微波遥感基础
- 格式:docx
- 大小:25.71 KB
- 文档页数:4
第一章微波遥感基础微波遥感的优越性:1、微波能穿透云雾、雨雪,具有全天候工作能力。
2、微波对地物有一定穿透能力。
3、微波提供不同于可见光和红外遥感所能提供的某些信息4、微波遥感的主动方式可进行干涉测量,可以对地形变化进行监测。
微波遥感分类:被动微波遥感和主动微波遥感被动微波遥感:系统自身不发射微波波束,只是接收目标物发射或散射的微波辐射主动微波遥感:系统自身发射微波辐射,并接收从目标反射或散射回来的电磁波电磁波:以波动的形式在空间传播并传递电磁能量的交变电磁场。
电磁波具有波长(或频率)、传播方向、振幅和极化面(亦称偏振面)四个基本物理量。
叠加原理:当空间同时存在由两个或两个以上的波源产生的波时,每个波并不因其他的波的存在而改变其传播规律,仍保持原有的频率或波长和振动方向,按照自己的传播方向继续前进,而空间相遇点的振动的物理量等于各个独立波在该点激起的振动物理量之和。
干涉:由两个(或两个以上)频率、振动方向相同,相位相同或相位差恒定的电磁波在空间叠加时,合成波振幅为各个波的振幅矢量和。
因此,会出现交叠区某些地方振动加强,某些地方振动减弱或完全抵消的现象。
波的极化:指在空间给定点上电场强度矢量的取向随时间变化的特性。
用电场强度矢量的端点在空间描绘出的轨迹来表示。
去极化:产生交叉极化的过程称为去极化。
大气对微波的衰减作用主要有大气中水分子和氧分子对微波的吸收,大气微粒对微波的散射。
逆着入射方向的散射分量称为后向散射。
第二章微波遥感系统成像系统:是以非摄影方式获取地物遥感影像的各类遥感器系统的统称。
脉冲:在短时间内突变,随后又迅速返回其初始值的物理量。
脉冲信号:相对于连续信号在整个信号周期内短时间发生的信号,大部分信号周期内没有信号脉冲宽度:脉冲的持续时间。
脉冲重复频率:指雷达发射脉冲的速率,即每秒钟发射脉冲的个数。
平行于雷达飞行方向的分辨率称为方位向分辨率,垂直于飞行方向的称为距离向分辨率。
距离向分辨率指在脉冲发射方向上(距离向)能分辨两个目标的最小距离。
3. 微波遥感3.1 引言微波遥感包括主动式遥感和被动式遥感。
正如第2章所描述的,光谱的微波部分波长范围大约是1厘米至1米。
因为与可见光和红外线相比,微波的波长较长,这种特殊性对于遥感来说是非常重要的。
由于波长较长的光受大气散射的影响比波长较短的光要小,因此长波段的微波辐射可以穿透云层,薄雾,尘埃等(除了在暴雨情况下)。
这种特性使得几乎在所有的气候和环境条件下,都能进行微波能量的探测,从而可以在任何时间收集数据。
被动微波遥感在概念上与热红外遥感相似。
所有物体都能发射一部分数量的微波能量,但一般都不多。
被动微波传感器能探测在其视野范围内的自然辐射的微波能量。
这些辐射的能量与辐射体或辐射体表面的温度和湿度有关。
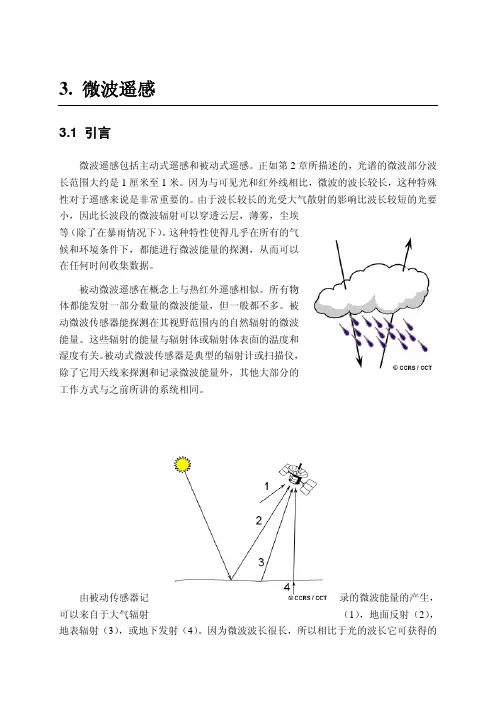
被动式微波传感器是典型的辐射计或扫描仪,除了它用天线来探测和记录微波能量外,其他大部分的工作方式与之前所讲的系统相同。
由被动传感器记录的微波能量的产生,可以来自于大气辐射(1),地面反射(2),地表辐射(3),或地下发射(4)。
因为微波波长很长,所以相比于光的波长它可获得的能量就相当少。
因此所需要的视野域必须大到能探测足够的能量以记录一个信号。
因此大部分的被动微波传感器的空间分辨率都比较低。
被动微波遥感可以应用于气象,水文和海洋学的研究。
通过观察大气本身,或"透过"大气观测(这依赖于波长),气象学家可以利用被动式微波测量大气剖面,并确定大气中水和臭氧的含量。
微波的发射受水分含量的影响,因此水文学家可使用被动式微波测量土壤湿度。
海洋学的应用包括绘制海冰图,海流图,海面风场图以及污染物的探测,如浮油。
主动微波传感器自己能提供微波辐射源来照射目标。
主动微波传感器通常分为两个截然不同的类型:成像和非成像传感器。
最常见的一种成像主动式微波传感器是雷达。
雷达(RADAR)是无线电探测和测距(RAdioDetection And Ranging)的简称,它的全名实际上也概括了雷达传感器的功能和操作方式。
2 微波遥感基础原理本章要点本章从电磁波传播的基本概念到SAR 的基本原理对于雷达遥感的基本知识作了概要的介绍,包括相干成像和合成孔径的概念、重要的参数、SAR影像的基本特征等。
主要内容§2.1 微波遥感物理基础§2.2 真实孔径雷达基本原理§2.3 SAR系统基本原理§2.4 SAR影像的主要特性2.1 微波遥感物理基础作业:目标的散射特性与哪些因素有关?在真空或介质中通过传播电磁场的振动而传输电磁能量的波。
E为电场矢量方向,M为磁场矢量方向,C为传播方向。
• 电磁波是时间和空间的函数• 电场矢量和磁场矢量相互垂直,而且又都垂直于传播方向• 电磁波具有波动性和粒子性• 波长、相干性、叠加性和极化等都是电磁波的重要特性+幅度和相位• 如果某电磁波的电场矢量和磁场矢量均在垂直于传播方向的平面上,并且幅度为常数,则称为平面波在均匀介质中电磁波随时间作正弦变化,波长或频率是描述电磁波重要的参量。
微波偏振与极化Polarization电磁波遇到“狭缝”的障碍物时,能够通过狭缝的振动分量,称为电磁破的偏振非偏振光,偏振光,部分偏振EHZE 线极化H ZE 椭圆极化H ZE 圆极化H Z极化即电场振动方向的变化趋势,线极化是电场矢量方向Polarization of Microwave水平极化是指电场矢量与入射面垂直 垂直极化是指电场矢量与入射面平行EHZ 垂直极化同极化HH,VV交叉极化HV,VH目标入射平面衍射衍射:波在传播过程中经过障碍物边缘或孔隙时所发生的传播方向弯曲现象。
远场衍射,也称夫琅和费衍射,若光源或观察屏离开衍射孔或缝为无限远,这种衍射现象称远场衍射。
衍射现象是波的特有现象,一切波都会发生衍射现象;孔隙越小,波长越大,这种现象就越显著。
衍射对微波遥感的两个意义:天线;感兴趣的地表目标的大小与微波传感器的波长是相当的(毫米-米),土壤粗糙度、树枝、麦秆、水波和海浪等。
微波遥感基础微波遥感基础微波遥感基础 (1)⼀、微波遥感物理基础 (2)⼆、微波遥感技术的简介 (4)2.1 微波遥感 (4)2.2 微波遥感器 (5)2.2.1 雷达散射计 (5)2.2.2 微波辐射计 (5)2.2.3 雷达⾼度计 (6)2.3 微波遥感技术的特点 (7)2.4 微波遥感的优越性 (7)2.5 微波遥感的不⾜ (7)2.6 微波微波拥有强⼤⽣命⼒的根源 (7)2.7 我国微波遥感的差距 (8)三、雷达概念、分类 (8)3.1 成像雷达 (8)3.2 ⾮成像雷达 (8)3.3 真实孔径雷达 (9)3.4 合成孔径雷达 (9)3.5 极化雷达 (10)3.6 ⼲涉雷达 (11)3.7 激光雷达 (11)3.8 侧视雷达 (11)四、微波遥感图像 (11)4.1雷达图像 (11)4.1.1雷达图像 (11)4.1.2 雷达图像显⽰ (12)4.1.3 雷达图像分辨率 (12)4.1.4 雷达图像的处理 (12)4.2 侧视雷达图像 (13)4.3 雷达图像校准 (14)4.4 雷达图像定标 (14)4.5 雷达图像模拟 (14)五、微波遥感定标 (15)六、微波遥感概念、理论和技术的突破 (15)七、我国微波遥感的差距 (16)⼋、微波相关技术介绍 (17)8.1 偏振探测技术的特点 (17)8.2 微波散射特性 (18)九、微波遥感有待进⼀步研究的问题 (19)⼗、微波遥感的应⽤ (20)10.1 空间对地观测 (20)⼀、微波遥感物理基础电磁波具有波长(或频率)、传播⽅向、振幅和极化⾯(亦称偏振⾯)四个基本物理量。
极化⾯是是指电场振动⽅向所在的平⾯。
电磁波谱有时把波长在mm到km很宽的幅度内通称为⽆线电波区间,在这⼀区间按照波长由短到长⼜可以划分为亚毫⽶波、毫⽶波、厘⽶波、分⽶波、超短波、短波中波和长波。
其中的毫⽶波,厘⽶波和分⽶波三个区间称为微波波段,因此有时⼜更明确地吧这⼀区间分为微波波段和⽆线电波段。
2§2.1 微波遥感物理基础§2.2 真实孔径雷达基本原理§2.3 SAR系统基本原理§2.4 SAR影像的主要特性真实孔径雷达的分辨率C τC τΔR r = ΔR g = (斜距分辨率) 2(地距分辨率) 2 cos βΔL = βR = λR d (方位向分辨率)=λH d sin β<==波束之脉冲时间 τ 越小,距离向分辨率越高,但 τ 太小则发射功率下降,降低后向散射的信噪比脉冲压缩技术理论上增加孔径 d 就可以提高方位向分辨率,但实际上难以实现,因为孔径的大小决定了天线几何尺寸的大小合成孔径技术<==1 SAR工作原理2 SAR分辨率3 聚焦补偿4 脉冲压缩原理5 多普勒频移与方位压缩6 SAR图像的成像SAR的出发点• SAR通过飞行平台的向前运动实现合成孔径。
利用天线的移动,可以将小孔径的天线虚拟成一个大孔径的天线,可以获得类似大孔径天线的探测效果• 地物对雷达发射的信号散射后会返回包含有地物信息(反射特性等)的信号• 如果雷达天线是固定不动的,则只能接受到一小部分从地物返回(后向散射)的信号• 如果雷达是快速移动的,就有可能收集到从地物后向散射到各个方向的信号,获得的信息量大为增加用一个小天线沿一直线方向不断移动,在移动中每一个位置发射一个信号,接收相应发射位置的回波信号,同时存储相位和振幅。
天线移动了一段距离L之后,存储的信号和长度为L的天线阵列所接收的信号非常相似SAR在不同位置接收同一地物的回波信号,真实孔径雷达则在一个位置上接收目标的回波SAR工作过程SAR在每一个位置都记录回波信号,针对同一地物,目标和飞行器间距离不同、相位不同、强度不同,此外还要产生多普勒效应,频率也会发生变化处理器针对不同的相位进行相移补偿(聚焦补偿,补偿不同位置之间的相位差异),再将每个位置接收的信号叠加起来,就形成了最终的合成孔径雷达信号两种天线接收信号的相似性34 1 2 SAR 多次成像分解示意图Through the moving of antenna along a line, image a scene for a number of times.通过沿着一条直线移动天线,对同一地物多次成像Synthesize the multiple imaging data of a scene to one image.把同一地物的多次成像合成为一幅图像Equivalent to “enlarge” the antenna, forming a very long antenna and thus improving the azimuth resolution.等效于增大天线,形成一根很长的天线,从而改善分辨率合成孔径大小要求实际波束宽度:实际分辨率:(合成孔径长度)合成波束宽度: 合成分辨率:dλβ=s LR L ==∆βdR L s s 22⋅==λβ2d R L s s ==∆βSAR方位向分辨率距离向分辨率与真实孔径雷达相同方位向分辨率只与真实孔径大小有关βτcos2c Rr=2d Rs=Antenna length : L=10 m Typical range : 计算合成孔径、距离向/方位向分辨率 km 85323cos /== sat H R m 25)23sin(1055.152103sin 268=⨯⨯⨯== θR r B c R Ground range resolution: km 510/056.0853000≈⨯==DR R λβAzimuth resolution:D Example: ERS-1/-2 SAR Resolution Synthetic antenna:For ERS-1/2, a 10m antenna is used to synthesize a nearly 5 km antenna.About 1000 radar images are used to get one SAR image.RAR Vs SARReal Aperture Radar Synthetic Aperture Radar (Crimea, Ukraine)5x14 km pixels 4x20 m pixelsSAR工程应用问题聚焦补偿随着平台的前进,平台和目标之间的相对位置关系会,…,X N各个位置接受到从P点回发生变化,X1,…,Xi来的信号的延迟或相位不同,需要进行补偿(聚焦处理)聚焦天线距离变化聚焦标准相干求和问题:波束的脉冲时间τ越小,距离向分辨率越高,但τ太小则发射功率下降,降低后向散射的信噪比解决方法:采用功率大的宽脉冲进行线性调频调制(啁啾, chirp)后发射,对接收的微波用具有相反频率特性的匹配滤波器(matched filter)滤波,用假设的窄脉冲宽度得到大输出即:使接收的低频微波在滤波器上有较大的延迟,使高频微波有较小的延迟,从而把接收的微波信号作为脉冲宽度很小的被压缩信号提取出来脉冲压缩(pulse compression),解线性调频调制(de-chirping)在脉冲宽度τ的时间内,通过脉冲压缩和频率∆f 调制,振幅为原来的(τ∆f )1/2倍,脉冲宽度为原来的1/(τ∆f )倍,因此,随着∆f 的提高,距离分辨率和信噪比也提高 脉冲压缩原理 距离压缩来自两个相邻目标的回波可能重叠,但重叠区中两个回波在某一时刻的频率不同,也能被分开在返回的脉冲上还会产生由多普勒效应引起的频率偏移(Doppler Shift),这种偏移等效于线性调频调制,利用这个特性,在接受端设置具有逆特性的匹配滤波器,就可以改善方位向的分辨率。
第一章微波遥感基础1、微波遥感的概念及分类微波遥感是利用某种传感器接收地面各种地物反射或散射的微波信号,藉以识别、分析地物,提取所需的信息。
主要分为主动微波遥感和被动微波遥感,被动微波遥感包括微波成像仪和微波探测仪;主动微波遥感包括雷达高度计、雷达散射计和成像雷达。
2、微波遥感的优越性(1)微波能穿透云雾、雨雪,具有全天候、全天时的工作能力,优于可见光和红外波段的探测能力(2)微波对地物有一定的穿透能力,对地物的穿透深度因波长和物质的不同而有很大差异,波长越长,穿透能力越强。
(3)微波能提供不同于可见光和红外遥感所能提供的某些信息,比如微波高度计和合成孔径雷达具有测量距离的能力,可以用于测定大地水准面,还可以利用微波探测海面风场。
(4)雷达可以进行干涉测量3、微波遥感的不足(1)微波传感器的空间分辨率要比可见光和红外传感器低(2)其特殊的成像方式使得数据处理和藉以相对困难些(3)与可见光和红外传感器数据不能在空间位置上一致4、合成孔径雷达(SAR)特性及优势(1)全天候,不受云雾雪的影响,雨的影响有限(2)全天时,主动遥感系统(3)对地表有一定的穿透能力,与土壤含水量有关,依赖于波长(4)对植被有一定的穿透能力,依赖于波长和入射角(5)高分辨率,分辨率与距离无关(6)独特的辐射和集合特性(7)干涉测量能力(8)多极化观测能力5、极化,指得是电磁波的电场振动方向的变化趋势。
极化方式有线极化、椭圆极化、圆极化。
第二章微波遥感系统1、常见的微波遥感传感器在海洋、陆地、大气微波遥感应用中,常用的有效的传感器有五种:散射计、高度计、无线电地下探测器(以上为非成像系统);微波辐射计、侧视雷达(以上为成像系统)。
2、散射计微波散射计是一种有源微波遥感器,专门用来测量各种地物的散射特性。
它是通过测量地物对微波的散射强度,达到测定地物的后向散射系数的相对值。
散射计按照观测方式可以分为以下四类:侧视观测散射计;前视(后视)观测散射计;斜视观测散射计;笔式光束环形扫描散射计。
微波遥感基础
02107035 韩倩
1.微波散射计三种实现方法是什么?原理和优缺点?
方法一,使用一个可以准确指向被测目标区域的窄波束宽度的散射计
原理:当平台搭载散射计移动时,雷达跟踪目标区域并且建立后向散射曲线
优点:提高了分辨率
方法二,利用信号多普勒效应
原理:设想一散射计,方向图沿平台飞行方向较宽,垂直于该方向很窄,方向性很强,散射波束向前倾。
在任意时刻,由于回波信号来自Δθ的波束宽度内,因此很大范围内的表面都被探测到。
那么被探测点的回波会因为多普勒变为f0+δf。
优点:探测范围广
方法三,发送很短的脉冲信号,并分析回波的时间结构
原理:设想一方向性足够强的天线,飞行器静止,他的回波
,从而对入射角度进行求解。
经过两次的传输时间为:2H
c cosθ
优点:平台或者散射计本身固定;结果与脉冲受限雷达高度计的结果分辨率的相同
2.合成孔径雷达方程与常规雷达方程的差异,这种差异能带来什么
优势?
常规雷达方程方位分别率R a≈Hλ
L cosθ
合成孔径雷达方程的方向分别率L
这种差异优势:克服了对分别率对高度的依赖,通过平台的移动代替了天线大小的增加。
3.雷达工作时序的设计步骤分为哪几步?分别需要注意什么?
4.微波图像的评价方法和指标是什么?
指标:1、距离分别率、方位分辨率、峰值旁瓣比、积分旁瓣比
2、辐射分辨率
方法:点目标二维成像的“脉冲响应函数”(IRF)
5.什么校准?什么是定标?目的是什么?
校准:内部校准(为了克服系统内部传输误差,控制幅度相位)外部校准(为了了解回波测量过程中的随机误差)
目的:建立图像灰度与地物的精确散射关系
定标:σ0=H s−1P r
Ac
⁄Hs传递函数Pr接受功率Ac分辨单元面
积
6.模拟图像生成方法有哪些?有缺点是什么?
1、逐点仿真计算(计算量大)
2、同心圆仿真计算
3、二维FFT快速计算(小场景)
4、极化仿真计算
7.为什么要进行实时回波模拟的设计?
1、雷达系统设计具有参考价值
2、 用于雷达图像的几何校正
3、 用于培训
4、 建立数据库
8、在微波遥感中,被探测目标为各向异性的导体,对微波遥感探测信息获取或目标图像信息反演会带来什么影响?
材料特性随着外加磁场的场强和方向变化,可以使目标的散射面积变小,使回波信息不准确,常常用于隐身材料。
9、假设发射电磁波工作在2.16GHz ,在 穿透无磁物质时,其电导率
和介电常数关系为 ,则电磁波穿透深度为多少 ?
电导率极小时, d p =2σ(εμ)0.5 μ=μ0 c =1√εμ w =2πf 得d=7.656m
10、当入射角和折射角分别为30 ° 和12.6 ° 时,其折射率比值为多少,该电磁波入射到分界面时,其布鲁斯特角大小是多少? n21=sinθ1/sinθ =sin30/sin12.6=2.3 θ=arctan √ε1ε2=arctan sin (折射角)sin (入射角)
=23.60 11、请分别计算出X 、L 、P 、K 波段下,按瑞利标准近似光滑表面时,其最小不同反射平面的路径差是多少?波段波长在其范围内自设。
Δφ=4πΔℎcosθ0
λ Δφ<4π
25 时光滑
L 波段 (30~15cm ) Δℎ最小是在 0.6cm
00,300σεεεω
==
X波段(3.75~2.5cm)Δℎ最小是在 0.1cm
K波段(1.67~1.11cm)Δℎ最小是在 0.0444cm P波段(0~50cm)Δℎ最小是在 2cm。