板球系统的模糊控制方法研究
- 格式:pdf
- 大小:181.26 KB
- 文档页数:3
模糊逻辑跟踪控制
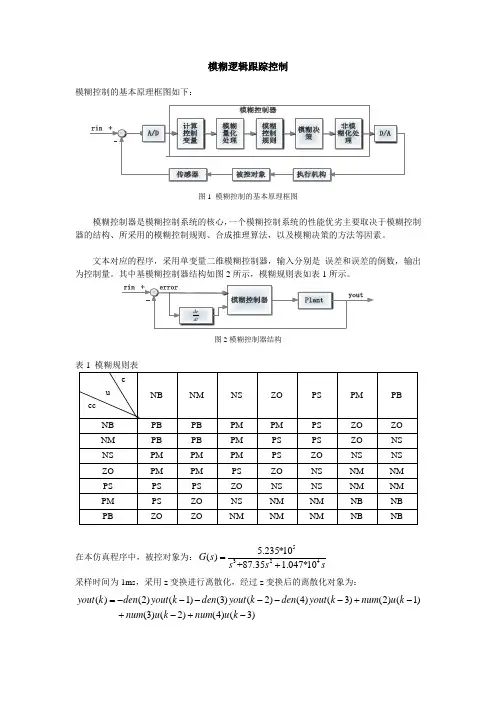
模糊控制的基本原理框图如下:
图1 模糊控制的基本原理框图
模糊控制器是模糊控制系统的核心,一个模糊控制系统的性能优劣主要取决于模糊控制器的结构、所采用的模糊控制规则、合成推理算法,以及模糊决策的方法等因素。
文本对应的程序,采用单变量二维模糊控制器,输入分别是 误差和误差的倒数,输出为控制量。
其中基模糊控制器结构如图2所示,模糊规则表如表1所示。
de dt
图2模糊控制器结构
表1 模糊规则表
在本仿真程序中,被控对象为:5
3245.235*10()+87.35 1.047*10G s s s s
=+
采样时间为1ms ,采用z 变换进行离散化,经过z 变换后的离散化对象为:
()(2)(1)(3)(2)(4)(3)(2)(1) (3)(2)(4)(3)
yout k den yout k den yout k den yout k num u k num u k num u k =------+-+-+-
其中,反模糊化采用“Centroid”方法,方波响应及控制器输出结果如图3和图4所示:。
基于模糊PID控制的球磨机自动控制系统设计摘要:提出了一种模糊控制对球磨机进行自动控制的技术方案,将模糊PID 控制理论引入到球磨机控制系统中,能够很好地克服球磨机非线性、时变等因素的干扰影响,能有效地避免球磨机发生胀磨或是空磨现象。
系统运行可靠,抗干扰能力强,能较好地实现球磨机恒功率自动控制,提高了设备的生产率和自动化水平,具有较好的推广应用价值。
关键词:模糊PID控制;球磨机;自动控制系统;设计1前言球磨机是物料被破碎之后,再进行粉碎的关键设备,具有结构简单、单体容量大、破碎比高、产量大、连续运行稳定等优点,成为目前磨矿的一种主要设备。
在研磨过程中,需要对球磨机中的给矿、给水、给球进行严格控制,这些参数对产品质量有很大影响。
由于系统存在较大的惯性和滞后性,而且受外部供料条件的限制,当进入球磨机的性质发生变化时,造成球磨机的负荷波动很大,表现为运行电流大幅度摆动,且仅凭经验来判别球磨机运行是处于胀磨或是空磨状态,容易造成球磨机的损害,影响电动机及传动机械的正常运行,产品质量也得不到保证,因此对它的控制十分必要,实现其自动控制具有广阔的应用前景。
2系统设计2.1功能要求控制系统的主要控制目标是完成球磨机工作负荷稳定,也就是将控制驱动电机的功率稳定。
影响驱动电机功率稳定的主要因素是球磨机的给料量和出料量。
出料量一般为设定值,浮动范围不大,系统主要是利用控制球磨机的给矿量来控制电机在恒功率状态。
针对球磨机复杂的工况,常规的PID控制效果不佳,系统选用模糊PID 控制。
控制系统还将采集球磨机研磨时的声响、主轴的振动、主轴电机功率、润滑油温度及压力等参数及各开关与电机运行状态,在现场及上位机监控界面上显示,并运用声响、振动、功率3 个主要参数反映球磨机的负荷,更好地实现整个球磨机的优化控制。
2.2模糊控制系统结构球磨机模糊控制系统结构如图1 所示。
主驱动电动机功率通过功率变送器检测,检测到的功率信号转换成电信号送模糊控制器,模糊控制器由德国西门子公司生产的S7-300 型PLC 编程实现,采用二输入三输出的形式,模糊控制器将检测的功率值与设定的功率进行比较,根据其误差值e 及误差变化率ec作为模糊控制器的输入量,输出控制量KP、TI、TD作为PID 控制参数的输入量,根据被控过程对参数KP、TI、TD的自整定要求实现参数KP、TI、TD整定,以满足不同时刻电机功率偏差e 和偏差变化率ec对参数自动调整的要求,这样在实际控制中具有良好的动态性能,PID 的3 个参数能依据当前系统的状况来做出相应的调整。
机电工程学院课程设计报告课程题目二阶系统模糊控制算法的研究专业电气工程及其自动化姓名指导教师学期2015-2016二阶系统的模糊控制算法的研究学生指导老师:摘要:模糊控制是以模糊数学为基础发展的,为一些无法建立数学模型或者数学模型相当粗糙的系统提供的一种非线性的控制方法。
对于这些系统,模糊控制可以得到比较满意的控制效果,并且能够解决一些无法通过传统方法解决的问题。
本文利用MATLAB模糊控制工具箱设计的模糊控制器来控制一个二阶系统,由给定的控制器的输入和输出变量,输入和输出变量的隶属函数,分析了输入和输出变量之间的关系,设计了模糊控制规则库,并通过SIMULINK仿真将模糊控制方法与经典的PID控制方法进行对比,分析仿真结果,探讨模糊控制器的隶属函数,控制规则,以及量化因子和比例因子在模糊控制中所起到的作用。
关键字:模糊控制;MATLAB;SIMULINK;PIDResearch of fuzzy control algorithm of second ordersystemsUndergraduate:Supervisor:Abstract:Fuzzy control, which is based on the fuzzy mathematics, is a new way of nonlinearity control system in which the mathematical model is unable established or the mathematical model is very rough. For these systems, fuzzy control offers users a satisfied control result, and settles down some problems which cannot be solved by traditional methods.This paper aims to introduce how to use a fuzzy controller which is based on the MATLAB fuzzy control toolbox to control a second-order system. In order to fulfill this target, the author firstly defines the input variables, output variables and their membership functions. Then, the author analyzes the relationship between the input variables and output variables, and designs the fuzzy control rule bank. Finally, the author makes a difference between the methods of the classic PID control and the fuzzy control by SIMULINK. Membership function of fuzzy controller, control rules, and the function of quantizes and scale factor in the fuzzy control process are also discussed in this paper.Key words: MATLAB; Fuzzy control; PID;SIMULINK simulation目录绪论 (1)1控制理论算法 (5)3.1 PID控制规律 (5)3.1PID控制器原理 (5)3.1 (5)3.1.3微分(D)控制 (5)3.2传统PID控制过程 (5)1模糊控制 (1)1.1模糊控制的背景及意义 (1)1.2模糊控制的基本理论 (1)1.3模糊控制的基本结构 (1)1.4模糊控制的组成 (1)1.5模糊控制的运行模型 (1)1.6模糊控制与SIMULINK的 (1)2基于MATLAB的模糊控制仿真 (2)2.1模糊控制器的设计 (2)2.1模糊集合及论域的定义 (2)2.2模糊控制规则确定 (4)2.3仿真曲线 (5)4比较 (7)参考文献 (8)致 (9)绪论模糊控制器由三个环节组成:用于输入信号处理的模糊量化和模糊化环节,模糊控制算法功能单元,以及用于输出解模糊化的模糊判决环节。
第20卷第4期2020年12月Vol.20No.4Dec.2020应用技术学报JOURNAL OF TECHNOLOGY文章编号:2096-3424(2020)04-0343-07DOI:10.3969/j.issn.2096-3424.2020.04.007板球系统平台设计方案研究陈芷琳,温晓静,刘鑫,王翔,丁肇红(上海应用技术大学电气与电子工程学院,上海201418)摘要:板球系统是一个非常经典的自动控制原理实验平台,其本身也是一个集合机械、电子、自动化以及计算机科学等各个学科的综合系统。
设计了搭建一整套完整的板球系统平台的方案,包括机械结构设计,硬件电路设计,嵌入式软件设计以及上位机设计,最后通过做出的实物平台验证了方案的可行性。
实验结果表明,该板球系统平台设计方案有较高的实用价值,制造成本低,同时该研究所设计的方案也为其他自动控制实验仪器设计提供了解决思路和方案,有较高的应用和推广价值。
关键词:板球系统;硬件设计;软件设计;系统集成中图分类号:TP23文献标志码:AResearch on Design Scheme of Ball and Plate SystemCHEN Zhilin,WEN Xiaojing,LIU Xin,WANG Xiang,DING Zhaohong(School of Electrical and Electronic Engineering,Shanghai Institute ofTechnology,Shanghai201418,China)Abstract:The ball and plate system is a very classic experimental platform for automatic control principles. It is also a comprehensive system that integrates various disciplines such as machinery,electronics, automation and computer science.This paper has proposed a solution to build a complete set of ball and plate system platforms,including mechanical structure design,hardware circuit design,embedded software design and host computer design,finally,the feasibility of the program was verified by the physical platform made・The experimental results show that the design scheme of the ball and plate system platform has high practical value and low manufacturing cost.At the same time,this scheme also provides solutions and solutions for the design of other automatic control experimental instruments.Key words:ball and plate;hardware design;software design;system integration自从20世纪80年代末板球系统开始被国内外学者当作研究对象来验证各种控制算法,板球系统的研究已经经历了从simulink模型仿真验证到实物平台实时控制的过渡卩幻,陆续有各个课题组实验室以及企业生产制造出各类板球系统实物平台,其中国内比较常用的是由固高科技公司生产的GPB2001板球系统,其平台实物和上位机界面如图1所示。
基于模糊控制的帆板方向调整与稳定性优化帆板方向调整与稳定性优化是帆船或风力发电机等帆板装置中关键的技术问题。
利用模糊控制算法实现帆板方向调整和稳定性优化,能有效提高帆板系统的性能和稳定性。
本文将从帆板方向调整和稳定性的优化两个方面进行探讨。
一、帆板方向调整帆板方向调整是帆板系统中的一个关键问题。
通过合理调整帆板的方向,使得帆板能够根据风向进行最佳转向,以实现船体的前进或风力发电装置的最佳发电效果。
模糊控制算法是一种能够适应复杂环境和具有自适应性的控制算法,可以很好地应用于帆板方向调整中。
首先,利用模糊控制算法需要建立系统的数学模型。
该模型包括帆板的力学特性、风向传感器的测量误差以及系统的非线性等因素。
通过数学模型,可以将帆板系统的动态特性转化为模糊控制算法可处理的离散问题,为算法的设计提供基础。
其次,设计模糊控制器的输入和输出变量。
输入变量可以选择风速、风向以及帆板当前角度等,输出变量则是帆板的转向角度。
通过对输入变量进行隶属度函数的设计和规则库的建立,可以根据当前的输入状态得出合适的输出转向角度,从而实现帆板的方向调整。
最后,进行模糊控制算法的仿真和优化。
通过利用仿真软件,将设计好的模糊控制算法嵌入系统,并进行各种工况下的仿真实验。
根据仿真结果,可以进一步优化模糊控制算法的参数和规则库,从而提高系统的响应速度和稳定性。
二、稳定性优化在帆板系统中,稳定性是一个非常重要的问题。
良好的稳定性能够保证帆板在变化的环境条件下保持良好的工作状态,提高系统的可靠性和安全性。
利用模糊控制算法可以优化帆板系统的稳定性。
首先,分析系统的稳定性问题。
帆板系统可能存在的稳定性问题包括悬挂问题、不稳定摆动等。
通过对系统的分析,可以确定影响系统稳定性的因素,并建立相应的数学模型。
其次,设计基于模糊控制的稳定性优化算法。
根据系统的特点和稳定性需求,可以设计合适的控制策略和优化目标。
利用模糊控制算法,可以将非线性和模糊的系统特性进行处理,得到合适的控制输出,从而优化系统的稳定性。
基于模糊控制的帆板定向追踪系统设计与优化帆板定向追踪系统是一种利用传感器采集光照信息,通过控制机构旋转帆板,以实现对太阳光定向追踪的装置。
而基于模糊控制算法的帆板定向追踪系统设计和优化,致力于通过改进算法和参数优化,提高系统的定向追踪精度、稳定性和效率。
在设计和优化帆板定向追踪系统时,首先需要确定系统的硬件组成和传感器的选择。
帆板定向追踪系统一般由帆板、旋转机构、光照传感器和控制器组成。
光照传感器可以选择光敏电阻、光电二极管等,具体选择要根据系统的工作环境和精度要求进行权衡。
旋转机构可以采用伺服电机等,以实现帆板的精确旋转。
在设计模糊控制算法时,首先需要根据系统的输入和输出定义模糊集合及其隶属度函数。
对于帆板定向追踪系统,输入可以是光照传感器采集的光照强度,而输出可以是旋转机构的旋转角度。
接着,需要确定模糊规则库,以将输入与输出进行关联。
模糊规则库的设计需要结合专家知识和实际测试数据,通过试错法进行不断调整和优化。
在优化帆板定向追踪系统时,可以采取以下几种方法。
首先,可以通过对光照传感器的准确度进行校准,以提高系统的测量精度。
其次,可以通过模糊控制算法参数的优化,如隶属度函数的选择和模糊规则的更新,以提高系统的控制精度和响应速度。
此外,还可以通过加入反馈控制环节,如PID控制器等,以进一步提高系统的稳定性。
在实际应用中,帆板定向追踪系统可以广泛应用于太阳能光伏发电、太阳能热水器等领域,以提高能源利用效率。
在太阳能光伏发电中,帆板定向追踪系统可以根据太阳光的方向,使光伏电池板始终保持正对太阳,最大限度地接收太阳辐射,从而提高光伏发电效率。
而在太阳能热水器中,帆板定向追踪系统可以根据太阳光的方向,使热水管道始终保持正对太阳,加快水的加热速度,提高热水器的效率。
总之,基于模糊控制的帆板定向追踪系统设计和优化是一项关键的技术研究和工程应用领域。
通过合理的硬件配置,精准的模糊控制算法设计和优化,可以提高帆板定向追踪系统的定向追踪精度、稳定性和效率,为太阳能利用提供可持续发展的技术支持。
控制系统的模糊滑模控制方法控制系统是现代科技发展中一个重要的领域,模糊滑模控制方法是一种应用广泛的控制技术。
本文将对控制系统的模糊滑模控制方法进行详细介绍。
一、概述模糊滑模控制是指通过模糊推理和滑模控制相结合的方式来实现对系统的控制。
它综合了模糊控制和滑模控制的优势,具有较好的鲁棒性和自适应性,能够适应系统参数的变化和外部干扰的影响。
二、模糊控制的基本原理模糊控制是一种基于模糊推理的控制方法,它将模糊集合和模糊规则应用于控制系统中,以模糊集合表示系统的输入和输出,通过模糊推理处理输入与输出之间的关系。
三、滑模控制的基本原理滑模控制是一种基于变结构控制的方法,它通过引入滑模面来控制系统的行为。
滑模面是系统状态与控制量之间的约束面,当状态变化超出滑模面时,控制器会对系统施加较强的控制力使其回到滑模面上。
四、模糊滑模控制的基本原理模糊滑模控制的基本原理是将模糊控制和滑模控制相结合,利用模糊推理来设计滑模面以及滑模控制器。
通过模糊推理可以处理不确定性和模糊性,提高系统的鲁棒性和自适应性,滑模控制则可以使系统在滑模面上运行,具有较好的跟踪性能和抗干扰能力。
五、模糊滑模控制方法的优势1.对系统的模糊和非线性特性具有较好的适应性,可以有效提高系统的控制性能;2.具有较强的鲁棒性,能够适应系统参数的变化以及外部干扰的影响;3.能够通过模糊推理处理系统的模糊性和不确定性,提高控制的精度和稳定性。
六、模糊滑模控制方法的应用领域模糊滑模控制方法在许多领域中都得到了广泛应用,如机器人、飞行器、电力系统、交通控制等。
它能够有效地处理系统的非线性特性和不确定性,提高系统的控制性能和稳定性。
七、总结模糊滑模控制方法是一种应用广泛的控制技术,它综合了模糊控制和滑模控制的优势,具有较好的鲁棒性和自适应性。
在实际应用中,我们可以根据系统的具体情况选择合适的方法来设计控制器,以实现对系统的良好控制。
通过本文对控制系统的模糊滑模控制方法的介绍,希望读者能够了解该方法的基本原理、优势以及应用领域,并能够在实际工程中灵活运用,取得良好的控制效果。
基于模糊控制的帆板姿态控制系统设计与优化帆板姿态控制是指通过操纵帆板的姿态来实现对帆船的运动控制。
基于模糊控制的帆板姿态控制系统设计与优化是为了提高帆船的操纵性能而进行的研究。
帆板姿态控制系统是由传感器、执行机构、控制器和算法等组成的。
其主要功能是通过获取帆板当前姿态信息,通过控制器计算出控制命令,最后由执行机构将控制命令转化为帆板姿态调整。
基于模糊控制的帆板姿态控制系统,相比于传统的控制策略,可以更好地处理帆船运动过程中的不确定性和模糊性,提高控制效果。
在设计和优化基于模糊控制的帆板姿态控制系统时,首先需要进行系统建模。
帆板的姿态可以通过倾角和航向角来描述,因此需要选择合适的传感器来获取这些信息。
同时,还需要考虑风速和船舶速度等外部环境因素对帆板姿态的影响。
接下来,在模糊控制器的设计中,需要确定模糊规则库和模糊推理方法。
模糊规则库是用来描述系统输入和输出之间的关系,根据帆板姿态和控制指令之间的对应关系来构建模糊规则库。
模糊推理方法则是根据当前输入条件和规则库,计算出系统的输出控制指令。
在优化基于模糊控制的帆板姿态控制系统时,可以采用模拟和仿真的方法进行性能评估。
通过调整模糊规则库中的参数和模糊推理方法,可以优化系统的响应速度和控制稳定性。
此外,还可以使用优化算法对模糊控制器的参数进行自动调整,以进一步提高系统性能。
基于模糊控制的帆板姿态控制系统设计与优化还可以考虑使用其他控制策略进行多控制器融合,以满足不同风速、航向和船速等条件下的控制要求。
例如,可以结合PID控制和模糊控制,使系统具有更好的鲁棒性和适应性。
最后,为了实现设计的帆板姿态控制系统,还需要进行硬件设计和软件编程。
合理选择传感器、执行机构和控制器的型号和参数,并进行相应的电路设计和编程实现。
综上所述,基于模糊控制的帆板姿态控制系统设计与优化是为了提高帆船操纵性能而进行的研究。
通过系统建模、模糊控制器设计和优化,可以实现对帆板姿态的精确控制。
基于串级PID和复合滤波算法板球控制系统设计【摘要】本文主要介绍了基于串级PID和复合滤波算法的板球控制系统设计。
在讨论了研究背景和研究意义,说明了该系统的重要性。
接着详细介绍了串级PID控制算法和复合滤波算法的原理和应用。
然后给出了基于这两种算法设计的板球控制系统的具体实现方法,并展示了实验结果和性能分析。
在总结了整篇文章的研究内容,并展望了未来可能的发展方向。
通过本文的研究可以得知,基于串级PID和复合滤波算法的板球控制系统设计有着很大的潜力,并有望在未来的实际应用中发挥重要作用。
【关键词】板球控制系统、串级PID、复合滤波算法、实验结果、性能分析、研究背景、研究意义、总结、展望1. 引言1.1 研究背景本文旨在通过结合串级PID控制算法和复合滤波算法,设计一种更加高效稳定的板球控制系统。
通过实验验证系统设计的效果,并对其性能进行分析,以期为工业自动化领域的控制系统设计和优化提供参考和借鉴。
1.2 研究意义板球运动是一项受到广泛关注的运动项目,而板球控制系统的设计和优化对于提高比赛表现和训练效果具有重要意义。
本文旨在研究基于串级PID和复合滤波算法的板球控制系统设计,通过对板球运动过程中的精准控制和运动轨迹的优化,提高板球运动的稳定性和准确性。
该研究具有重要的实际意义,可以为板球运动员提供更有效的训练方案,促进比赛表现的提升。
该研究对于板球控制系统的发展和创新具有一定的参考意义,可以为未来相关领域的研究提供借鉴和启发。
通过本文的研究,将有助于推动板球运动技术的进步和全面提升,促进板球运动在更广泛的范围内得到普及和发展。
本研究具有重要的理论意义和实践价值。
2. 正文2.1 串级PID控制算法串级PID控制算法是一种常用的控制策略,通过将多个PID控制器串联起来,可以有效地提高系统的稳定性和响应速度。
在板球控制系统中,串级PID控制算法可以用来控制板球的位置和速度,从而实现精准的运动控制。
在串级PID控制算法中,位置控制器和速度控制器之间通常采用前馈环节进行耦合,以进一步提高系统的响应速度和稳定性。
《伺服电机驱动的连铸结晶器振动位移系统模糊控制研究》篇一一、引言随着现代工业技术的飞速发展,伺服电机驱动技术已经广泛应用于各个领域,尤其在连铸生产线上,其高效、稳定和精确的特性被广大工程师所认可。
在连铸结晶器振动位移系统中,由于结晶器内部的液态金属在冷却凝固过程中需要不断进行振动,以达到良好的结晶效果,因此,对伺服电机驱动的连铸结晶器振动位移系统的控制技术提出了更高的要求。
本文旨在研究模糊控制算法在伺服电机驱动的连铸结晶器振动位移系统中的应用,以提升系统的控制精度和稳定性。
二、连铸结晶器振动位移系统概述连铸结晶器振动位移系统是连铸生产线上的重要组成部分,其主要功能是使结晶器在凝固过程中进行周期性的振动。
这种振动有助于液态金属的均匀冷却和结晶,从而提高铸坯的质量。
该系统通常由伺服电机、传动装置、振动机构等部分组成。
其中,伺服电机的精确控制是实现振动位移系统稳定运行的关键。
三、传统控制方法及其局限性传统的连铸结晶器振动位移系统主要采用PID控制算法。
然而,在实际应用中,由于系统受到多种因素的影响,如负载变化、环境温度变化等,导致PID控制算法难以达到理想的控制效果。
此外,连铸过程中的振动特性具有非线性和时变性的特点,使得传统控制方法难以满足高精度的要求。
因此,需要寻求一种更为先进的控制方法来提高系统的性能。
四、模糊控制算法的原理及优势模糊控制算法是一种基于模糊数学的控制方法,其基本原理是将人的经验知识进行模糊化处理,然后通过模糊推理对系统进行控制。
与传统的控制方法相比,模糊控制算法具有以下优势:1. 无需建立精确的数学模型:模糊控制算法可以根据经验知识进行控制,无需建立系统的精确数学模型。
2. 适应性强:模糊控制算法可以处理非线性和时变性的系统,具有较强的适应性。
3. 鲁棒性好:模糊控制算法对系统参数的变化具有较好的鲁棒性,能够保持较好的控制性能。
五、模糊控制在连铸结晶器振动位移系统中的应用将模糊控制算法应用于连铸结晶器振动位移系统中,可以实现对伺服电机的精确控制。
控制系统的模糊理论与应用控制系统是现代科学技术中的一项重要内容,它能够对各种系统进行运动控制和过程控制。
在控制系统的设计和应用过程中,模糊理论被广泛应用。
模糊理论是一种有效的数学方法,能够处理复杂的、不确定的信息,使得控制系统能够更好地适应变化的环境和需求。
一、模糊理论的基本原理模糊理论是由扬·琴格和埃尔·卡尔曼等人提出的,它是对传统逻辑和控制理论进行改进和发展的一种数学理论。
模糊理论引入了模糊集合、隶属度和模糊推理等概念。
其中,模糊集合是指一个元素可以隶属于某个集合的程度不是二元逻辑的真或假,而是一个连续的值。
隶属度是描述一个元素对某个模糊集合的隶属程度,它可以是一个介于0和1之间的实数。
模糊推理则是基于模糊集合和隶属度进行推理和判断。
二、模糊理论在控制系统中的应用1. 模糊控制模糊控制是控制系统中最常见的模糊理论应用之一。
传统的控制系统需要准确的数学模型和精确的参数,而模糊控制则可以处理模糊和不确定的信息,使得控制系统能够更好地适应各种情况。
模糊控制通过将输入和输出映射为模糊集合,然后使用模糊规则进行推理和判断,最后将模糊输出转换为实际控制信号,从而实现对系统的控制。
2. 模糊识别模糊识别是另一个重要的模糊理论应用。
在传统的识别方法中,需要确切的模型和特征提取方法,而模糊识别则可以对复杂和模糊的信息进行识别。
模糊识别通过建立模糊关系模型和特征隶属度函数,将输入的模糊信息转化为输出的识别结果,从而实现对系统的识别和分类。
3. 模糊优化模糊优化是指将模糊理论应用于优化问题中。
在传统的优化方法中,需要准确的目标函数和约束条件,而模糊优化可以处理不确定和模糊的约束条件。
模糊优化通过建立模糊目标函数和约束条件,利用模糊推理和模糊集合运算,求解出模糊最优解,从而实现对系统的优化和改进。
三、模糊理论在实际应用中的案例1. 温度控制系统在温度控制系统中,温度传感器采集到的温度信息是模糊的,模糊控制器根据模糊规则对温度进行判断,并输出控制信号,使得系统维持在设定的温度范围内。
模糊PID控制算法模糊控制是一种基于模糊逻辑的控制策略,可以在一定程度上解决传统PID控制在复杂、非线性系统中的不足。
模糊PID控制算法是将传统PID控制与模糊控制相结合的一种控制方法。
模糊控制通过模糊集合、模糊规则和模糊推理等概念来进行控制决策,将模糊集合表示为隶属度函数的形式。
在模糊PID控制中,输入信号和输出信号被表示为模糊集合,以反映系统的模糊特性。
1.设计模糊控制器的输入和输出变量,以及它们的模糊集合。
输入变量常根据控制系统的误差、误差变化率和积分误差来选取,输出变量为控制器输出。
2.设计模糊规则库。
根据经验和专家知识,建立模糊规则库,其中规则的形式是:“如果...,那么...”。
规则库中的模糊规则由若干模糊规则组成,每条规则都包含一个模糊逻辑表达式。
3.构建模糊推理机制。
模糊推理是模糊控制的核心,它是根据输入信号的隶属度函数和模糊规则库来获得输出信号的过程。
常见的模糊推理方法有最大隶属度法、最小隶属度法和平均隶属度法。
4.确定模糊控制器的输出。
通过模糊推理机制计算出的输出隶属度函数,用去模糊化方法将其转化为实际的控制量。
5.将模糊控制器输出与系统输出进行比较,计算误差,并利用PID控制算法进行调整产生新的控制量。
1.能够处理非线性系统。
由于模糊控制具有非精确性和模糊性,可以更好地适应非线性系统的特性。
2.具有适应性。
模糊PID控制算法具有自适应调节的能力,可以针对不同的系统和工况进行自动调整。
3.具有鲁棒性。
模糊控制通过引入模糊集合和模糊规则来处理噪声和干扰,提高了控制系统的鲁棒性。
4.高效性能。
模糊PID控制算法结合了PID控制的优点,能够在快速响应和稳定控制之间找到一个平衡。
然而,模糊PID控制算法也存在一些不足之处:1.设计复杂度高。
模糊PID控制需要设计模糊集合、模糊规则库和模糊推理机制,设计过程较为复杂,需要专业的知识和经验。
2.性能依赖于模糊规则。
模糊控制的性能很大程度上依赖于模糊规则的设计和选择,不合理的规则设计可能导致控制性能下降。
PID及模糊控制算法PID控制算法是一种传统的控制算法,它通过对系统的误差进行测量并相应地调整控制器的输出来实现系统稳定和精确控制。
PID算法是基于系统的反馈控制原理设计的,并广泛应用于各种工业系统中。
PID控制算法由三个参数组成:比例项(P),积分项(I)和微分项(D)。
比例项根据当前误差的大小进行控制输出,积分项根据历史误差的累积进行控制输出,微分项根据误差变化的速率进行控制输出。
这三个项的组合使用可以使系统具有快速响应、稳定性和抗干扰能力。
比例项的作用是根据当前误差对控制器的输出进行调整。
当误差较大时,比例项可以使控制器更快地对系统进行调整,以减小误差。
然而,如果比例项过大,就可能导致系统产生振荡甚至不稳定。
积分项的作用是根据历史误差的累积对控制器的输出进行调整。
当系统存在静态误差时,积分项可以通过积累误差来逐渐减小静态误差。
然而,积分项过大可能导致系统产生超调或过冲现象。
微分项的作用是根据误差变化的速率对控制器的输出进行调整。
微分项可以通过反馈误差的变化率来提前调整控制器的输出,以减小误差的变化速率。
然而,由于微分项对高频噪声敏感,过大的微分项可能导致系统产生振荡。
模糊控制算法是一种基于模糊逻辑的控制算法,它能够处理非线性和模糊性问题。
模糊控制算法通过将输入和输出的模糊集合和一组模糊规则进行匹配,来确定控制器的输出。
模糊控制算法适用于无法准确建立系统数学模型或系统模型非常复杂的情况下。
模糊控制算法主要由三个部分组成:模糊化、推理和解模糊化。
模糊化将输入和输出的实际值通过模糊化函数转换为模糊集合,推理根据一组模糊规则来确定控制器的输出模糊集合,解模糊化将输出模糊集合通过解模糊化函数转换为实际值作为控制器的输出。
模糊控制算法中的模糊集合和模糊规则的设计通常需要经验和专业知识。
模糊集合的划分和隶属函数的选择会对控制器的性能产生重要影响。
模糊控制算法的设计也需要进行系统的调试和优化,以获得最佳的控制效果。
基于串级PID和复合滤波算法板球控制系统设计
在板球控制系统中,PID控制算法是一种常用的控制算法。
传统的串级PID控制算法存在一些问题,如参数调节困难、控制效果不稳定等。
为了解决这些问题,另一种复合滤波算法也被引入到板球控制系统中。
串级PID控制算法是一种将多个PID控制器串联而成的控制算法。
它将控制对象的输入与输出之间的误差信号经过PID控制器进行控制,并将PID控制器的输出作为输入传递给下一个PID控制器。
这种算法可以通过调节不同PID控制器的参数来达到控制对象的稳定控制。
串级PID控制算法在实际应用中存在一些问题。
PID控制器的参数难以调节。
由于控制对象可能是非线性的,不同的PID参数对不同的操作点可能有不同的效果,因此需要经过大量实验来调节PID参数,这显然不是一个高效的方法。
串级PID控制算法在控制效果上可能存在一定的不稳定性。
当控制对象发生突变或扰动时,串级PID控制算法可能会有滞后和响应不足的问题。
为了解决串级PID控制算法的问题,复合滤波算法被引入到板球控制系统中。
复合滤波算法是一种将多个滤波器结合起来使用的控制算法。
它通过使用不同的滤波器对控制对象的输入信号和误差信号进行滤波,以提高系统的稳定性和抗干扰能力。
复合滤波算法可以同时对不同频率的信号进行滤波,从而减小系统的响应时间,提高系统的控制能力。
基于视觉的板球控制系统研究赵艳花;邵鸿翔【期刊名称】《自动化技术与应用》【年(卷),期】2011(030)010【摘要】Ball and plate system is a typical multi-variable nonlinear object. To the problem of position and trace control, a scheme based vision is proposed in this paper. The real system result of position and trace control shows that this scheme has better performance, its error less than 1mm.%板球系统是一个典型的多变量、非线性控制对象,本文针对该系统的基本位置控制和轨迹控制问题,采用基于视觉的控制方案,并在实物板球控制系统做了实时控制,达到了误差1mm以内的控制效果.【总页数】4页(P12-15)【作者】赵艳花;邵鸿翔【作者单位】洛阳理工学院电气工程与自动化系,河南洛阳471023;洛阳理工学院电气工程与自动化系,河南洛阳471023【正文语种】中文【中图分类】TP2【相关文献】1.基于视觉反馈的板球系统定位控制 [J], 武凡凯;付伟;张釜荣;谢慕君2.基于机器视觉的板球控制系统设计与实现 [J], 焦新杭;付建;陈佳磊;张轶蔚3.基于滑模控制技术的视觉板球控制系统设计 [J], 韩治国; 李伟; 冯兴; 陈能祥4.基于机器视觉的板球控制系统设计与实现 [J], 焦新杭; 付建; 陈佳磊; 张轶蔚5.基于双环PID算法与大津法的板球视觉控制系统 [J], 徐涢基;龚明;龚诚;王莉因版权原因,仅展示原文概要,查看原文内容请购买。
第23卷第9期 计算机仿真 2006年9月 文章编号:1006—9348(2006)09—0165—03
板球系统的模糊控制方法研究
苏信,孙政顺,赵世敏 (清华大学自动化系,北京100084) 摘要:板球系统是一个典型的多变量、非线性控制系统,是杆球系统的扩展,用以检测各种控制方案。该文针对板球系统的 定点稳定问题,首先提出了T—s模糊控制方案,仿真结果较好,但实物系统的试验却发现球在稳定点附件振荡、难以稳定、 超调大;针对此缺点,在T—s模糊控制方案的基础上,提出变论域自适应模糊控制方案,仿真结果表明控制性能得到明显改 善,且越是靠近稳定点效果越明显,体现了变论域自适应模糊控制方法具有精度高、无振荡、几乎无超调的特点。实物系统 的试验结果也表明,变论域自适应模糊控制方案比T—s模糊控制方案的效果要好。 关键词:板球系统;变论域;模糊控制;自适应控制 中图分类号:TP391.9 文献标识码:A
Fuzzy Control Method for Ball and Plate System SU Xin,SUN Zheng—shun.ZHAO Shi—rain (Automation Department,Tsinghua University,Beijing 100084,China) ABSTRACT:Ball and plate system is a typical multi—variable plant,which is the extension of the traditional ball and be'am problemsIt is put forward to inspect diverse control schemes。T—S fuzzy control scheme is introduced
firstly for the stabilization problem at the designed point for the ball and plate system.The simulation result is fine, but the experiment result of the real system shows that the disadvantages are evident,such as oscillation,overshoo— ting。To solve the above mentioned problems,adaptive fuzzy control scheme based on variable universe is introduced ground on T—S fuzzy control scheme.The simulaffon result shows that the performance is improved,especially near the stabilizaion point,which embodys the nice characters of the adaptive fuzzy control scheme based on variable uni— verse,such as high accuracy,no oscillation and no overshoot。 KEYWORDS:Ball and plate system;Variable universe;Fuzzy control;Adaptive control
1 引言 板球系统是一个典型的多变量、非线性控制系统,是杆 球系统 。 的扩展。板球系统如图1所示,由可以绕其中心 转动的板及伺服系统组成。伺服系统包括一个步进电机控 制卡、两个用于控制板倾斜的步进电机和一个用于测量球位 置的智能CCD视觉系统。平板支撑在O、A、B三点上,两台 步进电机可以分别使A、B点上下移动,带动平板倾斜以使球 在其上任意滚动。 板球系统目前已成功的在捷克大学的罗克维尔控制实 验室搭建起来,英国的学者也搭建了这个系统,并做了研究。 色I瞽拈 我们也已成功地在实验室搭建起板球控制的实物系统,并用 T—S模糊控制方法进行了控制,由于板的静摩擦、电机的时 延等理论研究时忽略掉的因素的影响,试验结果不尽如人 意。如在定点稳定试验中,球在稳定点附近振荡,难以稳定,
收稿13期:2005—08—09
ccD…苦 一坐标
图1 板球系统结构示意图 超调大,并且因此而直接影响轨迹跟踪、绕障试验的性能。 文献[6,7]提出的变论域自适应模糊控制思想,具有精度高、
165—
维普资讯 http://www.cqvip.com 无振荡、几乎无超调的特点,而且在变论域的观点下,模糊控 制器的设计也变得简单易行。本文将变论域自适应模糊控 制器应用于板球系统中,仿真结果证明该方法改善了控制的 效果,实物试验的结果也表明了这一点。 2板球系统的数学模型 板球系统是8状态变量双输入双输出的非线性动态系 统,可以用下面的数学模型描述: (m+ R2) + sin日 一 一myO =o (m+ + 一o o,=o r :( +J+m ) +2mxx'O +mxy‘'Oy+m y+mxyby+mgxc。s0 f r J P+j my2) r 2m#0T+mxyO +mi如x+mx询x+mgyeosO s (1) 其中m为小球质量, 为小球半径 Y为小球 、Y方向的位 移,0x,0y为平板 、Y方向的倾角, 、 为平板 、Y方向的外 力矩,‘,和 分别为小球和平板的转动惯量。为保证数学模 型的准确性,一般要求要求J 0 J<5。,J J<5。(即0. 088arc)。 令B:,∥(m+J/R ), : ,Oy=u ,,由式(4。1)得 系统状态方程为: 2 B( l ;+X4 5 8一gs ̄nx3) 0 6 B( 5 i+ 】x4 8一gsinx7) 8 0 (2) ( ,x,0 ,0 ,y, , 3 变论域自适应模糊控制器 模糊控制适用于具有模糊环境的粗糙控制场合,但对于 高精度的控制问题,模糊控制的效果不理想,还得依靠传统 控制。为提高模糊控制的精度,文献[4,5]提出了变论域自 适应模糊控制思想:在规则形式不变的前题下,论域随着误 差变小而收缩(亦可随着误差增大而扩展)。局部地看,论域 收缩相当于增加规则,也即插值结点加密,从而提高了精度。 下面简述变论域模糊控制器的控制思想和算法。 设输入变量 (i=1,2,…,n)的论域分别为X =[一E, E](i:1,2,…,n),输出变量Y的论域Y:[一 ,U];{A 1 ≤ ≤m)为 上的模糊划分。{B,}(1≤ ≤m)为l,上的模 糊划分。模糊系统的规则为: 166一 if xl is Ali and A2 is A and...and x is A then Y is BlJ: 1,2,…,m, (3) 设 为 的峰点,乃为 的峰点(i:1,2,…, , :1, 2,…,m),则基于(3)的模糊系统表现为一个n元分片插值 函数
y( , ,…, )=F( ,X2,…, )=∑1-IA (Xi)y, J=l i=1 (4) 变论域是指论域 与y可以分别随着变量 与Y的变化 而变化,记为:
X ( ):[一02 ( )E ,02 ( )E ] Y(Y)=[一 (Y)U, (Y)U] (5)
其中,OL ( )与卢(Y)叫做论域的伸缩因子。相对于变论 域,原来的论域x 与y便叫做初始论域。 采用如下的变论域伸缩因子:
( ):l一 ̄,exp(一kx ) 卢(£)垒卢(y( (£)))=k∑p ICi( )d +卢(0)(6) 1 b
式中, 为比例常数,初值卢(0)作为设计参数根据夹际情况 调整,通常可取口(0)=1。故变论域自适应模糊控制律为
u (£)=( ∑p fe ( )d +卢(0)) i=1
…砉 c , ㈩
4 板球系统的优化控制及仿真 板球系统中,要求小球滚动时没有滑动,这就必然使平 板摆动的角速度足够小,这样,(2)式中 和X4X 两项 可以忽略,因此系统可以分解成z方向和Y方向两个子系统, 分别表示如下:
B( l 一gsinx3) X4 0 X6 B(X5 —gsinx7)
8 0
上 9,
考虑到两个子系统的对称性,以下只讨论(8)式对应的 子系统的优化控制及仿真,结果同样适用于(9)式对应的子 系统。参照文献[4]中模糊控制器的设计,我们先设计普通 S模糊控制器。 模糊控制器的第 条控制规则如下: If e is Bn and x is Rq and 0x is 9m and 0x is Qin,
0 0 0 0 0 0 0 0 0 0 l 0 0 0 0 ‰ I1 (: I1"j 中 式 维普资讯 http://www.cqvip.com Then =一( e + +t0 +z40 )=一 (10) 其中e = 一 , 为期望位置的 值。输入(e , ,0 , )的论域分另0为[一0.2,0.2]m,[一0.04,0.04]m/s,[一 4e一3,4e一3]arc/Is,[一0.8e一3,0.8e一3]arc ̄s2,输出M 的论域为[一0.4e一3,0.4e一3]arc ̄s3。选取比例因子G = 5,G =25,G :250,G =1250,得到正规化的输入量( , 0x, )∈[一1,1]×[一1,1]×[一1,1]×[一1,1]。对于 每个输入量选取两个语言变量,NE(负)和PO(正),隶属函 数选为1/(1+l±1一 l ),如图2所示。
图2 输入隶属函数 各模糊控制规则后件的参数选为使在各个规则中心点 线性化后子模型在指标函数
|,=J( Qx+I.tTRu)dt (11) £ 0 下的最优反馈控制率,这里取Q和尺为单位阵。 在上述7’一s模糊控制器的基础上,加入论域伸缩因子:
d ( )=1一A exp(一 )(i:1,2,3,4) (12) 4 £(f)=k∑P r)d r+卢(0) (13) 1 b
其中的参数可在试验中不断尝试得出最佳值。本实验中 最后参数选为:
A=(A1,A2,A 3,A ) =(0.7,0.1,0.1,0.3) k=(k1,k2, ,k4) =(5,10,10,10) P=(Pl,P2,P3,P4) =(1,1,1,1) (14)
加入论域伸缩因子前后控制器的仿真曲线如图3所示。 图3中粗实线方波信号为输入信号,虚线为T—S模糊控制器 的响应曲线,细实线为变论域白适应模糊控制器的响应曲 线。 从仿真结果可以看出,在远离稳定点的区域,变论域白 适应模糊控制器与普通模糊控制器相差不大,这从(12)式 也可以看出,当很大时,d,( )一1。在靠近稳定点区域,变 论域白适应模糊控制器与普通模糊控制器差别就很明显,可 以看出,前者有更快的响应速度、更高的精度,并且几乎没有 超调。在实物系统的定点稳定试验中,在加入论域伸缩因子 后,小球能更快的稳定到指定的位置,在稳定点附近的振荡 次数明显减少。