基于耦合电感理论的同步电机数学模型分析
- 格式:pdf
- 大小:251.74 KB
- 文档页数:5
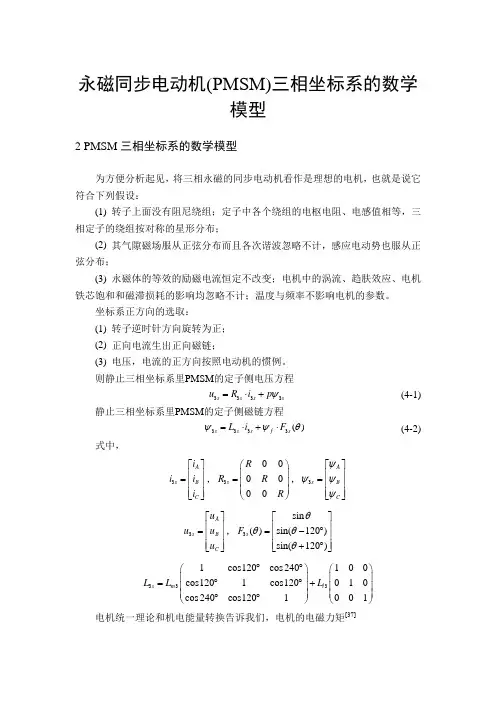
永磁同步电动机(PMSM)三相坐标系的数学模型2 PMSM 三相坐标系的数学模型为方便分析起见,将三相永磁的同步电动机看作是理想的电机,也就是说它符合下列假设:(1) 转子上面没有阻尼绕组;定子中各个绕组的电枢电阻、电感值相等,三相定子的绕组按对称的星形分布;(2) 其气隙磁场服从正弦分布而且各次谐波忽略不计,感应电动势也服从正弦分布;(3) 永磁体的等效的励磁电流恒定不改变;电机中的涡流、趋肤效应、电机铁芯饱和和磁滞损耗的影响均忽略不计;温度与频率不影响电机的参数。
坐标系正方向的选取: (1) 转子逆时针方向旋转为正; (2) 正向电流生出正向磁链;(3) 电压,电流的正方向按照电动机的惯例。
则静止三相坐标系里PMSM 的定子侧电压方程3333s s s s u R i p ψ=⋅+ (4-1)静止三相坐标系里PMSM 的定子侧磁链方程3333()s s s f s L i F ψψθ=⋅+⋅ (4-2) 式中,3A s B C i i i i ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3000000s R R R R ⎛⎫ ⎪=⎪ ⎪⎝⎭,3A s B C ψψψψ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦ 3A s B C u u u u ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦,3sin ()sin(120)sin(120)s F θθθθ⎡⎤⎢⎥=-︒⎢⎥⎢⎥+︒⎣⎦3331cos120cos 240100cos1201cos120010cos 240cos1201001s m l L L L ︒︒⎛⎫⎛⎫⎪ ⎪=︒︒+ ⎪ ⎪ ⎪ ⎪︒︒⎝⎭⎝⎭电机统一理论和机电能量转换告诉我们,电机的电磁力矩[37]*I m ()s s e p T n i ψ=- (4-3) 式中,*代表取共轭复数,Im 代表取虚部。
3 PMSMdq 坐标系的数学模型三相交流电机是一个耦合强、非线性、阶次高的多变量系统,它在三相静止的坐标系里的数学模型相当复杂,应用传统的控制策略对其实现交流调速有很大的困难,所以对于一般的三相交流电机常常应用矢量控制的方法,采用坐标变换,把三相交流的绕组等效变换成两相互相垂直的交流绕组或者旋转的两相直流的绕组,等效变换以后其产生的磁动势相等,系统的变量之间得到了部分的解耦,它的数学模型得到了大大简化,使得对于系统的分析和控制也简化了很多,使得它的数学模型与比较简单的直流电机类似[52]。
同步电机系统传递函数模型和状态空间模型同步电机系统传递函数模型和状态空间模型引言同步电机是一种重要的电动机类型,广泛应用于工业领域。
为了能够准确描述同步电机的运行特性,传递函数模型和状态空间模型是常用的数学工具。
本文将从基础理论出发,系统地介绍同步电机系统的传递函数模型和状态空间模型。
同步电机的传递函数模型传递函数模型是用来描述系统输入和输出之间关系的数学模型。
同步电机的传递函数模型可以通过对其系统方程进行 Laplace 变换获得。
系统方程同步电机的系统方程可以用以下形式表示:G(s)⋅I(s)=E(s)其中,G(s)是系统的传递函数,I(s)是电机的输入信号(电流),E(s)是电机的输出信号(电动势)。
传递函数通过对系统方程进行变换,可以得到同步电机的传递函数:G(s)=E(s) I(s)同步电机的传递函数一般为一个复数多项式的比值。
同步电机的状态空间模型状态空间模型是一种更加直观、直接的描述系统动态行为的数学模型。
同步电机的状态空间模型可以通过将系统方程转换成状态方程的形式来表示。
状态方程同步电机的状态方程可以用以下形式表示:dx(t)=Ax(t)+Bu(t)dty(t)=Cx(t)+Du(t)其中,x(t)是状态向量(包含电机的各种状态),u(t)是输入向量(电机的输入信号),y(t)是输出向量(电机的输出信号),A、B、C和D是系统的系数矩阵。
系数矩阵系数矩阵A是描述状态变量之间相互关系的矩阵,矩阵的维度与状态量的个数相同。
系数矩阵B是描述输入信号对状态变量的影响的矩阵,矩阵的维度与输入量的个数相同。
系数矩阵C是描述状态变量对输出信号的影响的矩阵,矩阵的维度与输出量的个数相同。
系数矩阵D是描述直接影响输出信号的输入信号的矩阵。
状态空间模型的优势与传递函数模型相比,状态空间模型具有以下优势: 1. 直观性:状态空间模型能够更加直接、直观地描述系统的动态行为。
2. 灵活性:状态空间模型能够更加灵活地处理多输入多输出系统。
同步电机数学模型的建立和仿真姓名:包邻淋专业:控制工程学号:1402094摘要 (3)1同步电机数学模型的建立 (4)1.1模型的导出思路 (4)1.2变量置换用的表达式 (5)1.4电机实用模型 (6)1.5电机实用模型的状态空间表达式 (8)1.6电机模型参数的确定 (10)2 同步电机数学模型的仿真 (13)2.1同步发电机仿真模型 (13)2.2不同阶次模型的仿真分析 (14)参考文献 (17)摘要一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。
电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。
常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。
同步发电机电路方程又分为基本方程和导出模型两类[4]。
对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。
同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。
如果转子绕组数减少,则发电机方程组的阶数也相应减少。
本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。
在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
1同步电机数学模型的建立1.1模型的导出思路由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。
现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。
基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。

![新编[工学]高等电力系统之同步电机数学模型](https://uimg.taocdn.com/0f593fdf0242a8956bece49e.webp)
上篇 电力系统元件数学模型1 同步电机数学模型1.1 abc 坐标下的有名值方程1.1.1 理想电机同步电机是电力系统的心脏,它是一种集旋转与静止、电磁变化与机械运动于一体,实现电能与机械能变换的元件,其动态性能十分复杂,而且其动态性能又对全电力系统的动态性能有极大影响,因此应对它作深入分析,以便建立用于研究分析电力系统各种物理问题的同步电机数学模型。
为了建立同步电机的数学模型,必须对实际的三相同步电机作必要的假定,以便简化分析计算。
通常假定:(1)电机磁铁部分的磁导率为常数,既忽略掉磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。
(2)对纵轴及横轴而言,电机转子在结构上是完全对称的。
(3)定子的3个绕组的位置在空间互相相差120º电角度,3个绕组在结构上完全相同。
同时,它们均在气隙中产生正弦形分布的磁动势。
(4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
满足上述假定条件的电机称为理想电机。
这些假定在大多数情况下已能满足实际工程问题研究的需要,下面的同步电机基本方程推导即基于上述理想电机的假定。
当需要考虑某些因素(如磁饱和等)时,则要对基本方程作相应修正。
图1-l 是双极理想电机的示意图,图中标明了各绕组电磁量的正方向。
必须特别强调的是,后面导出的同步电机基本方程是与图1-l 中所定义的电磁量正方向相对应的。
下面对图1-1中所定义的各电磁量正方向作必要的说明。
定子abc 三相绕组的对称轴a ,b ,c 空间互差120º电角度。
设转子逆时针旋转为旋转正方向,则其依次与静止的a ,b ,c 三轴相遇。
定子三相绕组磁链c b a ΨΨΨ,,的正方向分别与a ,b ,c 三轴正方向一致。
定子三相电流c b a i i i ,,的正方向如图1-1所示。
正值相电流产生相应相的负值磁动势和磁链。
这种正方向设定与正常运行时定子电流的去磁作用(电枢反应)相对应,有利于分析计算。
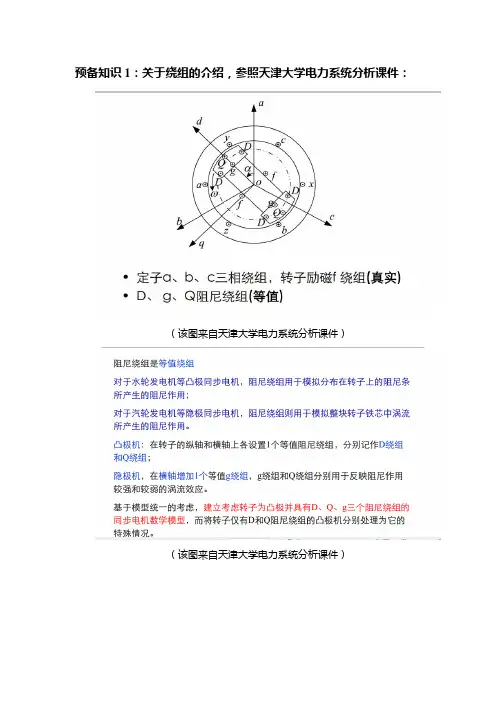
预备知识1:关于绕组的介绍,参照天津大学电力系统分析课件:(该图来自天津大学电力系统分析课件)(该图来自天津大学电力系统分析课件)预备知识2:同步机组9阶详细数学模型(注意,以下数学模型是以特定的参考方向定义为基础,不同的参考方向定义,数学模型表达式不同,这里仅仅是为了说明的方便直接使用了课件中的数学模型,读者不要直接套用)正式介绍各阶次详细模型(参考鞠平老师课件):首先介绍符号意义:((转子角速度)、(转子位置角)、(励磁绕组)、(转子直轴阻尼绕组)、转子交轴阻尼绕组)、(转子交轴阻尼绕组2)、(用户定义的定子坐标系d 轴)、(用户定义的定子坐标系q 轴)fD Q gd q ωδ然后这里以6阶为例进行说明上面要表达的意义:鞠平老师上面截图中6阶模型——、、、、、f g D Q ωδ注意这里少了d 、q 、0。
意义是在电压方程组中不考虑同步电机定子绕组d 轴、q 轴、0轴的电压方程的电磁暂态过程,即认为0;0q d d d dt dt ψψ==;00d dtψ=,所以电压方程组变为4阶(只有4个状态变量):0000000000d a d q q a q d a f f f f D D D D g g g g Q Q Q Q u r i u r i u r i u p r i u p r i u p r i u p r i ωψωψψψψψ--⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=++⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦,其中p 是微分算子,即d dt 。
这种简化的使用前提是,;q d q d d d dt dt ψψωψωψ,具体说明见下方截图(来自倪以信老师《动态电力系统的理论与分析》1.7.1节)。
这样4阶电压方程组、磁链代数方程组和2阶转子运动方程,就组成了描述同步机组动态物理特性的6阶详细数学模型,根据6阶详细模型可以进一步推导出6阶实用模型。