平台式惯导系统
- 格式:ppt
- 大小:1.02 MB
- 文档页数:30



捷联式惯导系统与平台式惯导
惯导可分为两大类
目前,惯导可分为两大类:平台式惯导和捷联式惯导。
它们的主要区别在于,前者有实体的物理平台,陀螺和加速度计置于由陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;在捷联式惯导中,陀螺和加速度计直接固连在载体上。
惯性平台的功能由计算机完成,故有时也称作"数学平台",它的姿态数据是通过计算得到的。
惯导有固定的漂移率,这样会造成物体运动的误差,因此长射程的武器通常会采用指令、GPS 等对惯导进行定时修正,以获取持续准确的位置参数。
激光陀螺具有精度高、测量范围宽、内部没有活动部件、受力学环境影响小、寿命长等特点,它是捷联系统的理想测量器件,因而得到了广泛的应用,美国、法国、日本等国都将激光陀螺捷联系统应用于火箭上。
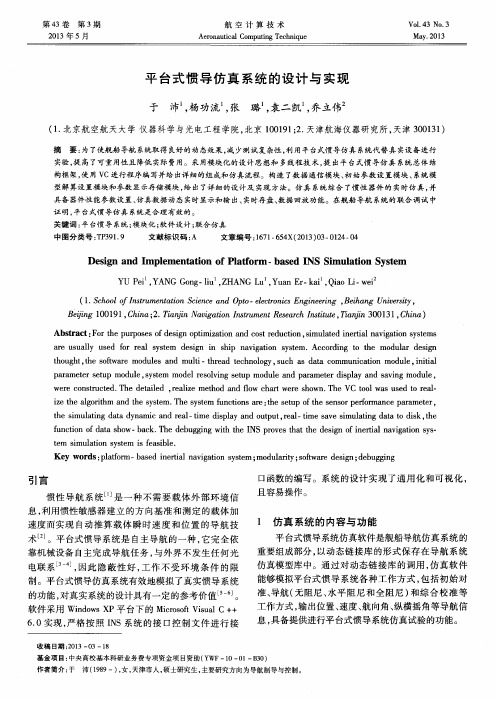
图1 激光陀螺速率捷联系统示意图
由3个激光陀螺和3个石英加速度计固连于运载火箭3个箭体轴上而成的捷联系统,如图1所示,3个激光陀螺测量沿箭体轴 x 1,y 1,z 1方向的角速度ωx1,ωy1 ,ωz1。
3个加速度
计测量沿箭体轴x 1,y 1,z 1方向的视加速度W x1, W y1,W z1。
、
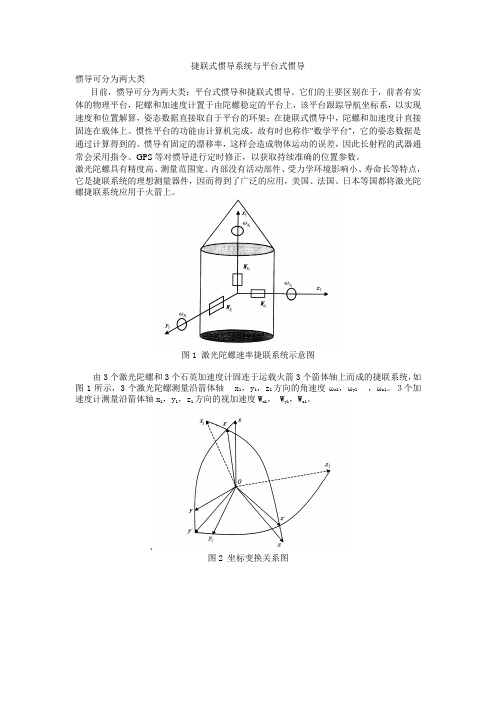
图2 坐标变换关系图。