板球系统文档
- 格式:pdf
- 大小:586.17 KB
- 文档页数:9
Unux操作系统版本:AIX IBM公司开发的高级交互式执行OS,利用Power4与RS64IV之类的高端CPU BSD 伯克利版本,是Linux开放源代码的替代品HP-UX惠普公司开发,版本11i是为64位RISC和ItaniumCPU开发IRIX 是silicon Graphics公司为64位CPU开发Linux UNIX免费操作系统的克隆Solaris SUN公司为UltraSPARC CPU开发的Tru64 原名为Digital Unix,对64位CPU进行了优化UNIXWare AT&T公司的UNIX后续者,属于SCO集团NetBEUI 基于NetBIOS,是微软和IBM合作开发,不可路由,限于255台主机的网络 NetBIOS的命令有net view /net use,Samba实际是NetBIOS的Linux/unix版本连接IPX/SPX网络:需安装mars-nwe-*(使Linux主机作为Netware网络上的文件和打印机服务器) ,ipxutils-*(支持IPX/SPX),ncpfs-*(在Netware网络上作为客户机)Linux的启动1.POST,读取MBR中的启动引导器2.LILO/GRUB引导HD中的OS3.运行Linux内核,检测硬件,加载OS的init进程4.init是Linux系统中运行的第一个进程,PID=1,其他进程的父进程,init读取系统引导配置文件/etc/inittab中的信息进行初始化,及/etc/rc.d/rc.sysinit,系统初始化脚本5.根据系统的设置将启动相应的服务程序(挂载/proc文件系统,设置系统时钟,系统环境变量,初始化USB/HID,设置PNP,加载键盘映射,系统字体,系统模块,初始化RAID,简称文件系统,挂载文件系统,激活磁盘配额,激活SWAP分区,初始化串口设备,生成系统启动信息的log文件)6.启动过程最后,将运行控制台程序提示输入帐号,口令Boot: mem=XXX M 指定内存Boot: linux mediacheck 测试校验和#more /etc/grub.conf#Ls /boot/#ps –ef |head 查看pid=1的init进程Init配置文件 /etc/inittab 系统启动,正常运行中将运行哪些进程#more /etc/inittabId : runlevels : action : process惟一标识一个配置记录单个或运行级别列表哪种类型动作X: 5: respawn: /etc/x11/prefdm -nodaemonAction initdefault id: 3: initdefaultSysinit 在boot或bootwait进程前运行,runlevels被省略si:: sysinit: /etc/rc.d/rc.sysinitWait 在进入指定的运行级别后运行一次CtrlaltdelCa:: ctrlaltdel :/sbin/shutdown –t3 –r nowPowerfail powerokwait 断电恢复供电Pf:: powerfail:/sbin/shutdown –f –h+2 “powerfailure;system shutting down”Pr:12345:powerokwait:/sbin/shutdown –c “power restored;shutdown cancelled”Respawn 在结束后会重启运行,控制台程序getty#runlevel 显示系统当前和上一次运行级别#grep sysinit /etc/inittab#head /etc/rc.sysinit服务器启动脚本放在/etc/rc.d/init.d/#ls /etc/rc.d/init.d/xinetd#ls /etc/rc.d/ 各运行级别有独立的脚本目录#ls /etc/rc.d/rc3.d/#ll /etc/rc.d/rc3.d/s56 xinetd 启动服务脚本#ll /etc/rc.d/rc3.d/k96pcmcia 停止服务脚本#ls /etc/rc.d/rc0.d/#ls /etc/rc.d/rc6.d/#/etc/rc.d/init.d/xinetd#/etc/rc.d/init.d/xinetd status#/etc/rc.d/init.d/xinetd restart#service xinetd stop/startXinetd配置文件#more /etc/xinetd.conf#ls /etc/xinetd.d/#more /etc/xinetd.d/rsync#ntsysv#chkconfig –list 查看系统中服务的启动状态#chkconfig –level 设置指定服务在指定运行级别中的启动状态#chkconfig –level 24 syslog off#chkconfig rsync on#service xinetd restartGRUB是计算机启动过程中运行的第一个真正的软件(不能直接加载windows的核心文件进行引导,通过调用windows自身的启动引导器,通常为windows所在分区的引导扇区)BIOS自检后读取运行MBR中的启动引导器程序,由它加载启动硬盘分区中的OSGRUB功能:命令行交互界面支持LBA,能从1024柱面以后的分区中启动OS能访问ext2分区,ext2分区的配置文件/boot/grub/grub.conf 当boot分区的物理位置变化时,才需要重新安装grub到MBR#rpm –q grub#mount /mnt/cdrom RH9.0第一张光盘#rpm –I /mnt/cdrom/Redhat/RPMS/grub-0.93…建立/boot/grub/grub.conf按硬盘中已安装的OS进行配置,使用命令安装grub到MBRGRUB启动界面E 编辑该项下的编辑界面 b 启动当前菜单项 d 删除当前行 e 编辑选中的行 c 进入grub的命令行o 当前行后插入一行O 当前行前插入一行A 添加内核启动参数C 进入grub命令行Grub的启动菜单项编辑页面(修改只对本次启动生效)B 启动当前菜单项 d 删除当前行 e 编辑当前选中的行 esc 返回启动菜单界面C 进入Grub命令行方式 o 当前行后插入一行 O 当前行前插入一行Grub命令行界面在shell提示符下 #grub 退出 grub>quitGrub>help kernel#LL /etc/grub.conf 它是/boot/grub/grub.conf的一个符号链接#LL /boot/grub/menu.lst 是/boot/grub/grub.conf的另一个符号链接#more /boot/grub/grub.confDefault 0 从0开始Timeout 10 启动延时,为负数或不设置,则取消启动延时,手工选择启动选项Splashimge (hd0,0) /boot/grub/splash.xpm.gz 图像格式的压缩Tittle Redhat Linux (2.4.20-8)Root (hd0,0) 设置Grub的根设备为Linux内核所在的分区 Kernel /boot/vmlinuz-2.4.20-8 ro root=LABEL=\ 加载内核文件Initrd /boot/initrd-2.4.20-8.img 加载镜像文件Tittle win2kpMap (hd0)(hd1) 使用map交换磁盘/分区在Bios中的标志符,启动第二个硬盘中的WindowsMap (hd1)(hd0)Root (hd1,0) 设置真实的Windows分区为Grub的根设备Chainloader +1 调用Windows分区的启动引导器引导Windows系统Makeactive 设置根设备为活动分区Grub的安全设置:针对启动菜单设置全局口令针对某菜单项使用全局口令针对某菜单项设置独立口令在/boot/grub/grub.conf的全局配置部分使用Password 123451、使用lock锁定菜单项,设定某启动菜单项使用全局口令锁定,无参数,在tittle 下使用Password 12345 只许选择菜单项启动,如需编辑菜单,先解锁Tittle Redhat Linux(2.4.20-8)LockRoot(0,0)Kernel /boot/vmlinuz-2.4.20-8 ro root=LABEL=XInitrd /boot/initrd-2.4.20-8.img在各菜单项中使用独立的password设置解锁口令,实现全局口令与菜单口令的分级管理Password 12345Tittle Redhat Linux(2.4.20-8)Password 67890Root(0,0)…使用MD5加密口令获得方式 grub自带的grub-md5-crypt 在grub交互命令行界面使用md5crypt命令,也是调用上述命令#LL /boot/grub/grub.conf#grub-md5-crypt#grubGrub>md5crypt#vi /boot/grub/grub.conf配置GRUB重复上次启动项:Default saved 指定默认启动项为上次保存值Timeout 10Title Red Hat linux (2.4.20-8)Root (hd0,0)Kernel /boot/vmlinuzInitrd /boot/initrd-2.4.20-8Savedefault 保存当前启动项为默认启动项Title win2kpMap (hd0)(hd1)Map (hd1)(hd0)Root(hd1,0)Chainloader +1Savedefault 保存当前启动项为默认启动项制作GRUB启动盘:#mke2fs /dev/fd0#mount /mnt/floppy#ll /mnt/floppy#grub –install __root__directory=/mnt/floppy/`(fd0)`#ll /mnt/flopyy /boot/grub/#umount /mnt/floppy#reboot使用GRUB启动盘恢复被覆盖的硬盘引导系统从GRUB软盘引导系统Grub>rootGrub>find /boot/grub/grub.conf (hd0,0) grub>root(hd0,0)Grub>setup(hd0) 安装GRUB到hd0,即重写(hd0)的MBRGRUB命令:1、菜单命令:只用于配置文件的全局部分,在配置文件中应放在其他命令之前 Default 设置默认的启动菜单项Fallback 启动某菜单项失败后返回的菜单项Hiddenmenu 隐藏菜单界面Timeout 自动启动延时Title 开始一个菜单项2、常规命令:用于配置文件和GRUB命令行交互界面Bootp 通过Bootp初始化网络设备Color 设置菜单界面颜色Device 指定设备文件作为驱动器Dhcp 通过DHCP初始化网络设备Hide 隐藏某分区Ifconfig 手工配制网络设备Pager 改变内部页程序状态Partnew 新建一个主分区Parttype 改变分区类型Password 为菜单界面设置口令Rarp 通过RARP初始化网络设备Serial 设置串口设备Setkey 设置键盘映射Splashimage GRUB启动背景图形文件Terminal 选择终端类型Tftpserver 指定TFTP ServerUnhide 还原隐藏分区命令行和菜单项命令:Blocklist 显示某文件所在的分区位置Boot 启动OSCat 显示文件内容Chainoloader 把启动控制权交给另外的启动引导器 Cmp 比较两个文件Configfile 加载已存在的GRUB配置文件Debug 设置为Debug模式Display apm 显示APM BIOS信息Display mem 显示内存配置Embed 嵌入stage 1.5文件Find 查找包含某文件的所有设备Fstest 测试文件系统Geometry 显示某驱动器的物理信息Halt 软件关机Help GRUB命令的帮助信息Impsprobe 查询对象多处理器信息Initrd 加载initrd文件Install 安装GRUB文件Ioprobe 查询某驱动器的I/O端口Kernel 引导OS内核Lock 锁定某GRUB引导菜单项,输入密码后才能启动 Makeactive 激活某主分区Map 虚拟映射某驱动器Md5crypt 使用MD5算法加密口令Module 加载模块Module nounzip 加载模块,不解压Pause 暂停并等待按键Quit 退出GRUBReboot 重启Read 读取内存中的内容Root 设置GRUB的root设备Rootnoverify 设置GRUB的root设备,但不装载文件系统Savedefault 保存当前的启动菜单项为默认启动Setup 自动安装GRUBTestload 从文件系统中测试读取某文件Testvbe 测试VESA BIOS EXTENSIONUppermem 强制设置主机上位内存大小Vebprobe 查询VESA BIOS EXTENSION信息Linux帮助文档:help自身也是BASH所提供的内部命令#help umask#help help#help –s set 只显示被查询命令的简短语法描述#man motd 获得命令帮助,配置文件,设备文件,协议#man man 手册页,通常包括name description files see also Man 1 普通用户的可执行命令手册Man 2 系统调用手册,内核函数的说明Man 3 子程序手册,库函数说明Man 4 系统设备手册,/dev目录中设备文件的参考说明Man 5 配置文件格式手册,多为/etc目录下各种配置文件的格式描述Man 6 游戏和趣味小程序的说明手册Man 7 协议转换手册Man 8 系统管理手册,只有root用户可执行Man 9 Linux系统例程手册#ls –d /usr/share/man/man?#ls /usr/share/man/man4#man 4 info#man 1 passwd#man 5 passwdTexinfo 比手册页更强的交互性(用info,pinfo查看)#ls /usr/share/info/#info bash#pinfo bash从软件包的项目文档中获得帮助#ls /usr/share/doc#ls /usr/share/doc/gzip-1.3.31/morecat /proc/filesystems 查看挂载对象的文件系统类型Cat /proc/meminfo 查看内存信息fdformat:格式化软盘fdiskmkfsmkswapquotaon/quotaoffswapon/swapoffdmesg/mesg/freeuname/uptime/datawho/whoami/last/su/cal/writeWebmin管理工具:1.属开源软件,采用B/S结构,服务器端运行受管理的Unix主机,客户端使用Web浏览器登录到Webmin服务器2.Webmin界面管理与平台无关性,使用Perl语言编写并解释执行,与硬件、系统无关,不需重编译(.rpm .tar .gz)对文本处理功能大,把从客户界面接收的输入转化为服务器端的命令来执行,对操纵者是透明的3.Webmin中每个管理功能使一个模块,按功能不同所有模块被划分在不同的类别目录中(Webmin System Server Networking Hardware Cluster Others)4.多账号支持,可为每个用户单独建立账号,不同的用户账号可以授权管理不同的模块,实现权限的分级管理,Webmin中使用的账号与Linux系统账号相独立Webmin安装后,只有Root用户有权建立新的Webmin账号并赋予管理模块的权限下载地址:/webadmin安装:#rpm -ivh webmin-1.080-1.noarch.rpm (root linux中的root密码登录) #service webmin status 查询服务当前状态#chkconfig __list webmin 服务在各运行级的启动停止状态登录:使用web浏览器登录到webmin服务器 http://192.168.1.19:10000/对于.tar.gz包,可解压到指定目录后,运行./setup.pl执行安装Webmin目录分类:1.Webmin目录页:对webmin自身管理而设置(webmin configuration)2.System目录页:与Unix系统管理有关3.Servers目录页:网络服务器配置Apache webserver web服务Webalizer logfile analysis apache日志分析Bind DNS Server 域名服务WU-FTP Server FTP服务ProFTPD serverSendmail configurationPostfix configurationQmail configurationFetchmail mail retrievalPromail mail filterMajordomo list managerMysql database serverPostgresql database serverDHCP serverSquid proxy server 网页代理服务器Samba windows file sharingSsh server 安全的远程登录Jabber im server 即时消息服务器4.Networking目录页与网络连接相关的功能ADSL client rp-pppoe拨号程序的配置Extended internet services Xineted超级服务器配置Linux firewall iptables防火墙的配置NFS exportsNIS client and server NIs网络信息系统服务器与客户端配置Network configurationPPP dialin server PPP拨号接入服务器配置SSL tunnels SSL安全加密隧道配置Shorewall firewall shorewall防火墙配置5.Hardware目录页:6.Cluster 对安装Webmin的多台主机实现统一管理,安装软件包,建立用户帐号7.Others 客户端的工具程序修改Webmin用户口令,用changepass.pl,能设置独立于系统帐号的用户口令Changepass.pl <webmin配置文件所在目录> <用户登录名> <新用户口令> changepass.pl命令位于目录 /usr/libexec/webmin中#/usr/libexec/webmin/changepass.pl Webmin配置文件目录为 /etc/webmin#/usr/libexec/webmin/changepass.pl /etc/webmin/root mypass 设置root用户的新口令为mypassVNC远程控制程序:在本地系统上显示远程计算机整个桌面的轻量型协议,具有跨平台性(在Windows 下看到Unix,在MAC OS下看到Windows),下载地址:/vnc (VNC 以C/S结构运行)1.VNC Server:Unix(VNC) Windows(Winvnc) Macintosh(macVNC)2.VNC viewers VNC Viewres (X.windows Java Macintosh Windows CE)在第三张光盘的/Redhat/RPMS/下有3个文件VNC-server-3.3.2r2-47.i386.rpm VNC Servers安装包VNC-3.3.2r2-47.i386.rpm VNC viewer安装包VNC-doc-3.3.3r2-47.i386.rpm VNC文档#mount /mnt/cdrom#cd /mnt/cdrom/Redhat/RPMS/#rpm –ivh vnc-server #rpm -ev vnc-server#rpm –ivh vnc-3.3.3r2 #rpm -ev vnc#rpm –ivh vnc-doc #rpm -ev vnc-doc (删除软件包名,非安装文件全名)#rpm -qa|grep vnc启动VNC服务器:1.查看VNC服务器软件包中的内容#rpm –ql vnc-server |grep bin2.VNC服务器中的命令VNCserver VNC服务器的启动脚本XVNC 真正的VNC服务器程序VNCpasswd VNC服务器口令设置VNCconnect 从VNC服务器向监听模式客户机发起连接3.启动VNC服务器不同用户可以分别启动自己的VNC服务器#VNCserver 设密码#ps -ef |grep vnc 查看已启动的VNC服务器进程VNC客户机连接VNC服务器1.在Linux的X-Windows的终端下输入 VNCviewer,在对话框中输入要连接到的VNC服务器的IP和显示端口号2.Windows下的VNC客户机连接VNC服务器下载并安装WinVNC,启动VNC查看器程序VNCviewer.exe,输入远程Linux VNC服务器的IP,显示端口号,输入验证码3.使用浏览器连接VNC服务器通过支持Java虚拟机的浏览器作为客户端连接到VNC服务器进行远程控制,在IE地址栏输入VNC服务器的IP:5801(它是VNC服务器使用http协议监听的端口号)#ps -ef |grep vnc 查看当前已运行的VNC服务器的进程#vncserver –-kill:1 停止VNC服务器进程#VNCpasswd#ls ~/.vnc/passwd 查看保存VNC服务器密码的文件VNC定制:1.使用同一个帐号启动多个VNC服务器,第一个启动的VNC服务器占用的显示端口号为:1之后递延#ps -ef|grep vnc #Vncserver #Vncserver #ps -ef|grep Vnc2.使用不同的帐号启动VNC服务器,VNC客户机连接到该显示端口的VNC服务器所看到的是启动该服务器的用户的桌面环境#Vncserver 如已建立帐号user1,并已设置好VNC服务器密码#su – user1$Vncserver$ps -ef|grep vnc$vncserver –kill:1 错误提示,用户只能停止自己启动的VNC服务器进程$exit#vncserver –kill:2 错误提示,root用户也不能停止其他用户启动的VNC服务器进程,但root可用Kill命令停止任何进程(Xvnc)3.指定未占用显示端口号启动VNC服务器#vncserver :3 #vncserver :6 #ps -ef|grep VNC4.设置VNC的分辨率#vncserver –-geometry 800X6005.设置VNC服务器对客户机有更稳定的连接当多个客户机连接同一个VNC服务器端口时,Vnc服务器将断开旧的连接为新的连接服务,通过-dontdisconnect参数改变默认设置#VNCserver#VNCserver -dontdisconnect6.设置VNC服务器的同一个显示端口可连接多个客户机(简单的视频会议)#vncserver –alwaysshared (允许所有客户机共享接入)VNC客户机常用设置1.使用VNCviewer连接VNC服务器 vncviewer host:display# (在图形环境下执行) #vncserver #vncviewer IP:display号2.VNCviewer –fullscreen 192.168.1.10:1 全屏显示-viewonly 以查看方式运行,键鼠无法输入VNC反向连接(服务器向客户机发起连接)通常客户机向服务器发出请求建立连接,服务器处于监听状态1.启动VNC客户机 VNCviewer -listen2.启动VNC服务器 Vncserver3.在VNC服务器端执行 Vncconnect #Vncconnect -display:1 192.168.1.10远程登录管理:Secure Shell采用密文传输数据,远程登录管理 SSH/Telnet 实现字符界面的远程登录管理OpenSSH最早用于OpenBSD 可运行于多数Unix和发行版的Linux,下载地址:/zh-cn/index.html 在RH9Linux中Openssh是默认安装的#rpm –qa |grep ssh 安装软件包位于第一张光盘Openssh-3.5pl-6 (核心) Openssh-server-3.5pl-6 Openssh-client-3.5#rpm –ivh /mnt/cdrom/Redhat/RPMS/Openssh 3.5pl-6-i386.rpm#rpm –ivh /Openssh-server-3.5pl-6#rpm –ivh /Openssh-client-3.5Openssh 服务器的配置#rpm –ql Openssh-server 查看Openssh-server中的文件(服务器程序,配置文件)#more /etc/ssh/sshd-config 查看Openssh服务器的配置文件,保持默认#more sshd-configOpenSSH服务器的启动与停止:启动脚本为SSHD#service sshd status#service sshd start/stop#chkconfig __level 35 sshd on#ls /etc/rc3.d|grep sshd使用Openssh客户端连接SSH服务器所连接的SSH服务器不一定是Linux主机中的OpenSSH服务器,只要是标准的SSH服务器都可使用OpenSSH客户端进行连接#rpm –ql openssh-clients1.openssh客户端配置文件(系统配置文件:系统中所有用户的默认SSH客户端配置;用户配置文件:自定义用户的SSH客户端配置)#more /etc/ssh/ssh-config 查看OpenSSH客户端系统配置文件内容OpenSSH服务器配置文件/etc/ssh/sshd_configOpenSSH客户端系统配置文件/etc/ssh/ssh_configOpenSSH客户端用户配置文件$home/.ssh/config使用SSH命令登录SSH服务器#ssh root@192.168.1.19 第一次用该主机登录需确认密钥,正确登录后出现“#”#scp root@192.168.1.19 :/etc/passwd 把一台主机上的文件copy到另一台主机使用sftp命令下载文件,用于从服务器下载文件,在sftp交互命令中兼容了ftp的大多命令#sftp root@192.168.1.19Sftp> ? 使用sftp命令登录的服务器主机需运行Openssh服务器,要使用sftp-server需要在Openssh服务器的配置文件sshd_config中加载sftp-server子系统#rpm –ql openssh-server |grep sftp/usr/libexec/openssh/sftp-server/usr/share/man/man8/sftp-server.8.gz#grep sftp /etc/ssh/sshd-configSubsystem sftp /usr/libexec/openssh/sftp-serverWindows下的SSH客户端(Windows下使用SSH客户端软件对Linux主机操作)Putty是WindowsOS下运行的SSH客户端软件,无需安装,可放置在任何路径下运行下载:/~sgtatham/putty/download.html组件:putty.hlpPutty.exe 主程序,SSH客户端程序,使用它进行SSH登录,在Windows下运行 Pscp.exe SCPPsftp.exe SftpCuteFTP是Windows下FTP图形客户端的软件1.Webmin中设置OpenSSH服务器在Servers选项中“SSH server” /etc/ssh/sshd_config2.Webmin中设置SSH客户端,基于浏览器 Others项中“SSH/telnet login”Telnet服务器(第3张光盘)受Xinetd程序控制#mount /mnt/cdrom#rpm –ivh /mnt/cdrom/RedHat/RPMS/telnet-server-0.17-25.i386.rpm #umount /mnt/cdrom#rpm –ql telnet-server启动 #more /etc/xinetd.d/telnet#chkconfig telnet on#grep disable /etc/xinetd.d/telnet#service xinetd start在Windows下 C:\>telnet 192.168.1.9(注:本资料素材和资料部分来自网络,仅供参考。
球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
Package‘odin’October2,2023Title ODE Generation and IntegrationVersion1.2.5Description Generate systems of ordinary differential equations (ODE)and integrate them,using a domain specific language(DSL).The DSL uses R's syntax,but compiles to C in order toefficiently solve the system.A solver is not provided,butinstead interfaces to the packages'deSolve'and'dde'aregenerated.With these,while solving the differential equations,no allocations are done and the calculations remain entirely incompiled code.Alternatively,a model can be transpiled to R for use in contexts where a C compiler is not present.Aftercompilation,models can be inspected to return information about parameters and outputs,or intermediate values after calculations.'odin'is not targeted at any particular domain and is suitablefor any system that can be expressed primarily as mathematicalexpressions.Additional support is provided for working withdelays(delay differential equations,DDE),using interpolatedfunctions during interpolation,and for integrating quantitiesthat represent arrays.License MIT+file LICENSEURL https:///mrc-ide/odinBugReports https:///mrc-ide/odin/issues Imports R6,cinterpolate(>=1.0.0),deSolve,digest,glue,jsonlite, ring,withrSuggests dde(>=1.0.0),jsonvalidate(>=1.1.0),knitr,mockery, pkgbuild,pkgload,rlang,rmarkdown,testthat VignetteBuilder knitrRoxygenNote7.1.1Encoding UTF-8Language en-GBNeedsCompilation no12can_compile Author Rich FitzJohn[aut,cre],Thibaut Jombart[ctb],Imperial College of Science,Technology and Medicine[cph]Maintainer Rich FitzJohn<***********************>Repository CRANDate/Publication2023-10-0213:40:11UTCR topics documented:can_compile (2)odin (3)odin_build (5)odin_ir (6)odin_ir_deserialise (7)odin_options (7)odin_package (9)odin_parse (10)odin_validate (11)Index13 can_compile Test if compilation is possibleDescriptionTest if compilation appears possible.This is used in some examples,and tries compiling a trivial C program with pkgbuild.Results are cached between runs within a session so this should be fast to rely on.Usagecan_compile(verbose=FALSE,refresh=FALSE)Argumentsverbose Be verbose when running commands?refresh Try again to compile,skipping the cached value?DetailsWe use pkgbuild in order to build packages,and it includes a set of heuristics to locate and organise your C compiler.The most likely people affected here are Windows users;if you get this ensure that you have rtools ing pkgbuild::find_rtools()with debug=TRUE may be helpful for diagnosing compiler issues.odin3ValueA logical scalarExamplescan_compile()#will take~0.1s the first timecan_compile()#should be basically instantaneousodin Create an odin modelDescriptionCreate an odin model from afile,text string(s)or expression.The odin_version is a"standard evaluation"escape hatch.Usageodin(x,verbose=NULL,target=NULL,workdir=NULL,validate=NULL,pretty=NULL,skip_cache=NULL,compiler_warnings=NULL,no_check_unused_equations=NULL,options=NULL)odin_(x,verbose=NULL,target=NULL,workdir=NULL,validate=NULL,pretty=NULL,skip_cache=NULL,compiler_warnings=NULL,no_check_unused_equations=NULL,options=NULL)Argumentsx Either the name of afile to read,a text string(if length is greater than1elements will be joined with newlines)or an expression.verbose Logical scalar indicating if the compilation should be verbose.Defaults to the value of the option odin.verbose or FALSE otherwise.target Compilation target.Options are"c"and"r",defaulting to the option odin.target or"c"otherwise.workdir Directory to use for any generatedfiles.This is only relevant for the"c"target.Defaults to the value of the option odin.workdir or tempdir()otherwise.validate Validate the model’s intermediate representation against the included schema.Normally this is not needed and is intended primarily for development use.De-faults to the value of the option odin.validate or FALSE otherwise.pretty Pretty-print the model’s intermediate representation.Normally this is not needed and is intended primarily for development use.Defaults to the value of theoption odin.pretty or FALSE otherwise.skip_cache Skip odin’s cache.This might be useful if the model appears not to compile when you would expect it to.Hopefully this will not be needed often.Defaultsto the option odin.skip_cache or FALSE otherwise.4odin compiler_warningsPreviously this attempted detection of compiler warnings(with some degree ofsuccess),but is currently ignored.This may become supported again in a futureversion depending on underlying support in pkgbuild.no_check_unused_equationsIf TRUE,then don’t print messages about unused variables.Defaults to the optionodin.no_check_unused_equations or FALSE otherwise.options Named list of options.If provided,then all other options are ignored.DetailsDo not use odin::odin in a package;you almost certainly want to use odin_package instead.A generated model can return information about itself;odin_irValueAn odin_generator object(an R6class)which can be used to create model instances.User parametersIf the model accepts user parameters,then the parameter to the constructor or the$set_user() method can be used to control the behaviour when unknown user actions are passed into the model.Possible values are the strings stop(throw an error),warning(issue a warning but keep go-ing),message(print a message and keep going)or ignore(do nothing).Defaults to the option odin.unused_user_action,or warning otherwise.Delay equations with ddeWhen generating a model one must chose between using the dde package to solve the system or the default deSolve.Future versions may allow this to switch when using run,but for now this requires tweaking the generated code to a point where one must decide at generation.dde implements only the Dormand-Prince5th order dense output solver,with a delay equation solver that may perform better than the solvers in deSolve.For non-delay equations,deSolve is very likely to outperform the simple solver implemented.Author(s)Rich FitzJohnExamples##Compile the model;exp_decay here is an R6ClassGenerator and will##generate instances of a model of exponential decay:exp_decay<-odin::odin({deriv(y)<--0.5*yinitial(y)<-1},target="r")##Generate an instance;there are no parameters here so all instances##are the same and this looks a bit pointless.But this step isodin_build5 ##required because in general you don t want to have to compile the##model every time it is used(so the generator will go in a##package).mod<-exp_decay$new()##Run the model for a series of times from0to10:t<-seq(0,10,length.out=101)y<-mod$run(t)plot(y,xlab="Time",ylab="y",main="",las=1)odin_build Build an odin model generator from its IRDescriptionBuild an odin model generator from its intermediate representation,as generated by odin_parse.This function is for advanced use.Usageodin_build(x,options=NULL)Argumentsx An odin ir(json)object or output from odin_validate.options Options to pass to the build stage(see odin_optionsDetailsIn applications that want to inspect the intermediate representation rather before compiling,ratherthan directly using odin,use either odin_parse or odin_validate and then pass the result to odin::odin_build.The return value of this function includes information about how long the compilation took,if itwas successful,etc,in the same style as odin_validate:success Logical,indicating if compilation was successfulelapsed Time taken to compile the model,as a proc_time object,as returned by proc.time.output Any output produced when compiling the model(only present if compiling to C,and if the cache was not hit.model The model itself,as an odin_generator object,as returned by odin.ir The intermediate representation.error Any error thrown during compilationSee Alsoodin_parse,which creates intermediate representations used by this function.6odin_irExamples#Parse a model of exponential decayir<-odin::odin_parse({deriv(y)<--0.5*yinitial(y)<-1})#Compile the model:options<-odin::odin_options(target="r")res<-odin::odin_build(ir,options)#All results:res#The model:mod<-res$model$new()mod$run(0:10)odin_ir Return detailed information about an odin modelDescriptionReturn detailed information about an odin model.This is the mechanism through which coef works with odin.Usageodin_ir(x,parsed=FALSE)Argumentsx An odin_generator function,as created by odin::odinparsed Logical,indicating if the representation should be parsed and converted into an R object.If FALSE we return a json string.WarningThe returned data is subject to change for a few versions while I work out how we’ll use it. Examplesexp_decay<-odin::odin({deriv(y)<--0.5*yinitial(y)<-1},target="r")odin::odin_ir(exp_decay)coef(exp_decay)odin_ir_deserialise7 odin_ir_deserialise Deserialise odin’s IRDescriptionDeserialise odin’s intermediate model representation from a json string into an R object.Unlike the json,there is no schema for this representation.This function provides access to the same deserialisation that odin uses internally so may be useful in applications.Usageodin_ir_deserialise(x)Argumentsx An intermediate representation as a json stringValueA named listSee Alsoodin_parseExamples#Parse a model of exponential decayir<-odin::odin_parse({deriv(y)<--0.5*yinitial(y)<-1})#Convert the representation to an R objectodin::odin_ir_deserialise(ir)odin_options Odin optionsDescriptionFor lower-level odin functions odin_parse,odin_validate we only accept a list of options rather than individually named options.8odin_options Usageodin_options(verbose=NULL,target=NULL,workdir=NULL,validate=NULL,pretty=NULL,skip_cache=NULL,compiler_warnings=NULL,no_check_unused_equations=NULL,rewrite_dims=NULL,rewrite_constants=NULL,substitutions=NULL,options=NULL)Argumentsverbose Logical scalar indicating if the compilation should be verbose.Defaults to the value of the option odin.verbose or FALSE otherwise.target Compilation target.Options are"c"and"r",defaulting to the option odin.target or"c"otherwise.workdir Directory to use for any generatedfiles.This is only relevant for the"c"target.Defaults to the value of the option odin.workdir or tempdir()otherwise.validate Validate the model’s intermediate representation against the included schema.Normally this is not needed and is intended primarily for development use.De-faults to the value of the option odin.validate or FALSE otherwise.pretty Pretty-print the model’s intermediate representation.Normally this is not needed and is intended primarily for development use.Defaults to the value of theoption odin.pretty or FALSE otherwise.skip_cache Skip odin’s cache.This might be useful if the model appears not to compile when you would expect it to.Hopefully this will not be needed often.Defaultsto the option odin.skip_cache or FALSE otherwise.compiler_warningsPreviously this attempted detection of compiler warnings(with some degree ofsuccess),but is currently ignored.This may become supported again in a futureversion depending on underlying support in pkgbuild.no_check_unused_equationsIf TRUE,then don’t print messages about unused variables.Defaults to the optionodin.no_check_unused_equations or FALSE otherwise.rewrite_dims Logical,indicating if odin should try and rewrite your model dimensions(if us-ing arrays).If TRUE then we replace dimensions known at compile-time withliteral integers,and those known at initialisation with simplified and shared ex-pressions.You may get less-comprehensible error messages with this optionset to TRUE because parts of the model have been effectively evaluated duringprocessing.rewrite_constantsLogical,indicating if odin should try and rewrite all constant scalars.This is asuperset of rewrite_dims and may be slow for large models.Doing this willmake your model less debuggable;error messages will reference expressionsthat have been extensively rewritten,some variables will have been removedentirely or merged with other identical expressions,and the generated code maynot be obviously connected to the original code.odin_package9 substitutions Optionally,a list of values to substitute into model specification as constants, even though they are declared as user().This will be most useful in conjunctionwith rewrite_dims to create a copy of your model with dimensions known atcompile time and all loops using literal integers.options Named list of options.If provided,then all other options are ignored.ValueA list of parameters,of class odin_optionsExamplesodin_options()odin_package Create odin model in a packageDescriptionCreate an odin model within an existing package.Usageodin_package(path_package)Argumentspath_package Path to the package root(the directory that contains DESCRIPTION)DetailsI am resisting the urge to actually create the package here.There are better options than I cancome up with;for example devtools::create,pkgkitten::kitten,mason::mason,or creating DESCRIPTIONfiles using desc.What is required here is that your package:•Lists odin in Imports:•Includes useDynLib(<your package name>)in NAMESPACE(possibly via a roxygen comment @useDynLib<your package name>•To avoid a NOTE in R CMD check,import something from odin in your namespace(e.g., importFrom("odin","odin")s or roxygen@importFrom(odin,odin)Point this function at the package root(the directory containing DESCRIPTION and it will write outfiles src/odin.c and odin.R.Thesefiles will be overwritten without warning by running this again.10odin_parseExamplespath<-tempfile()dir.create(path)src<-system.file("examples/package",package="odin",mustWork=TRUE)file.copy(src,path,recursive=TRUE)pkg<-file.path(path,"package")#The package is minimal:dir(pkg)#But contains odin files in inst/odindir(file.path(pkg,"inst/odin"))#Compile the odin code in the packageodin::odin_package(pkg)#Which creates the rest of the package structuredir(pkg)dir(file.path(pkg,"R"))dir(file.path(pkg,"src"))odin_parse Parse an odin modelDescriptionParse an odin model,returning an intermediate representation.The odin_parse_version is a"stan-dard evaluation"escape hatch.Usageodin_parse(x,type=NULL,options=NULL)odin_parse_(x,options=NULL,type=NULL)Argumentsx An expression,character vector orfilename with the odin codetype An optional string indicating the the type of input-must be one of expression, file or text if provided.This skips the type detection code used by odin andmakes validating user input easier.options odin options;see odin_options.The primary options that affect the parse stage are validate and pretty.DetailsA schema for the intermediate representation is available in the package as schema.json.It issubject to change at this point.See Alsoodin_validate,which wraps this function where parsing might fail,and odin_build for building odin models from an intermediate representation.Examples#Parse a model of exponential decayir<-odin::odin_parse({deriv(y)<--0.5*yinitial(y)<-1})#This is odin s intermediate representation of the modelir#If parsing odin models programmatically,it is better to use#odin_parse_;construct the model as a string,from a file,or as a#quoted expression:code<-quote({deriv(y)<--0.5*yinitial(y)<-1})odin::odin_parse_(code)odin_validate Validate an odin modelDescriptionValidate an odin model.This function is closer to odin_parse_than odin_parse because it does not do any quoting of the code.It is primarily intended for use within other applications.Usageodin_validate(x,type=NULL,options=NULL)Argumentsx An expression,character vector orfilename with the odin codetype An optional string indicating the the type of input-must be one of expression, file or text if provided.This skips the type detection code used by odin andmakes validating user input easier.options odin options;see odin_options.The primary options that affect the parse stage are validate and pretty.Detailsodin_validate will always return a list with the same elements:success A boolean,TRUE if validation was successfulresult The intermediate representation,as returned by odin_parse_,if the validation was success-ful,otherwise NULLerror An error object if the validation was unsuccessful,otherwise NULL.This may be a classed odin error,in which case it will contain source location information-see the examples for details.messages A list of messages,if the validation returned any.At present this is only non-fatal infor-mation about unused variables.Author(s)Rich FitzJohnExamples#A successful validation:odin::odin_validate(c("deriv(x)<-1","initial(x)<-1"))#A complete failure:odin::odin_validate("")#A more interesting failurecode<-c("deriv(x)<-a","initial(x)<-1")res<-odin::odin_validate(code)res#The object res$error is an odin_error object:res$error#It contains information that might be used to display to a#user information about the error:unclass(res$error)#Notes are raised in a similar way:code<-c("deriv(x)<-1","initial(x)<-1","a<-1")res<-odin::odin_validate(code)res$messages[[1]]Indexcan_compile,2coef,6odin,3,5odin_(odin),3odin_build,5,11odin_ir,4,6odin_ir_deserialise,7odin_options,5,7,10,11odin_package,4,9odin_parse,5,7,10,11odin_parse_,11,12odin_parse_(odin_parse),10odin_validate,5,7,11,11pkgbuild::find_rtools(),2proc.time,5tempdir(),3,813。
游戏系统文档模板篇一:游戏设计模板文档名称v0.1文档规范说明:1)蓝色字体表示最近一次修改或新增内容;2)红色字体表示需要关注的内容(例如规则中需要注意的关键词等);3)灰色字体表示暂时确定不做的内容,但不排除后续版本制作,因此不删除作为留档; 4)斜体字加粗表示有争议的内容,暂时先不做; 5)文档中必须要有流程说明、UI表现、关联模块的说明; 6)引用的数据表,必须增加超链接。
版本号说明:1)版本号初始为v01,每更新一次,版本号数字递增一次。
例如:第二次修改的版本号为v02目录1.戏世界观32..................................................... ...................................................... . (3)2.1. 设计目的 ................................................... ...................................................... ...................... 3 2.1.1. 为什么需要有这些设计 ................................................... (3)2.1.2. 系统之间的关联性 ................................................... ...................................................... ....... 3 2.1.3. 设计原则 ................................................... ...................................................... .......................... 3 2.2. 期望玩家效果 ................................................... ...................................................... ............. 3 2.2.1. 此设计带给玩家的感受 ................................................... (3)2.2.2. 对玩家的吸引点 ................................................... ...................................................... ............ 3 2.2.3. 期望玩法策略 ................................................... ...................................................... ................ 3 2.3. 流程简述 ................................................... ...................................................... ...................... 3 2.4. 设计重点 ................................................... ...................................................... ...................... 3 2.5. 待定设计 ................................................... ...................................................... ...................... 3 2.6. 参考设计 ................................................... ...................................................... ...................... 4 2.7. 功能玩法简述 ................................................... ...................................................... . (4)3.范(文档完成并上传时可删除此部分内容) ................................................. (4)3.1. 文本规范 ................................................... ...................................................... . (4)4..................................................... ...................................................... (4)4.1. 相关定义 ................................................... ...................................................... ...................... 4 4.2. 流程说明 ................................................... ...................................................... ...................... 4 4.3. 玩法规则 ................................................... ............................................................................ 4 4.3.1. 玩法包装 ................................................... ...................................................... .......................... 4 4.3.2. 关卡/活动地图 ................................................... ...................................................... .............. 5 4.3.3. 副本玩法 ................................................... ...................................................... .......................... 5 4.3.4. 活动流程 ................................................... ...................................................... .......................... 5 4.3.5. 注意事项 ................................................... ...................................................... .......................... 6 4.4. 操作规则 ................................................... ...................................................... ...................... 6 4.5. UI表现 ................................................... ...................................................... ......................... 6 4.6. 关联模块 ................................................... ...................................................... . (6)5.规则.................................................... ...................................................... ................ 66.术需求.......................................................................................................... ................ 6 7.乐音效需求71. 游戏世界观[叙述游戏世界观、整体规划]2. 功能概况2.1. 设计目的2.1.1. 为什么需要有这些设计[文档设计目的,突出重点,深入思考后得出结论]2.1.2. 系统之间的关联性[依赖于哪些系统,被哪些系统所依赖,这些系统间具体的影响关系]2.1.3. 设计原则[为达到设计目的,需要遵循哪些原则,注意哪些问题,列举可以考虑到的因素]2.2. 期望玩家效果2.2.1. 此设计带给玩家的感受[玩家在参与过程中的心理感受,期望带给玩家的效果]2.2.2. 对玩家的吸引点[玩家在游戏中切实体会到的游戏亮点,以及玩家能够被设计吸引的理由]2.2.3. 期望玩法策略[设计期望玩家如何进行游戏,优势策略分析]2.3. 流程简述[若为底层基础功能,则可在此附上流程图;若是游戏内的活动,则需简洁地分条列出游戏名称,参与条件,活动范围,活动时间,活动内容,活动奖励等基础信息]2.4. 设计重点[该设计内容的重点,可以用关键词表现,按照设计者认为的优先级和重要程度排序,高的在前,低的在后]2.5. 待定设计[设计者认为容易引起争执的内容,或自己无法确定结论的部分][设计者的奇思妙想,灵光一闪,只要与此设计相关的内容皆可列于此处,要求言简意赅,能够给人以启发性]2.6. 参考设计[分析其它游戏相关设计的优缺点,作为设计参考]2.7. 功能玩法简述[以功能点为主,在此列举设计实现的功能,框架,重点规划等]3. 规范(文档完成并上传时可删除此部分内容)3.1. 文本规范为统一文档格式,规定文档中出现的某些内容需要以特殊格式书写,内容如下: ? 字体:宋体,英文字符使用Arial ? 大小:五号 ? 黑色:正文内容绿色:说明,注释内容//示例可见此 ? 黑底黄字:函数,计算公式? 蓝色:参数,变量红色:特殊规则,特别需要注意的内容 ? 橘黄色:NPC对话,系统提示,邮件内容等定义命名提示效果显示位置系统提示显示文本信息游戏窗口中上部对话提示需要玩家点击继续 NPC对话窗口灰底:暂时不进行实现或者以后再考虑的内容黄底:具体字色仍遵循以上规则,仅将底色标为黄色,表示最近一次修改的内容,注意修改时需清除上一次的修改记录//若有需要具体定义文字颜色的文档内容,则可不遵循以上规则4. 正文4.1. 相关定义[功能涉及到的名词解释,一些基本规则的简单说明]4.2. 流程说明[若功能涉及到玩法或操作的判断流程,则可在此用文字或流程图列出]4.3. 玩法规则4.3.1. 玩法包装[该活动/玩法的剧情包装,需符合游戏世界观]4.3.2. 关卡/活动地图[]地图说明:AC点为BOSS坐标等等,地图分为4个区左上角为第一区区内的具体设计等…… ? 右上角为第二区区内的具体设计等…… ? 以此类推……4.3.3. 副本玩法限时杀怪夺旗保护NPC 护送其它等等……4.3.4. 活动流程活动开始参与条件:填写本活动的参加条件是什么活动范围:填写本活动的范围,例如是全部服务器/某个国家/某个区域开放 ? 活动时间:填写本活动的开始时间和结束时间活动时间注释:活动时间的相关注释,例如活动开始时需要启动的功能/模块,活动结束时需要关闭的功能/模块参与条件判定是否满足要求条件一:若是,则进行何种判断 ? 若否,则进行何种判断 ? 条件二………… ……副本数量是否达到上限………… ……系统公告提前公告://活动开始前一段时间播放,用于预告,若有,则需写明开始日期,结束日期 ? 具体每日播放时间具体公告文字内容//包括字色 ? 定时公告://活动开始后的公告开始日期,结束日期篇二:游戏策划案模板网络游戏策划书标准模版网络游戏:时间:审核:时间:批准:时间:编号:GOD-F-001-20101-0001-000001-07-05/7/22-ON 目录第一章:输入文件输入文件清单序号文件名文件编号备注1项目立项说明书GOM-F-001-20101-0001-000012-07-05/7/22-ON项目立项说明书此文件是"项目立项"工序之输出文件.内容如下:1.游戏类型:2.图形外观及要求:1)游戏风格:2)游戏视角:3)图形分辨率:4)图形颜色:3.游戏引擎:VOSI网络游戏通用引擎.4.数据库:5.目标客户:游戏所要锁定的目标用户群,及对此用户群所做的概况分析包括年龄,基本心理,喜好,职业,收入水平,在线时间,未来潜质等等逐一分析1)目标用户构成:2)用户需求分析:3)用户特点分析:6.客户端平台:(运行游戏客户端所需最低配置要求)操作系统:CPU:内存:显卡:网络连接:7.服务器平台:(运行游戏服务端所需标准配置要求)操作系统:CPU:内存:硬盘:网络连接:8.文化主题:9.游戏特点:10.竞争性:(对市场上目前运营的同款类型游戏做一个简单的分析对比,估算出同类游戏与你将要开发游戏的市场竞争性)11.可行性分析1)市场可行性分析2)技术可行性分析12.项目预算项目开发进度计划、开发周期总共所要耗费的资源及时间、各进度要耗费的资源及时间 RIO表等等第二章:标准规范规范文件清单序号文件名文件编号备注1网络游戏策划规范VS-G-000236/20052文件命名规范VS-M-000212/2005注:网络游戏策划规范为标准族内分网络游戏策划规范总则 VS-G-000236-1/2005网络游戏客户分析规范 VS-G-000236-2/2005网络游戏界面设计规范 VS-G-000236-3/2005网络游戏系统设定规范 VS-G-000236-4/2005网络游戏规则设定规范 VS-G-000236-5/2005网络游戏美工设定规范 VS-G-000236-6/2005网络游戏音响设定规范 VS-G-000236-7/2005第三章:界面设定在项目立项之技术可行分析时应确定策划工序所用方法,团队技术能力及磨合水平不高,或项目比较复杂时推荐使用界面分析法.游戏界面是人与游戏软硬件系统之间的媒介.用户通过界面来与游戏系统进行信息交换. 网络游戏按功能划分一般有以下几种界面1)登录、更新、公告界面2)选区、选角界面3)游戏主界面还有开场界面、结束界面等等过渡性界面.以下仅以游戏主界面为例讲解其中内容,其余各界面以此类推3.游戏主界面1)界面分析根据界面的功能、表达的信息量及视觉传达要求将界面分成完整的子界面,再于各子界面中分拆出需要用弹出等内层表达的界面框.2)界面流程:画出各部分的操作流向.3)功能分析:对子界面所要实现的功能进行描述,尽量使用直观的参考资料和示意图,方便策划意图的传达(1)功能描述:对界面内所实施之功能进行系统性描述.(2)参考资料:(3)流程图解:(4)资源分析:分析该功能所使用到的资源(主要为图音)并归总.功能分析清单功能名称功能分析流程图解参考资料资源分析本章文件作为网络策划工序之程序部分的标准输出文件第四章:系统设定此章节往往于界面设定前描述,也常被综合于界面设定章节,放于此位置者即为补充说明类型. 网络游戏作为一个社会性软件,具有明显系统性,有如下方面1.社交系统交友互动部分2.社群系统社会裙体部分,职业、用户群体或阵营的平衡3.经济系统游戏活动的产出、保存及消耗平衡4.发展系统游戏社会的发展,与游戏寿命密切相关.5.文化系统剧情、任务、文化内涵等等.第五章:游戏规则用以补充说明各功能所使用之逻辑或规则.技能规则截球技能前提:操作角色的对立阵营角色控球技能说明:发动此技能,角色会以现有跑步状态自动逼近带球者(预发动状态),在有效距离内(1格—碰撞时)发动铲球动作(发动状态).该技能成功发动时,一定机率夺得球的控制权.在有效距离内发动此技能时,技能直接发动.在预发动状态,假如球脱离当前目标控制(射门、传出等),技能自动停止,角色进入停止状态.在发动状态,假如体力少于技能消耗值,技能自动停止,角色进入停止状态.在技能预发动状态过程中,发动其它技能(包含改变跑动方向等其它动作)都会打断当前技能执行下一指令动作:截球(见美工设定)声效:截球(见声响设定)格式:资源:快键:图标消耗:FDR007(截球消耗)=20规则:FCR005(截球规则)截球成功率=发动者智慧值/(发动者智慧值+带球者智慧值)第六章:美工设定按各界面分析其美工需要实现元素,此部分为美工工作输入文件例如4.游戏主界面美工设定1)场景2)人物(2)男性角色[1]造型设定1.造型描述:A.体型:B.服饰:C.脸部:D.发型:E.神态:F.细节:2.参考资料3.过程文件A.原画B.造型[2]动作设定1.动作描述2.参考资料3.动作要求3)道具4)UI界面第七章:音响设定按各界面功能需要分析其音响设定音响设定表功能音响名称效果描述特殊说明文件名称网络游戏事业部内部文件(绝密)篇三:游戏评估模板.doc《飞天风云》修改记录and munication of its contents not permitted without written authorization.All rights reserved by Optisp, passing on and copying of this document, use目录目录.................................................... ...................................................... ......................................................1 第一章:游戏简介 : ................................................. ...................................................... .................................. 2 游戏画面: .................................................. ...................................................... ............................................... 2 音乐音效: ................................................. ...................................................... .............................................. 2 游戏性、黏着度: ................................................. ...................................................... .................................. 2 游戏整体评价: .................................................. ...................................................... ....................................... 3 第二章:游戏市场分析 ................................................... ...................................................... .......................... 5 SWOT 分析: ................................................. ...................................................... ............................................ 5 产品基本面分析: ................................................. ...................................................... .................................. 5 总结: ................................................. ...................................................... (6)第一章:游戏简介 :《飞天风云》是一款以奇幻冒险为主题的大型网络冒险类游戏。
学生信息管理系统之系统分析说明书指导老师:刘跃娟组员:徐明畅吕欣魏和明宋文波邹小明马淑娟谢迎设计者:魏和明目录第一章系统概述及介绍 (3)1.1概述 (3)1.2系统介绍 (3)1.3 系统相关对象介绍 (3)第二章系统需求分析及目标 (4)2.1系统需求分析 (4)2.2系统目标 (4)3.1系统功能 (4)3.2系统逻辑模型 (5)第四章系统运行环境 (6)第五章系统验收标准和培训计划 (6)第一章系统概述及介绍1.1概述学生信息管理系统(Student Information Management System),以下简称SIMS,是针对学校人事处的大量业务处理工作而开发的管理软件,是典型的管理信息系统(Management Information System)。
它是一个教育单位不可缺少的部分,它的内容对于学校的决策者和管理者来说都至关重要,它能够为用户提供充足的信息和快捷的查询手段。
能有效的帮助学校和老师掌握学生的情况,为学生提供成绩跟课程方面的查询。
在传统模式下利用人工进行学生信息管理,存在着较多的缺点,如:效率底,保密性差,时间一长将产生大量的文件和数据,更不便于查找,更新,维护等。
诸如这些情况,令学校管理者对学生的信息管理带来了很大困难,严重影响了教育工作者的工作效率。
随着科学技术的不断提高,计算机科学日渐成熟, 使用日趋成熟的计算机技术来代替传统的人工模式,来实现学生信息的现代化管理,其强大的功能已为人们深刻认识,它已进入人类社会的各个领域并发挥着越来越重要的作用。
作为计算机应用的一部分,使用计算机对学生信息进行管理,具有着手工管理所无法比拟的优点.例如:检索迅速、查找方便、易修改、可靠性高、存储量大、数据处理快捷、保密性好、寿命长、成本低等。
这些优点能够极大地提高学生信息管理的效率,也是学校的科学化、正规化管理,与世界接轨的重要条件。
因此,开发这样一套管理软件成为很有必要的事情。
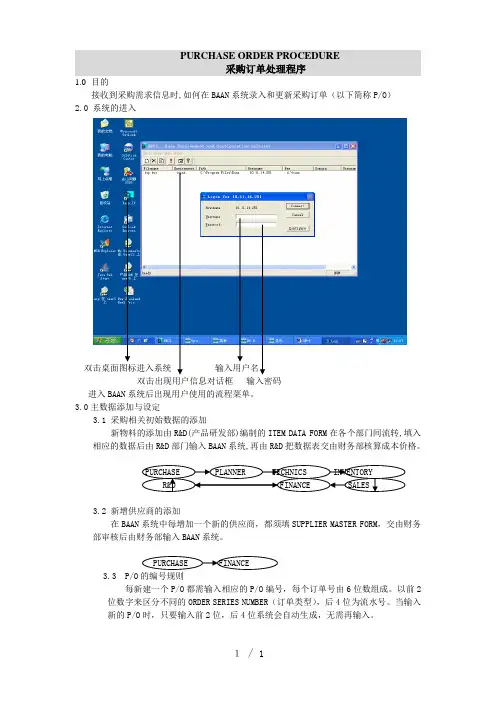
PURCHASE ORDER PROCEDURE采购订单处理程序1.0目的接收到采购需求信息时,如何在BAAN系统录入和更新采购订单(以下简称P/O)2.0 系统的进入双击桌面图标进入系统输入用户名双击出现用户信息对话框输入密码进入BAAN系统后出现用户使用的流程菜单。
3.0主数据添加与设定3.1 采购相关初始数据的添加新物料的添加由R&D(产品研发部)编制的ITEM DATA FORM在各个部门间流转,填入相应的数据后由R&D部门输入BAAN系统,再由R&D把数据表交由财务部核算成本价格。
PURCHASE PLANNER TECHNICS INVENTORYR&D FINANCE SALES3.2 新增供应商的添加在BAAN系统中每增加一个新的供应商,都须填SUPPLIER MASTER FORM,交由财务部审核后由财务部输入BAAN系统。
PURCHASE FINANCE3.3 P/O的编号规则每新建一个P/O都需输入相应的P/O编号,每个订单号由6位数组成。
以前2位数字来区分不同的ORDER SERIES NUMBER(订单类型),后4位为流水号。
当输入新的P/O时,只要输入前2位,后4位系统会自动生成,无需再输入。
3.4 P/O流程分类在输入订单时,根据订单类型来选择不同的仓库。
4.0 Maintain Prices by Item 物料单价的维护图例1: Maintain Prices by Item 物料单价的维护目的:按供应商报价单将物料单价输入系统路径:Maintain Purchase Prices & Discount Business Flow/Maintain Prices by Item 程序:(见图例1)输入:单击(注:每输入一个数据用键移动至相应框)物料: 输入相应的物料代码价格: 输入此次新价格(注:不列的项目为系统默认项)在表格1内输完以上数据后,表格2内的数据无须改动,单击存盘退出。
系统维护手册(文档格式)系统维护手册1. 引言1.1 编写目的阐明编写本系统维护手册的目的,指出读者对象。
1.2 项目背景列出本项目的委托单位、开发单位和主管部门;该软件系统与其他系统的关系。
1.3 定义列出本文档中所用到的专门术语的定义和缩写词的原意。
1.4 参考资料列出有关资料的作者、标题、编号、发表日期、出版单位或资料来源。
包括本项目经核准的计划任务书、合同或上级机关的批文,项目开发计划,需求规格说明书,概要设计说明书,数据库设计说明书,详细设计说明书,模块开发卷宗,本文档中所引用的资料、采用的标准和规范。
2. 系统说明2.1 系统用途说明系统具备的功能、输入和输出。
2.2 安全保密说明系统安全保密方面的考虑。
2.3 总体说明说明系统的总体功能,对系统、子系统和作业等作出综合性的介绍,并用图表方式给出系统主要部分的内部关系。
2.4 程序说明说明系统中每一程序、分程序的细节和特性。
主要包括以下内容:(1) 程序所具有的功能(2) 程序功能实现方法(3) 程序中的输入数据(4) 程序中对数据的处理流程(5) 程序中的输出数据(6) 系统内部程序之间的接口(7) 程序中需要使用的各种表格3. 操作环境3.1 设备逐项说明系统的设备配置及其特性。
3.2 支持软件列出系统使用的支持软件,包括它们的名称和版本号。
3.3 数据库3.3.1 总体特征包括数据库标识符,使用这些数据库的程序,静态数据、动态数据,数据库的存储媒体,程序使用数据库的限制等。
3.3.2 结构及详细说明说明数据库的结构,涉及数据库中的表、记录、字段等。
4. 维护过程4.1 约定列出该软件设计中所使用的全部规则和约定。
4.2 验证过程说明一个程序段修改后,对其进行验证的要求和过程。
4.3 出错及纠正方法列出出错状态及其纠正方法。
4.4 专门维护过程说明本文档其他地方没有提到的专门维护过程。
4.5 专用维护程序列出维护软件系统使用的后备技术和专用程序,如文件恢复程序。
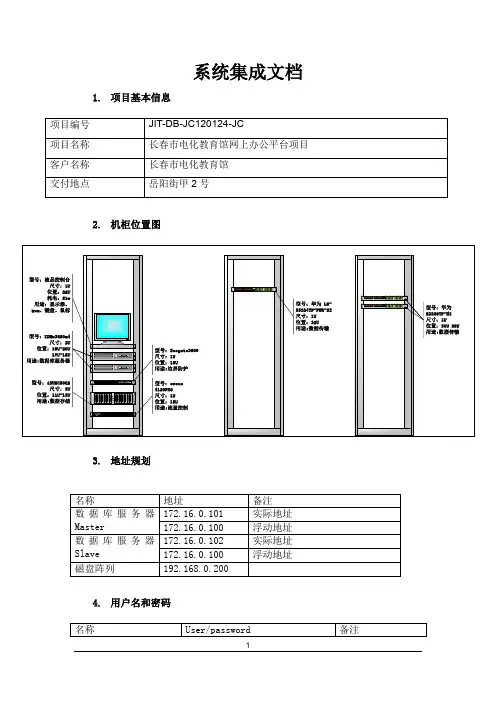
系统集成文档1.项目基本信息2.机柜位置图3.地址规划4.用户名和密码5.磁盘阵列基础配置登录存储系统启动浏览器,在浏览器地址栏里输入NetStor iSUM450G2存储系统的默认IP地址:192.168.0.200。
出现登录界面输入用户名与密码用户名:administrator密码:password输入完成后点击登录。
点击左侧“磁盘阵列”选项,点击上侧创建下拉菜单中的“高级配置”选择创建的磁盘数量,本次项目中共有8块磁盘,其中1块做为全局热备使用,其余7块创建逻辑驱动器。
这里选择7块磁盘。
选择7块磁盘后,点击向右的箭头,并点击“下一步”。
选择逻辑驱动器Raid级别及大小第一个逻辑驱动器大小为:2.26TB,Raid级别为:Raid5,别名为:oradata。
选择好后,点击“更新”。
第二个逻辑驱动器大小为:1TB,Raid级别为:Raid5,别名为:backup。
选择好后,点击“更新”。
更新完成后点击“下一步”。
成。
添加主机WWN信息本次项目中,存储系统分别给两台服务器使用。
当两台服务器处于开机状态,并通过光纤通道连接到存储系统时,存储系统会自动识别到服务器光纤卡的WWN号,从而通过WWN号映射逻辑驱动器。
点击左侧“管理工具”中的“光纤通道管理”选项,在右侧界面中点选“已登录设备”。
可以看到两个WWN号,选中两个WWN号,点击“添加到启动器列表”。
建立LUN映射点击左侧“管理工具”中的“存储服务”,点击右侧界面中“LUN映射”的下拉菜单“添加LUN映射”。
在“启动器”选项中选择刚才添加过的服务器光纤卡的WWN号服务器WWN号分别为:21-00-00-24-ff-0c-9e-53;21-00-00-24-ff-0c-9c85。
勾选“启用LUN 屏蔽”,点击“提交”。
创建全局热备盘点击左侧菜单中的“备用驱动器”,点击右侧界面中的“创建”。
选择第8块磁盘,点击向右箭头,点击“更新”。
确定无误后,点击“提交”创建完成。