板球系统实验指导书 MA AB
- 格式:pdf
- 大小:2.38 MB
- 文档页数:56
球杆系统GBB1004实验指导书V2..0一、系统建模1.球杆系统的机械模型:球杆系统机械结构原理图如图1-1:图1-1 球杆系统机械结构连线(连杆和同步带轮的连接点与齿轮中心的连线)和水平线的夹角为θ(θ的角度存在一定的限制,在最小和最大的范围之间),它作为连杆的输入,横杆的倾斜角α和θ之间的有如下的数学关系:角度θ和电机轴之间存在一个减速比n=4的同步带,控制器设计的任务是通过调整齿轮的角度θ,使得小球在某一位置平衡。
小球在横杆上滚动的加速度如下式:其中:小球在横杆上的位置r为输出小球的质量m = 0.11公斤;2 2 小球的半径R = 0.015米; 重力加速度g = -9.8米/秒2; 横杆长L = 0.4米; 连杆和齿轮的连接点与齿轮中心的距离为d = 0.04米;小球的转动惯量J = 2*m*R^2/5牛顿.秒2。
我们假设小球在横杆上的运动为滚动,且摩擦力可以忽略不计。
因为我们期望角度α在0附近,因此我们可以在0附近对其进行线性化,得到近 似的线性方程:拉氏变换得: r (s ) = mgd ⋅ 1 = 0.7 θ (s ) L ( J + m ) s s R 21.2 在Simulink 中建立球杆系统的模型 我们将直接建模运动学的非线性方程,系统方程包含r, d/dt(r), alpha, and d/dt(alpha),我们将使用非线性函数模块来描述这些函数,首先,我们要描述系统 的输出r 。
• 在Simulink 中打开一个新的模型。
• 从线性模块库中插入一个积分模块。
• 在上面的积分模块右边再添加一个积分模块,并把两个模块连接起来。
• 在连接线上加上"d/dt(r)"的注释,在连接线的附近双击就可以添加文字。
• 从第二个积分模块的输出端画一条线,并标识为"r"• 从Connections 模块库中插入一个Out 模块并和"r"信号线连接。
基于STM32单片机板球控制系统的设计与实现作者:魏敏张华正胡红新来源:《科学与财富》2018年第24期摘要:本文研究了一种基于STM32单片机的板球控制系统。
文章详细阐述了本系统的工作流程,硬件设计,软件编程和测试结果分析。
本系统采用了一块STM32f103微处理器作为主控芯片,通过串口通讯控制STM32f407微处理器对摄像头采集图像进行图像处理。
STM32f407将处理结果发送给主控芯片。
主控芯片通过PID算法计算控制量,输出PWM波控制两舵机。
舵机通过拉杆调节平板倾斜度,控制小球在平面上的运动。
经验证,本系统控制效果良好。
关键词:STM32单片机;图像处理;PID;舵机1系统方案1.1系统结构本系统主要由STM32F103控制核器、电机控制模块、按键模块、电源模块、液晶显示模块和图像处理等单元模块构成。
小球选用的是直径2.0cm的钢球,通过舵机带动平板上下运动,使得小球在平板上滚动,通过摄像头对小球位置进行检测,用STM32F407图像处理后的图像通过液晶显示屏显示,之后用PID算法精确调节舵机,使小球完成各项指标。
系统框图如下:1.2各部分方案选择与论证1.2.1机械结构方案选择与论证方案一:利用手头仅有的万向节与双舵机,将万向节固定在板子中下方,两个舵机分别放在相邻两边的中线处,成90度角,摄像头固定在距离平板大约80cm处,尽量还原经典板球结构,同时焊接相应配套铁架台来固定摄像头和单片机等器件。
方案二:采用悬挂式,将三个步进电机分别固定在所选铁架的三个角上,步进电机通过鱼线与对应木板角相连,木板最后一角处直接用线固定,通过三个步进电机的转动来控制与平板相连的线的伸缩从而控制平板的平衡,进而维持小球的正常运动。
方案二通过悬挂的方式致使平板很不稳,本身就存在抖动现象,受外界因素影响太大,自身缺陷太多,并且三个电机分布不均匀,使难度加大;由于最初我们采用的是方案二,实验结果并不理想,因此我们最终采用方案一,并取得理想结果。
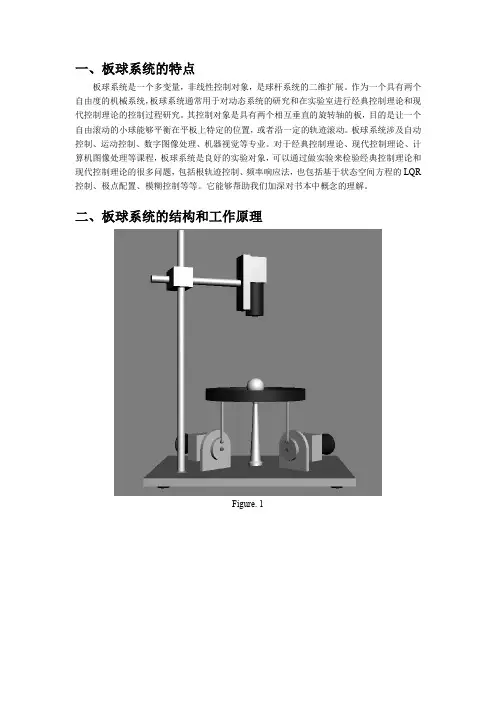
第20卷第4期2020年12月Vol.20No.4Dec.2020应用技术学报JOURNAL OF TECHNOLOGY文章编号:2096-3424(2020)04-0343-07DOI:10.3969/j.issn.2096-3424.2020.04.007板球系统平台设计方案研究陈芷琳,温晓静,刘鑫,王翔,丁肇红(上海应用技术大学电气与电子工程学院,上海201418)摘要:板球系统是一个非常经典的自动控制原理实验平台,其本身也是一个集合机械、电子、自动化以及计算机科学等各个学科的综合系统。
设计了搭建一整套完整的板球系统平台的方案,包括机械结构设计,硬件电路设计,嵌入式软件设计以及上位机设计,最后通过做出的实物平台验证了方案的可行性。
实验结果表明,该板球系统平台设计方案有较高的实用价值,制造成本低,同时该研究所设计的方案也为其他自动控制实验仪器设计提供了解决思路和方案,有较高的应用和推广价值。
关键词:板球系统;硬件设计;软件设计;系统集成中图分类号:TP23文献标志码:AResearch on Design Scheme of Ball and Plate SystemCHEN Zhilin,WEN Xiaojing,LIU Xin,WANG Xiang,DING Zhaohong(School of Electrical and Electronic Engineering,Shanghai Institute ofTechnology,Shanghai201418,China)Abstract:The ball and plate system is a very classic experimental platform for automatic control principles. It is also a comprehensive system that integrates various disciplines such as machinery,electronics, automation and computer science.This paper has proposed a solution to build a complete set of ball and plate system platforms,including mechanical structure design,hardware circuit design,embedded software design and host computer design,finally,the feasibility of the program was verified by the physical platform made・The experimental results show that the design scheme of the ball and plate system platform has high practical value and low manufacturing cost.At the same time,this scheme also provides solutions and solutions for the design of other automatic control experimental instruments.Key words:ball and plate;hardware design;software design;system integration自从20世纪80年代末板球系统开始被国内外学者当作研究对象来验证各种控制算法,板球系统的研究已经经历了从simulink模型仿真验证到实物平台实时控制的过渡卩幻,陆续有各个课题组实验室以及企业生产制造出各类板球系统实物平台,其中国内比较常用的是由固高科技公司生产的GPB2001板球系统,其平台实物和上位机界面如图1所示。
MATLAB实验指导书电子信息工程学院2012.02目录实验一MATLAB安装与界面 (1)实验二MATLAB符号计算与应用 (2)实验三MATLAB数值数组与向量化运算 (4)实验四MATLAB数值计算 (7)实验五MATLAB可视化 (10)实验六M文件及MATLAB综合应用 (15)实验一Matlab安装与界面【实验目的】【实验原理】1. 安装MATALB软件,并按理论教学内容逐一熟悉软件界面及软件特点。
【实验仪器】1.配置在PIV2.0GHZ/512MB以上的PC机;2. MATALB7.0以上版本软件。
【实验内容及步骤】1. 完成MATLAB软件安装;2.熟悉MATLAB运行环境。
(1)命令窗口的使用。
(2)工作空间窗口的使用。
(3)工作目录、搜索路径的设置。
(4)命令历史记录窗口的使用。
(5)了解各菜单的功能。
3. 图示复数iziz21,3421+=+=的和展示MATLAB的可视化能力;4. 画出衰减振荡曲线teyt3sin3-=,的取值范围是]4,0[π;展示数组运算的优点及MATLAB的可视化能力。
5. 创建一个M文件,输入步骤4的相关程序,运行程序并变换名称保存,将工作空间中的y变量的MAT文件变换路径输出保存,然后再向内存装载MAT文件。
6. 以命令窗口中输入help Laplace、help浏览器中搜索两种方式体会MATLAB帮助系统的特点和功能。
【实验报告要求】1.整理实验结果。
2.总结实验心得体会实验二 Matlab 符号计算与应用【实验目的】1. 掌握MATLAB 符号计算的基本语法规则2. 掌握MATLAB 符号计算求解微积分、线性代数问题3. 熟悉MATLAB 符号计算在信号处理领域的应用【实验原理】1. 以MATALB 与MuPAD 库函数间符号计算机理和基本的微积分运算原理为基础,研究常见的工程定解问题以及连续信号处理问题。
【实验仪器】1.配置在PIV2.0GHZ/512MB 以上的PC 机; 2. MATALB7.0以上版本软件。
球杆系统稳定性分析实习报告实验地点:自动化专业实验室实验日期:2013-7.8—小组成员:指导教师:目录一、球杆系统简述二、球杆系统数学模型三、球杆系统在Simulink 下的模型建立四、控制器设计和仿真1.P控制2.PD控制3.PID控制4.根轨迹控制5.频率响应法控制一、系统简述球杆系统(Ball & Beam )是为自动控制原理等基础控制课程的教学实验而设计的实验设备。
该系统涵盖了许多经典的和现代的设计方法。
这个系统有一个非常重要的性质——它是开环不稳定的。
不稳定系统的控制问题成了大多数控制系统需要克服的难点,有必要在实验室中研究。
但是由于绝大多数的不稳定控制系统都是非常危险的,因此成了实验室研究的主要障碍。
而球杆系统就是解决这种矛盾的最好的实验工具,它简单、安全并且具备了一个非稳定系统所具有的重要的动态特性。
整个装置由球杆执行系统、控制器和直流电源等部分组成。
该系统对控制系统设计来说是一种理想的实验模型。
正是由于系统的结构相对简单,因此比较容易理解该模型的控制过程。
球杆执行系统(如图1 所示)由一根V 型轨道和一个不锈钢球组成。
V 型槽轨道一侧为不锈钢杆,另一侧为直线位移电阻器。
当球在轨道上滚动时,通过测量不锈钢杆上输出电压可测得球在轨道上的位置。
V 型槽轨道的一端固定,而另一端则由直流电机(DC motor )的经过两级齿轮减速,再通过固定在大齿轮上的连杆带动进行上下往复运动。
V 型槽轨道与水平线的夹角可通过测量大齿轮转动角度和简单的几何计算获得。
这样,通过设计一个反馈控制系统调节直流电机的转动,就可以控制小球在轨道上的位置。
GBB1004 型球杆系统由三大部分组成:IPM100 智能驱动器、球杆装置和控制计算机。
图1 球杆系统执行机构原理图在一长约0.4 米的轨道上放置一不锈钢球,轨道的一侧为不锈钢杆,另一侧为直线位移传感器,当球在轨道上滚动时,通过测量不锈钢杆上输出的电压信号可获得球在轨道上的位置x 。
基于PID算法的板球控制系统设计摘要:本文介绍了一个基于PID算法的板球控制系统设计。
板球是一种具有复杂控制问题的运动项目,需要实时调整投球机构的角度和速度来使球准确投向目标。
PID算法是一种常用的控制算法,适用于各种具有线性或非线性特性的系统。
在本设计中,利用PID算法实现了对板球投球机构的精确控制,并通过仿真和实验验证了系统的有效性。
1.引言板球是一项传统的运动项目,需要运动员准确把球投向对手设立的目标。
由于板球机构的运动特性复杂,需要实时调整角度和速度以适应不同的场景。
传统的机械控制方法需要实时测量系统状态并进行计算,无法在动态环境中实现精准控制。
PID算法是一种经典的控制算法,可根据系统的误差、偏差和积分量来实现闭环控制。
2.系统设计板球控制系统由以下三个部分组成:输入模块、控制模块和输出模块。
输入模块:输入模块负责测量系统状态,包括角度和速度,以及目标状态。
角度和速度可以通过传感器实时测量,目标状态可以通过用户输入或预设值获得。
控制模块:控制模块使用PID算法根据当前状态和目标状态计算控制量,即需要调整的角度和速度。
PID算法包括三个关键参数:比例系数Kp、积分系数Ki和微分系数Kd。
这些参数通过实验来调整,以保证系统的快速响应和稳定性。
输出模块:输出模块将控制量转换为电机控制信号,即将调整后的角度和速度转化为实际的运动。
电机控制信号可以通过电机驱动器来实现。
3.PID算法PID算法根据当前状态和目标状态计算控制量,以实现闭环控制。
PID算法的计算公式为:输出信号=Kp*偏差+Ki*积分+Kd*微分其中,偏差是当前状态与目标状态的差异,积分是偏差的累积和,微分是偏差的变化率。
比例系数Kp权衡了快速响应和稳定性,积分系数Ki 解决了稳态误差,微分系数Kd对抗了速度的变化。
4.仿真和实验为了验证系统的有效性,对板球控制系统进行了仿真和实验。
在仿真实验中,利用MATLAB / Simulink对板球控制系统进行了建模和仿真。
GBB 系列球杆系统实验指导书I 目录第1章 GBB 系列球杆系统说明........................................................................................................ - 1 -1.1 系统简述 ....................................................................................................................................... - 1 -1.2 系统组成 ....................................................................................................................................... - 1 -1.3 实验及特点 ................................................................................................................................... - 3 -第2章 球杆系统对象机构设计与装配实践 ..................................................................................... - 4 -2.1 实验目的 ....................................................................................................................................... - 4 -2.2 实验原理 ....................................................................................................................................... - 4 -2.3 实验设备 ....................................................................................................................................... - 6 -2.4 实验内容 ....................................................................................................................................... - 6 -第3章 球杆系统的创新结构设计实验 ............................................................................................. - 7 -3.1 实验目的 ....................................................................................................................................... - 7 -3.2 实验原理 ....................................................................................................................................... - 7 -3.3 实验设备 ....................................................................................................................................... - 8 -3.4 实验内容 ....................................................................................................................................... - 8 -第4章 小球直线位移测量实验和AD 转换 ..................................................................................... - 9 -4.1 实验目的 ....................................................................................................................................... - 9 -4.2 实验原理 ....................................................................................................................................... - 9 -4.3 实验设备 ..................................................................................................................................... - 10 -4.4 实验内容 ..................................................................................................................................... - 11 -第5章 角度位移测量实验-模拟方法(电位器) .......................................................................... - 12 -5.1 实验目的 ..................................................................................................................................... - 12 -5.2 实验原理 ..................................................................................................................................... - 12 -5.3 实验设备 ..................................................................................................................................... - 12 -5.4 实验内容 ..................................................................................................................................... - 12 -第6章 角度位移测量实验-数字方法(编码器) .......................................................................... - 13 -6.1 实验目的 ..................................................................................................................................... - 13 -6.2 实验原理 ..................................................................................................................................... - 13 -6.3 实验设备 ..................................................................................................................................... - 14 -6.4 实验内容 ..................................................................................................................................... - 14 -第7章 数字滤波分析 ....................................................................................................................... - 16 -7.1 实验目的 ..................................................................................................................................... - 16 -7.2 实验原理 ..................................................................................................................................... - 16 -7.3 实验设备 ..................................................................................................................................... - 18 -7.4 实验内容 ..................................................................................................................................... - 18 -第8章 直流伺服电机参数辨识实验 ............................................................................................... - 19 -8.1 实验目的 ..................................................................................................................................... - 19 -8.2 实验原理 ..................................................................................................................................... - 19 -8.3 实验设备 ..................................................................................................................................... - 20 -8.4 实验内容 ..................................................................................................................................... - 20 -第9章 直流伺服电机的调速控制实验 ........................................................................................... - 22 -9.1 实验目的 ..................................................................................................................................... - 22 -II 9.2 实验原理 ..................................................................................................................................... - 22 -9.3 实验设备 ..................................................................................................................................... - 23 -9.4 实验内容 ..................................................................................................................................... - 23 -第10章 直流伺服电机的位置控制实验 ......................................................................................... - 26 - 10.1 实验目的 ................................................................................................................................... - 26 - 10.2 实验原理 ................................................................................................................................... - 26 - 10.3 实验设备 ................................................................................................................................... - 27 - 10.4 实验内容 ................................................................................................................................... - 27 -第11章 测速发电机实验 ................................................................................................................. - 29 - 11.1 实验目的 ................................................................................................................................... - 29 - 11.2 实验原理 ................................................................................................................................... - 29 - 11.3 实验设备 ................................................................................................................................... - 30 - 11.4 实验内容 ................................................................................................................................... - 30 -第12章 智能伺服驱动器的使用与编程(计算机接口实验等) ................................................. - 31 - 12.1 实验目的 ................................................................................................................................... - 31 - 12.2 实验原理 ................................................................................................................................... - 31 - 12.3 实验设备 ................................................................................................................................... - 33 - 12.4 实验内容 ................................................................................................................................... - 33 -第13章 球杆系统的数学模型 ......................................................................................................... - 34 - 13.1 实验目的 ................................................................................................................................... - 34 - 13.2 实验原理 ................................................................................................................................... - 34 - 13.3 实验设备 ................................................................................................................................... - 38 - 13.4 实验内容 ................................................................................................................................... - 39 -第14章 球杆系统的数字P 控制器设计 ......................................................................................... - 40 - 14.1 实验目的 ................................................................................................................................... - 40 - 14.2 实验原理 ................................................................................................................................... - 40 - 14.3 实验设备 ................................................................................................................................... - 41 - 14.4 实验内容 ................................................................................................................................... - 41 -第15章 球杆系统的模拟P 控制器设计 ......................................................................................... - 43 - 15.1 实验目的 ................................................................................................................................... - 43 - 15.2 实验原理 ................................................................................................................................... - 43 - 15.3 实验设备 ................................................................................................................................... - 45 - 15.4 实验内容 ................................................................................................................................... - 45 -第16章 球杆系统的数字PD 控制器设计 ...................................................................................... - 46 - 16.1 实验目的 ................................................................................................................................... - 46 - 16.2 实验原理 ................................................................................................................................... - 46 - 16.3 实验设备 ................................................................................................................................... - 47 - 16.4 实验内容 ................................................................................................................................... - 47 -第17章 球杆系统的模拟PD 控制器设计 ...................................................................................... - 49 - 17.1 实验目的 ................................................................................................................................... - 49 - 17.2 实验原理 ................................................................................................................................... - 49 - 17.3 实验设备 ................................................................................................................................... - 50 - 17.4 实验内容 ................................................................................................................................... - 50 -GBB 系列球杆系统实验指导书III 第18章 球杆系统的数字PID 控制器设计 .................................................................................... - 51 - 18.1 实验目的 ................................................................................................................................... - 51 - 18.2 实验原理 ................................................................................................................................... - 51 - 18.3 实验设备 ................................................................................................................................... - 52 - 18.4 实验内容 ................................................................................................................................... - 52 -第19章 球杆系统的模拟PID 控制器设计 .................................................................................... - 54 - 19.1 实验目的 ................................................................................................................................... - 54 - 19.2 实验原理 ................................................................................................................................... - 54 - 19.3 实验设备 ................................................................................................................................... - 56 - 19.4 实验内容 ................................................................................................................................... - 56 -第20章 球杆系统在MATLAB SIMULINK 环境下的实时控制 ............................................... - 57 - 20.1 实验目的 ................................................................................................................................... - 57 - 20.2 实验原理 ................................................................................................................................... - 57 - 20.3 实验设备 ................................................................................................................................... - 63 - 20.4 实验内容 ................................................................................................................................... - 63 - 附录1 电路原理图 ............................................................................................................................ - 64 - 附录2 电气接线图 ............................................................................................................................ - 65 -GBB 系列球杆系统实验指导书- 1 - 第1章 GBB 系列球杆系统说明1.1 系统简述GBB 系列球杆系统是专为自动控制原理等基础控制课程的教学实验而开发、设计的实验设备,它是一个安全的开环不稳定物理系统,可以将许多抽象的控制概念通过物理学运动直观的表现出来,有趣而富有挑战性,因此特别适合于基础控制课程实验。
板球控制系统课程设计一、课程目标知识目标:1. 学生能理解板球控制系统的基本原理,掌握相关的物理知识和数学模型;2. 学生能描述控制系统的组成部分,了解各部分功能及其相互关系;3. 学生能运用所学的知识,分析并解释板球控制系统的运动规律和稳定性。
技能目标:1. 学生能够运用编程语言设计简单的板球控制系统程序,实现板球的稳定控制;2. 学生能够运用传感器收集板球运动数据,通过数据处理分析系统性能;3. 学生能够通过小组合作,解决实际问题,提高团队协作和沟通能力。
情感态度价值观目标:1. 学生能够培养对科学研究的兴趣,增强探究精神和创新意识;2. 学生能够认识到控制技术在现实生活中的应用,提高对科技与社会关系的认识;3. 学生能够通过课程学习,培养自主学习、持续发展的学习习惯,形成积极向上的学习态度。
课程性质:本课程为实践性较强的课程,结合理论知识与实践操作,培养学生的动手能力和实际问题解决能力。
学生特点:学生处于高年级阶段,具有一定的物理和数学基础,思维活跃,对新技术和新知识具有好奇心。
教学要求:教师应注重理论与实践相结合,引导学生主动参与,鼓励学生积极思考,培养学生的创新意识和团队协作能力。
通过课程学习,使学生能够达到上述具体的学习成果。
二、教学内容1. 板球控制系统的基本原理及其数学模型,涉及物理知识如力学、运动学,数学知识如微分方程等;教材章节:《自动控制原理》第2章“控制系统的数学模型”。
2. 控制系统的组成部分,包括控制器、执行器、传感器等;教材章节:《自动控制原理》第3章“控制系统的组成与分类”。
3. 编程语言及编程技巧,以实现板球控制系统的程序设计;教材章节:《计算机编程基础》第4章“C语言编程基础”。
4. 传感器的工作原理及其在板球控制系统中的应用;教材章节:《传感器与检测技术》第2章“传感器的工作原理及分类”。
5. 数据处理与分析方法,包括数据的采集、处理、分析及优化;教材章节:《数据处理与分析》第3章“数据采集与处理”。
实验一:M a t l a b操作环境熟悉一、实验目的1.初步了解Matlab操作环境。
2.学习使用图形函数计算器命令funtool及其环境。
二、实验内容熟悉Matlab操作环境,认识命令窗口、内存工作区窗口、历史命令窗口;学会使用format命令调整命令窗口的数据显示格式;学会使用变量和矩阵的输入,并进行简单的计算;学会使用who和whos命令查看内存变量信息;学会使用图形函数计算器funtool,并进行下列计算:1.单函数运算操作。
➢求下列函数的符号导数(1) y=sin(x);(2) y=(1+x)^3*(2-x);➢求下列函数的符号积分(1) y=cos(x);(2) y=1/(1+x^2);(3) y=1/sqrt(1-x^2);(4) y=(x-1)/(x+1)/(x+2);➢求反函数(1) y=(x-1)/(2*x+3);(2) y=exp(x);(3) y=log(x+sqrt(1+x^2));➢代数式的化简(1) (x+1)*(x-1)*(x-2)/(x-3)/(x-4);(2) sin(x)^2+cos(x)^2;(3) x+sin(x)+2*x-3*cos(x)+4*x*sin(x);2.函数与参数的运算操作。
➢从y=x^2通过参数的选择去观察下列函数的图形变化(1) y1=(x+1)^2(2) y2=(x+2)^2(3) y3=2*x^2(4) y4=x^2+2(5) y5=x^4(6) y6=x^2/23.两个函数之间的操作➢求和(1) sin(x)+cos(x)(2) 1+x+x^2+x^3+x^4+x^5➢乘积(1) exp(-x)*sin(x)(2) sin(x)*x➢商(1) sin(x)/cos(x);(2) x/(1+x^2);(3) 1/(x-1)/(x-2);➢求复合函数(1) y=exp(u) u=sin(x)(2) y=sqrt(u) u=1+exp(x^2)(3) y=sin(u) u=asin(x)(4) y=sinh(u) u=-x三、设计提示1.初次接触Matlab应该注意函数表达式的文本式描述。
《matlab原理与应用》实验指导书实验一 MATLAB集成环境使用实验性质:验证性实验级别:必做开课单位:信息与通信工程学院通信工程系学时:2学时一、实验目的:1、了解与MATLAB的运行环境相关的各类窗口及其相应的功能特点。
二、实验器材:安装matlab软件的计算机三、实验理论3.1 启动和退出M AT L A B不同的计算机系统,M AT L A B的启动也不一样。
在Windows 和M a c i n t o s h系统中,程序通常通过点击一个图标而启动。
在U N I X系统中,程序是通过在命令行系统提示符后键入如下字符启动:matlab如果上述工作有问题,可请教系统管理员。
当启动MATLAB时,如果matlab rc . m和startu p . m文件存在,则执行这些文件。
在这些文件中,为满足个人需要,用户可以给定命令以调整M AT L A B,例如,constants用于设置图形等。
在一个多用户系统上,系统管理员存储matlabrc . m文件,但你也能为自己的使用创建文件startup.m。
要退出MATLAB,键入quit或exit。
1、退出和中断e x i t,q u i t 结束M AT L A B会话。
程序完成,如果没有明确保存,则变量中的数据丢失。
Ctrl-c 中断一个MATLAB任务。
例如,当M AT L A B正在计算或打印时,中断一个任务,但会话并没有结束。
除此之外,对一些系统有指定的菜单选择。
例如,在Wi n d o w s和M a c i n t o s h系统中,在文件菜单下可以找到选项q u i t。
当编辑或执行M AT L A B时,下列的快捷键十分有用。
通常因为不同的平台使用不同的键,因此,给定了一些替换键。
在你的系统上试一下这些键,注意哪些键组合使用。
2、特殊的功能键↑或C t r l_p 恢复前面的命令。
↓或C t r l_n 恢复当前命令之后键入的命令。
基于视觉位置检测的板球系统作者:黄佳遥马茗萱朱桐来源:《电子技术与软件工程》2017年第24期摘要本文以基于摄像头识别的板球控制系统为研究对象,使得小球能在平板上的指定位置停留,并按照指定轨迹运动。
首先进行板球系统平台机械结构部分的搭建,进而进行小球位置识别的算法设计与PID参数整定。
将采集到的图像进行预处理操作,随后运用霍夫圆变换算法找到小球位置,并将采集到的小球位置传入STM32系列的单片机主控系统。
通过对系统参数的不断调整,使得整个系统具有较好的跟踪效果与鲁棒性。
【关键词】板球系统 PID控制霍夫圆变换板球控制系统研究起始于上世纪八十年代末期,对于板球系统的研究可以分为两个阶段,第一阶段是在SIMULINK环境下建立数学模型,进行仿真;第二阶段是研发板球控制系统,从而在实物平台上验证相关控制算法。
随着科学技术的发展,对于板球系统的研究也越来越深入。
由于小球在平板上的运动无固定轨道约束,所以要靠电机带动板的运动来控制小球的运动。
这一运动的随机性加上板与球之间摩擦力及空气阻力的影响,使得在平板上控制小球按照一定轨迹去运动变得富有挑战而有意义。
1 总体设计方案板球系统主要由控制器、舵机、平板、小球和摄像头等部分构成。
利用搭载STM32F7系列处理器的OpenMV摄像头解决方案对小球之于平板的位置图像进行处理,获取小球相对于平板的位置坐标并将相关数据传入主控制器。
主控制器通过整定之后的PID参数来调节和控制舵机的运动,抬升或下降平板位置,从而控制小球在平板上的运动。
2 硬件结构2.1 机械结构采用两个舵机组成电机组,同样,将两个舵机固定在支柱上,通过支架与顶板固定连接。
具体构造如图 1 机械结构示意图所示。
舵机的主要组成部分为伺服电机,其中包含伺服电机控制电路和减速齿轮组。
舵机含有伺服电机没有的减速齿轮组。
限位舵机靠输出轴下面的电位器来确定舵机转向角度。
通过脉冲调制PWM信号就可以控制舵机。
主控系统可以轻松地输出该信号。
基于反演自适应的板球控制的设计基于反演自适应的板球控制的设计摘要:板球是一项受欢迎的运动项目,而基于反演自适应控制的设计可以帮助球队在比赛中实现更好的控制和反应能力。
本文介绍了基于反演自适应控制的板球控制设计的基本原理和实施步骤,并简要讨论了这种控制方法在板球运动中的应用前景。
1. 引言板球是一项受欢迎的运动项目,拥有广泛的球迷群体。
在板球比赛中,球队的胜负往往取决于球队的控球能力和反应速度。
因此,设计一种有效的板球控制方法对于球队的成功至关重要。
2. 反演自适应控制原理反演自适应控制是一种基于系统模型的控制方法,它通过反演系统模型来实现期望输出和实际输出之间的误差最小化。
在板球控制中,我们可以将球和球拍的运动过程视为一个动态系统,通过反演模型来控制球的运动轨迹。
3. 基于反演自适应的板球控制设计3.1 控制系统建模首先,我们需要建立板球控制的数学模型。
该模型需要考虑到球的质量、球拍的力量、球速和球的旋转等因素。
通过对这些因素进行建模,我们可以得到球的运动方程和球拍的控制参数。
3.2 系统辨识系统辨识是反演自适应控制的关键步骤之一。
通过实验和数据采集,我们可以获取到球的运动轨迹和相关参数。
然后,我们可以使用系统辨识方法来确定系统的动态特性和模型参数。
3.3 控制器设计基于反演自适应的控制器设计是实现板球控制的核心。
在设计控制器时,我们需要考虑系统的非线性特性和外部干扰。
通过反演控制模型和使用自适应算法,我们可以实现对板球运动的实时控制。
4. 实施步骤4.1 系统参数的获取首先,我们需要收集球的运动数据,包括球的速度、轨迹和相关参数。
这可以通过激光测距仪、高速摄像机等设备来完成。
4.2 系统辨识基于获取到的数据,我们可以进行系统辨识,确定系统的动态特性和模型参数。
4.3 控制器的设计和优化根据系统模型和辨识结果,设计反演自适应控制器,并通过仿真和实验进行优化和调试。
4.4 实施和评估将设计的控制器应用到实际的板球系统中,并通过与传统控制方法的对比,评估反演自适应控制方法的效果与性能。
在板球运动中的加速度运动学:——在球场上的对于选手成绩的影响文章内容摘要板球防守通常包括利用最大加速度来获得球。
对于主要在内野区(接近球场内部)或外野区(接近球场边缘)的球员没有针对性的加速度的分析。
这项工作主要研究有经验的板球运动员在十米冲刺中的前两个动作。
年龄在24.06+-4.87岁之间,身高在1.81+-0.06米之间,体重在79.67+-10.37千克的男性被选定为主内野手或外野手。
计时灯记录0—5米和0—10米的时间。
捕捉测量第一步和第二步的动作,包括:步长、步频、与地面接触时间、肩部的运动、牵引手肘向后弯曲的角度、牵拉腿部髋关节和膝关节伸展程度、脚踝的跖屈、髋关节和膝关节屈曲的摆动程度、足背的屈曲程度。
单因素的方差分析取决于组别差异(p<0.05)。
数据汇集了Pearson的相关研究(p<0.05)来分析板球运动与远动学的关系。
对于只存在几个变量差异的内野手和外野手,在冲刺阶段的运动几乎没有差别。
左肩膀的范围取决于第二步的步长(r=0.047),第一步的髋关节屈曲程度和两步的长度(r=0.570--0.598)和频率(r=0.504—0.606)有关,第一步膝关节的屈曲程度和两步的步长(r=0.528—0.682)和第一步的步频(r=0.692),第一步的脚踝跖屈程度与第二步的步长(r=0.692)和步频(r=0.726)。
更大的关节运动幅度和更长的步长有关。
从板球运动员们的表现显示冲刺运动与所在的防守位置无关,可能是因为运动员在内野或是外野防守是取决于比赛形式的。
由于肩部和腿部运动的联系,以及步长的重要性和可训练性,板球运动员们应该瞄准这个目标提高加速度。
关键词:生物力学、板球运动、防守、步长、冲刺、屈腿摆动。
介绍板球是一项在许多国家都流行的运动,包括英国、澳大利亚、印度、新西兰以及南美洲国家。
有几种类型的板球运动,例如有种长的需要连续五天的比赛,短一点的需要包括一天或T20板球。