通气回路连通;气压传递系统依次由高压泵、储压罐、球阀、流量调节阀一、流量调节阀二、调压阀与机器人气体柔性移动机构串接。
本实用新型结构简单、相对运动部件少、由于采用薄膜气囊,使得与管道或人体器官接触具有安全、柔性等特点,采用气动橡胶驱动器,可实现空间多自由度的驱动。
申请人:上海理工大学
地址:200093 上海市杨浦区军工路516号
国籍:CN
代理机构:上海东创专利代理事务所(普通合伙)
代理人:宁芝华
更多信息请下载全文后查看。
![一种微型智能机器人[发明专利]](https://uimg.taocdn.com/9ce8c587b84ae45c3a358ce2.webp)
专利名称:一种微型智能机器人专利类型:发明专利
发明人:张跃进,黄德昌,李波
申请号:CN201811381779.0申请日:20181120
公开号:CN109262584A
公开日:
20190125
专利内容由知识产权出版社提供
摘要:本发明涉及机器人技术领域,具体涉及一种微型智能机器人。
机器人的发展趋势是智能化、微型化,实现以上两点需要稳定可靠的硬件平台。
本发明提出的一种微型智能机器人对系统硬件的四个核心组件:动力系统、微控制器外围电路、红外距离传感器与惯性测量单元进行设计,这些硬件单元的设计实现为实现特定用途机器人的目标功能打下了良好的基础。
申请人:钟祥博谦信息科技有限公司
地址:431900 湖北省荆门市钟祥市经济开发区西环二路钟祥创业园D7栋211
国籍:CN
代理机构:北京细软智谷知识产权代理有限责任公司
代理人:付登云
更多信息请下载全文后查看。
![移动机器人[发明专利]](https://uimg.taocdn.com/30872ecda5e9856a571260a7.webp)
专利名称:移动机器人
专利类型:发明专利
发明人:基思·L·施莱,布鲁斯·A·施莱申请号:CN201280068086.0
申请日:20121130
公开号:CN104144845A
公开日:
20141112
专利内容由知识产权出版社提供
摘要:一种移动机器人(1)配置成在其使用方面广泛通用。
例如,移动机器人可配置成用于在各式各样的表面(2)上使用,而不管表面的取向和/或形状。
可选地或组合地,移动机器人可配置成用于在其行经的表面上有效和高效地移动。
在某些情况下,移动机器人配置有两个或多个组件单元
(10a,10b)。
在某些情况下,组件单元配置有磁体(50)和用于使得磁体取向的控制系统。
在某些情况下,一个或多个组件联接件(12a)连接组件单元。
在某些情况下,移动单元配置有麦克纳姆轮(20a-20d)。
申请人:螺旋机器人有限责任公司
地址:美国威斯康星州
国籍:US
代理机构:北京市磐华律师事务所
更多信息请下载全文后查看。
![可移动机器人[实用新型专利]](https://uimg.taocdn.com/7ef13ca0e45c3b3566ec8b8c.webp)
专利名称:可移动机器人
专利类型:实用新型专利
发明人:李华忠,梁卓,但唐仁,秦志强,叶永健,邹华健,朱谊,庄锦源
申请号:CN201720598380.2
申请日:20170525
公开号:CN206885197U
公开日:
20180116
专利内容由知识产权出版社提供
摘要:本实用新型提供了一种可移动机器人,包括控制单元、机器躯体及行走单元,所述行走单元包括至少两个机器腿、机器脚、第一关节支架、第二关节支架、摆动支架、摆动驱动机构及位移驱动机构,机器腿与第二关节支架的铰接轴平行于机器腿与第一关节支架的铰接轴,第二关节支架与机器脚的铰接轴垂直于机器腿与第一关节支架的铰接轴,摆动支架与机器脚的铰接轴平行于第二关节支架与机器腿的铰接轴。
本实用新型提供的可移动机器人能模仿企鹅的步态,整体结构简单,维修方便,机器腿、第一关节支架、第二关节支架、机器脚及摆动支架均能通过简单的杆件进行组装搭建,可以让用户自己体验组装的乐趣,还能生动的模仿企鹅的步态,增强了机器人的趣味性。
申请人:深圳信息职业技术学院
地址:518029 广东省深圳市龙岗区龙翔大道2188号
国籍:CN
代理机构:深圳中一专利商标事务所
代理人:官建红
更多信息请下载全文后查看。
![一种具有移动功能的机器人[发明专利]](https://uimg.taocdn.com/c2fc88e54a7302768e9939f6.webp)
专利名称:一种具有移动功能的机器人
专利类型:发明专利
发明人:杨海亮,李轲,郑奇凯,吴波,孙上元,杨雪飞,陈何成申请号:CN202011504825.9
申请日:20201218
公开号:CN112622519A
公开日:
20210409
专利内容由知识产权出版社提供
摘要:一种具有移动功能的机器人,所述移动装置包括若干个万向轮,在机器人本体的底面设有固定孔,所述支撑块的顶部与固定孔配合,在支撑块的侧面上设有配合孔,在固定孔的孔壁上设有限位孔,所述限位板的一端与配合孔配合,另一端与限位孔配合,在机器人本体的侧面上设有活动槽,控制杆的一端穿过活动槽后与限位板连接,活动板的顶部与机器人本体的侧面铰接,在支撑块的底面设有安装孔,在安装孔的孔壁上设有导向槽,连接轴的顶端插入安装孔后通过弹簧与安装孔的孔底连接,所述连接块与导向槽配合,连接块与连接轴的侧面连接。
本发明解决了常规机器人在经过凹凸不平的地面上时产生的震动会影响到正常工作的问题。
申请人:中国南方电网有限责任公司超高压输电公司柳州局
地址:545000 广西壮族自治区柳州市高新区海关路22号
国籍:CN
代理机构:成都弘毅天承知识产权代理有限公司
代理人:苟莉
更多信息请下载全文后查看。