平台式惯导系统
- 格式:ppt
- 大小:1.03 MB
- 文档页数:30

惯导系统概述惯性导航系统的概念惯性导航系统(I NS,以下简称惯导)是利用惯性元件和惯性测量原理来测量飞机的飞行参数的一种导航系统。
惯导的基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。
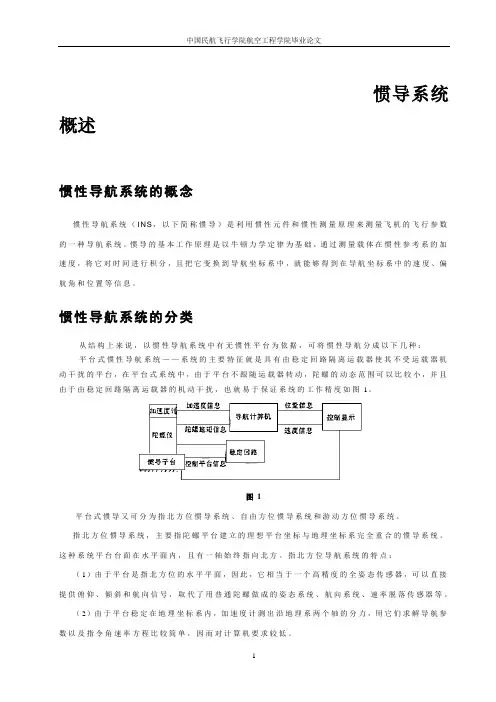
惯性导航系统的分类从结构上来说,以惯性导航系统中有无惯性平台为依据,可将惯性导航分成以下几种:平台式惯性导航系统——系统的主要特征就是具有由稳定回路隔离运载器使其不受运载器机动干扰的平台,在平台式系统中,由于平台不跟随运载器转动,陀螺的动态范围可以比较小,并且由于由稳定回路隔离运载器的机动干扰,也就易于保证系统的工作精度如图1。
图 1平台式惯导又可分为指北方位惯导系统、自由方位惯导系统和游动方位惯导系统。
指北方位惯导系统,主要指陀螺平台建立的理想平台坐标与地理坐标系完全重合的惯导系统。
这种系统平台台面在水平面内,且有一轴始终指向北方。
指北方位导航系统的特点:(1)由于平台是指北方位的水平平面,因此,它相当于一个高精度的全姿态传感器,可以直接提供俯仰、倾斜和航向信号,取代了用普通陀螺做成的姿态系统、航向系统、速率脱落传感器等。
(2)由于平台稳定在地理坐标系内,加速度计测出沿地理系两个轴的分力,用它们求解导航参数以及指令角速率方程比较简单,因而对计算机要求较低。
(3)系统的缺点是不能在高纬度区工作,这是因为飞机在高纬度地区飞行时,可能引起方位迅速变化,这样给陀螺力矩器的设计和平台稳定回路的设计带来较大的困难,另外计算机在计算方位指令速率时,当纬度接近90º时,计算机会溢出;此外,在极区进行起始对准也很困难。
上述因素限制了指北方位惯导系统的使用范围。
自由方位惯导系统,指陀螺平台保持在当地水平面内,其方位轴指向惯性空间的某一个方向,并保持稳定的惯导系统。
这样的平台系统上的方位陀螺将不施加控制信号,只能对控制平台保持在当地水平面内的陀螺施加控制指令。
捷联惯性技术的发展及与平台惯导系统的对比[2009-06-20] 作者:admin 来源:1.惯性技术与惯性导航的概述惯性技术是惯性导航技术、惯性制导技术、惯性仪表技术、惯性测量技术以及惯性测试设备和装置技术的统称。
它已有四十多年的发展历史了。
由于惯性技术的自主性等特点,它不需要引人外界信息便可实现制导于导航。
所以,它在国防科技中占有非常重要的地位,广泛的运用于航天、航空、航海等军事领域;随着惯性技术和计算机技术的不断发展以及成本降低,许多国家将其应用领域扩大到现代化交通运输、海洋开发、大地测量与勘探、石油钻井、矿井、隧道的掘进与贯通、机器人控制、现代化医疗器械、摄影技术以及森林防护、农业播种、施肥等民用领域。
惯性导航系统(Inertial Navigation System),简称惯导,是利用惯性敏感元件、基准方向及最初的位置信息来确定运载体的方位、姿态和速度的自主式航位推算系统。
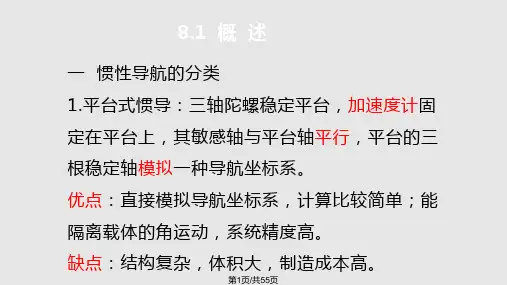
惯性导航系统可以分为平台式惯导系统和捷联式惯导系统两大类:平台式惯导系统是将陀螺仪和加速计安装在一个稳定平台上,以平台坐标系为基准,测量运载体运动参数的惯性导航系统;捷联式惯导系统(Strapdown Inertial Navigation System , SI )是将惯性敏感元件(陀螺仪和加速计)直接安装在运载体上,是一种不再需要稳定平台或常平架系统的惯性导航系统。
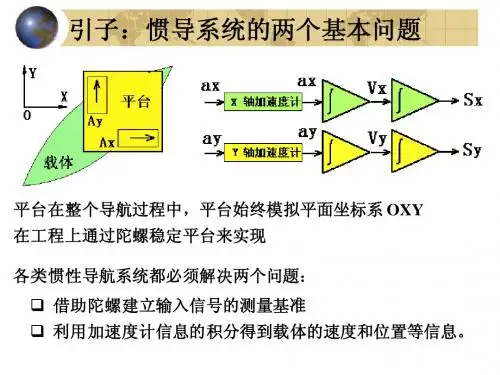
导航的目的就是为了得到运载体的实时的方位、姿态和速度。
在工程运用中,能够测定物体运动参数的方法很多:如测量位移可以用里程计,还可以用无线电定位技术、天文定位技术和卫星定位技术等;要测速度可以用测速计;要测转角可用角位置传感器(电位计、光电码盘等等);要测角速度可以用转速表、测速电机等等。
但是,以上各种测量手段还没有一种能够在同一时刻单独实时而又高精度地测量运载体的线运动和角运动,而惯性技术恰是测量这些运动参数的最理想的手段。
惯性导航系统不仅可以全面地检测到几乎所有的运动参数,而且还有一个极大的优点――是完全自主式的导航测量方法。
捷联式惯导系统与平台式惯导
惯导可分为两大类
目前,惯导可分为两大类:平台式惯导和捷联式惯导。
它们的主要区别在于,前者有实体的物理平台,陀螺和加速度计置于由陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;在捷联式惯导中,陀螺和加速度计直接固连在载体上。
惯性平台的功能由计算机完成,故有时也称作"数学平台",它的姿态数据是通过计算得到的。
惯导有固定的漂移率,这样会造成物体运动的误差,因此长射程的武器通常会采用指令、GPS 等对惯导进行定时修正,以获取持续准确的位置参数。
激光陀螺具有精度高、测量范围宽、内部没有活动部件、受力学环境影响小、寿命长等特点,它是捷联系统的理想测量器件,因而得到了广泛的应用,美国、法国、日本等国都将激光陀螺捷联系统应用于火箭上。
图1 激光陀螺速率捷联系统示意图
由3个激光陀螺和3个石英加速度计固连于运载火箭3个箭体轴上而成的捷联系统,如图1所示,3个激光陀螺测量沿箭体轴 x 1,y 1,z 1方向的角速度ωx1,ωy1 ,ωz1。
3个加速度
计测量沿箭体轴x 1,y 1,z 1方向的视加速度W x1, W y1,W z1。
、
图2 坐标变换关系图。
惯性导航系统的发展及应用绪论惯性导航是一门重要的学科技术,它是飞机、船舶、火箭等载体能顺利完成导航和控制任务的关键性技术之一。
1942年德国在V-2火箭上首次应用了惯性导航原理;1954年纯惯性导航系统在飞机上试飞成功。
30余年来,惯性导航技术获得迅速发展。
在我国惯性导航技术已在航空、航天、航海和陆地车辆的导航和定位中得到应用。
1970年以来,我过多次发射的人造地球卫星和火箭都采用了本国研制的惯性导航系统。
不仅如此,70多年以来,这门科学技术还在大地测量、海洋勘测、石油钻井、航空测量和摄影等国民经济领域里获得成功应用。
惯性导航简介惯性导航(Inertial Navigation)是20 世纪中期发展起来的完自主式的导航技术。
通过惯性测量组件(IMU)测量载体相对惯性空间的角速率和加速度信息,利用牛顿运动定律自动推算载体的瞬时速度和位置信息,具有不依赖外界信息、不向外界辐射能量、不受干扰、隐蔽性好的特点,且惯导系统能连续地提供载体的全部导航、制导参数(位置、线速度、角速度、姿态角)。
惯性导航技术,包括平台式惯导系统和捷联惯导系统。
平台式惯性导航系统将陀螺通过平台稳定回路控制平台跟踪导航坐标系在惯性空间的角速度。
捷联惯性导航系统利用相对导航坐标系角速度计算姿态矩阵,把雷体坐标系轴向加速度信息转换到导航坐标系轴向并进行导航计算。
惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。
惯性测量装置包括加速度计和陀螺仪,又称惯性导航组合。
3个自由度陀螺仪用来测量飞行器的三个转动运动;3个加速度计用来测量飞行器的3个平移运动的加速度。
计算机根据测得的加速度信号计算出飞行器的速度和位置数据。
控制显示器显示各种导航参数。
陀螺仪陀螺仪是惯性系统的主要元件。
陀螺仪通常是指安装在万向支架中高速旋转的转子,转子同时可绕垂直于自转轴的一根轴或两根轴进动,前者称单自由度陀螺仪,后者称二自由度陀螺仪。
陀螺仪具有定轴性和进动性,利用这些特性制成了敏感角速度的速率陀螺和敏感角偏差的位置陀螺。