2.4 机器人机身及行走机构
- 格式:ppt
- 大小:5.71 MB
- 文档页数:51
小型行走机构设计与制作构念小型行走机构设计与制作构念小型行走机构的设计和制作是一个充满挑战和创新的过程。
下面介绍一些小型行走机构设计与制作的构念,帮助读者更好地理解这一过程。
1. 结构设计小型行走机构的结构设计需要考虑哪些因素?首先是尺寸大小。
行走机构需要根据不同使用环境和需求制定尺寸,例如室内、室外、平地或者起伏的地形,不同尺寸大小可以更好地适应不同的环境。
另外,结构设计需要考虑机器人的重量和负载,以及运动速度和精准度等因素。
2. 动力控制小型行走机构的动力控制包括电池、马达、电机驱动和控制器等方面。
机器人的独立动力来源使得其在运动时更加灵活,但是需要用较小的电池来保持电量,因此需要设计节能和高效的动力控制系统。
控制器的设计需要考虑行走机构的速度和方向控制,以及保证机器人的平衡和稳定性。
3. 传感器控制小型行走机构的传感器控制需要考虑哪些方面?传感器包括距离传感器、红外线传感器、声音探测器等多种类型,可以让机器人更好地感知外部环境。
传感器可以帮助机器人识别不同的场景和障碍物,实现自动避障和导航等功能。
传感器的设计需要在机器人尺寸、功耗、数据处理、算法等多方面进行综合考虑。
4. 底盘设计小型行走机构的底盘设计包括机身结构、轮子和履带等部分。
底盘设计需要考虑机器人的稳定性、平衡和压强分布等因素。
轮子和履带的设计也需要根据不同场景和需求进行优化,例如行走机构需要通过狭窄的通道,需要使用较小的轮子或运用履带技术等。
5. 可编程设计小型行走机构的可编程设计可以实现多种不同的功能和应用。
机器人可以通过编程实现自主导航、舞蹈表演、避障探路、安保巡检等多种实用功能。
可编程设计需要使用不同编程语言,例如Python、C++和Java等,可根据需求选择不同的开发工具和编程语言。
总之,小型行走机构的设计与制作需要在多方面进行综合考虑,例如结构设计、动力控制、传感器控制、底盘设计和可编程设计等。
这一过程需要设计师团队间密切合作和深入探讨,以实现行走机构的最佳性能和最佳结果。
0.1简述工业机器人的立义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装程,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1. 机器人的动作结构具有类似于人或英他生物体某些器官(肢体、感官等)的功能。
2. 机器人具有通用性,工作种类多样,动作程序灵活易变。
3. 机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4. 机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0. 2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链:2. 工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统:3. 工业机器人是用于工业中务种作业的自动化机器而数控机床应用于冷加工。
4. 机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复左位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复立位精度是关于精度的统汁数据,指机器人重复到达某一确定位置准确的概率,是重复同一位苣的范用,可以用各次不同位程平均值的偏差来表示。
工作范用是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳左速度,也可以泄义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特怎作业时具有多余自由度的机器人称为冗余自由度机器人。
3.1何谓轨迹规划?简述轨迹规划的方法并说明其特点。
答:机器人的轨迹泛指工业机器人在运动过程中的运动轨迹,即运动点位移,速度和加速度。
轨迹的生成一般是先给左轨迹上的若干个点,将其经运动学反解映射到关节空间,对关节空间中的相应点建立运动方程,然后按这些运动方程对关节进行插值,从而实现作业空间的运动要求,这一过程通常称为轨迹规划。

0.1 简述工业机器人的定义,说明机器人的主要特征。
答:机器人是一种用于移动各种材料、零件、工具、或专用装置,通过可编程动作来执行种种任务并具有编程能力的多功能机械手。
1.机器人的动作结构具有类似于人或其他生物体某些器官(肢体、感官等)的功能。
2.机器人具有通用性,工作种类多样,动作程序灵活易变。
3.机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等。
4.机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
0.2工业机器人与数控机床有什么区别?答:1.机器人的运动为开式运动链而数控机床为闭式运动链;2.工业机器人一般具有多关节,数控机床一般无关节且均为直角坐标系统;3.工业机器人是用于工业中各种作业的自动化机器而数控机床应用于冷加工。
4.机器人灵活性好,数控机床灵活性差。
0.5简述下面几个术语的含义:自有度、重复定位精度、工作范围、工作速度、承载能力。
答:自由度是机器人所具有的独立坐标运动的数目,不包括手爪(末端执行器)的开合自由度。
重复定位精度是关于精度的统计数据,指机器人重复到达某一确定位置准确的概率,是重复同一位置的范围,可以用各次不同位置平均值的偏差来表示。
工作范围是指机器人手臂末端或手腕中心所能到达的所有点的集合,也叫工作区域。
工作速度一般指最大工作速度,可以是指自由度上最大的稳定速度,也可以定义为手臂末端最大的合成速度(通常在技术参数中加以说明)。
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。
0.6什么叫冗余自由度机器人?答:从运动学的观点看,完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
0.7题0.7图所示为二自由度平面关节型机器人机械手,图中L1=2L2,关节的转角范围是0゜≤θ1≤180゜,-90゜≤θ2≤180゜,画出该机械手的工作范围(画图时可以设L2=3cm)。
1.1 点矢量v 为]00.3000.2000.10[T ,相对参考系作如下齐次坐标变换:A=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--10000.9000.1000.0000.00.3000.0866.0500.00.11000.0500.0866.0 写出变换后点矢量v 的表达式,并说明是什么性质的变换,写出旋转算子Rot 及平移算子Trans 。
机器人本体组成机器人本体就是机器人的机械部分,又叫操作机,是工业机器人的操作机构,是指工业机器人的原样和自身。
整体机器人还有其它的配套软件和配套设备组成。
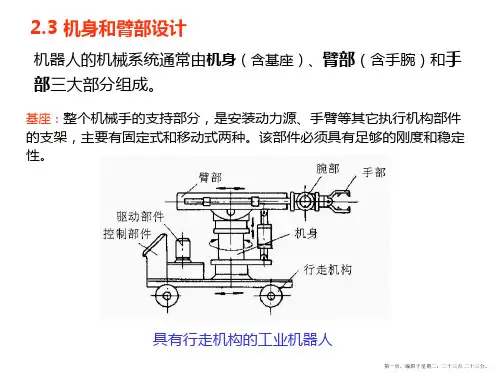
机器人本体基本结构由五部分组成:1、传动部件;2、机身及行走机构;3、臂部;4、腕部;5、手部。
机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。
机器人本体的结构特点有:1、工业机器人本体可以简化成各连接杆首尾相连、末端开放的一个开式运动链,机器人本体的结构刚度差,并随空间位置的变化而变化;2、机器人本体的每个连杆都具有独立的驱动器,连杆的运动各自独立,运动更为灵活;一般连杆机构有1-2个原动件,各连杆间的运动是相互约束的。
3、连杆驱动扭矩变化复杂,和执行件位置相关。
对机器人本体的基本要求:自重小:改善机器人操作的动态性能;静动态刚度高:提高定位精度和跟踪精度;增加机械系统设计的灵活性;减小定位时的超调量稳定时间,降低对控制系统的要求和系统造价;固有频率高:避开机器人的工作频率,有利于系统的稳定。
好的机器人本体门槛很高,除了电机、减速机的硬伤之外,好的结构设计也非常难,这就是为什么国内机器人本体做得好的、批量生产一致性很好的机器人厂商很少。
如果能在这个上面有所突破,那就非常有前途。
很多人都认为机器人本体无非是实际各个轴的相对连接,本体制造多样,一般是铸铝。
但是实际上好的机器人本体要复杂得多,会有很多细节的问题:比如说如果让重心降低,性能提升;电机与减速机的装配如何保证精度;本体的制造工艺如何保证一致性,装配如何实际稳定产量;如何解决电机散热问题;如何保证线缆长时间不损坏;如何保证机器人重复定位精度保持稳定;如何提高机器人动作的平滑,特别是低速运行时不会抖动。
机器人本体的特点讲解机器人本体结构是机体结构和机械传动系统,也是机器人的支承基础和执行机构。
机器人本体基本结构由以下五部分组成:1、传动部件;2、机身及行走机构;3、臂部;4、腕部;5、手部。
工业机器人具体组成详解:1.机械本体:机器人的机械本体机构基本上分为两大类,一类是操作本体机构,它类似人的手臂和手腕,另一类为移动型本体结构,主要实现移动功能,主流的工业机器人本体制造商有发那科、ABB、安川、库卡等。
2.驱动伺服单元:伺服单元的作用是使驱动单元驱动关节并带动负载按预定的轨迹运动。
已广泛采用的驱动方式有:液压伺服驱动、电机伺服驱动,气动伺服驱动,市场上主流的伺服电机厂家有安川、多摩川、拉法特、三菱、富士、松下。
3.数控系统:各关节伺服驱动的指令值由主计算机计算后,在各采样周期给出。
机器人通常采用主计算机与关节驱动伺服计算机两级计算机控制,计算机控制系统包括电机驱动软件和轨迹控制软件,其中轨迹控制软件奥地利KEBA公司设计的比较好。
4.传感系统:除了关节伺服驱动系统的位置传感器(称作内部传感器)外,还需要搭配视觉、力觉、触觉、接近等多种类型的传感器(称作外部传感器)。
5.输出/输入系统接口:为了与周边系统及相应操作进行联机与应答,会开放各种通信接口和人机通信装置。
工业机器人本体厂商主要生产机器人,工作内容包括生产机器人关键零部件、控制算法和设计开发环境等;系统集成商的工作是工艺的把握,资源的整合,是把生产出来的机器人与视觉传感器、机床设备等等进行连接和调试,这样一台机器人才能正式投入使用。
工业机器人本体的发展需要系统集成商的推动,而系统集成商集成也需要本体厂商的支持。
对本体厂商来说,机器人的应用问题也关系着本体企业的发展壮大,所以与系统集成商的配合则显得尤为重要。
工业机器人本体生产商的利润点是产品的销售利润,关注点在产品上,主要是把产品本身质量做好,不考虑系统制作的问题。