第六章同步电机数学模型
- 格式:ppt
- 大小:3.31 MB
- 文档页数:82
![新编[工学]高等电力系统之同步电机数学模型](https://uimg.taocdn.com/0f593fdf0242a8956bece49e.webp)
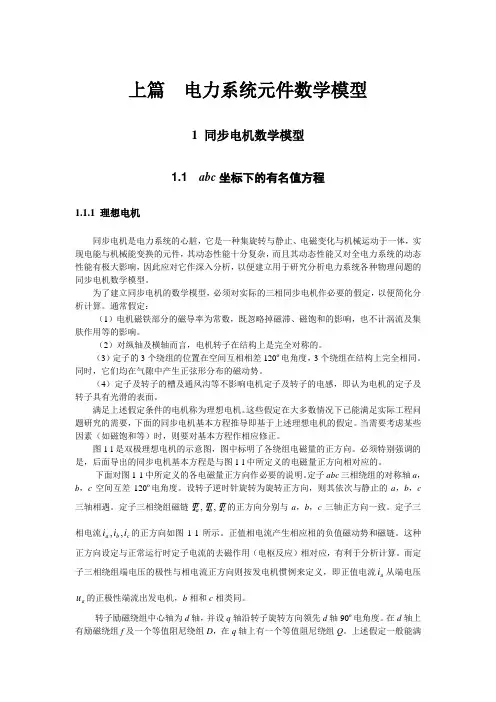
上篇 电力系统元件数学模型1 同步电机数学模型1.1 abc 坐标下的有名值方程1.1.1 理想电机同步电机是电力系统的心脏,它是一种集旋转与静止、电磁变化与机械运动于一体,实现电能与机械能变换的元件,其动态性能十分复杂,而且其动态性能又对全电力系统的动态性能有极大影响,因此应对它作深入分析,以便建立用于研究分析电力系统各种物理问题的同步电机数学模型。
为了建立同步电机的数学模型,必须对实际的三相同步电机作必要的假定,以便简化分析计算。
通常假定:(1)电机磁铁部分的磁导率为常数,既忽略掉磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。
(2)对纵轴及横轴而言,电机转子在结构上是完全对称的。
(3)定子的3个绕组的位置在空间互相相差120º电角度,3个绕组在结构上完全相同。
同时,它们均在气隙中产生正弦形分布的磁动势。
(4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
满足上述假定条件的电机称为理想电机。
这些假定在大多数情况下已能满足实际工程问题研究的需要,下面的同步电机基本方程推导即基于上述理想电机的假定。
当需要考虑某些因素(如磁饱和等)时,则要对基本方程作相应修正。
图1-l 是双极理想电机的示意图,图中标明了各绕组电磁量的正方向。
必须特别强调的是,后面导出的同步电机基本方程是与图1-l 中所定义的电磁量正方向相对应的。
下面对图1-1中所定义的各电磁量正方向作必要的说明。
定子abc 三相绕组的对称轴a ,b ,c 空间互差120º电角度。
设转子逆时针旋转为旋转正方向,则其依次与静止的a ,b ,c 三轴相遇。
定子三相绕组磁链c b a ΨΨΨ,,的正方向分别与a ,b ,c 三轴正方向一致。
定子三相电流c b a i i i ,,的正方向如图1-1所示。
正值相电流产生相应相的负值磁动势和磁链。
这种正方向设定与正常运行时定子电流的去磁作用(电枢反应)相对应,有利于分析计算。
永磁同步直线电机数学模型永磁同步直线电机是一种应用于直线运动控制系统的新型电机。
它具有高效率、高精度、高刚度和快速响应的特点,广泛应用于工业自动化、高速列车、机床、印刷、数控机床、半导体设备等领域。
永磁同步直线电机的数学模型是描述其运动规律的数学表达式。
通过建立数学模型,可以分析和预测电机的性能,并设计出最优的控制策略。
永磁同步直线电机的数学模型主要包括动态模型和静态模型两部分。
动态模型描述了电机的运动状态和响应特性。
它基于牛顿第二定律和电机动态方程建立,考虑了电机的负载惯性、摩擦力和电磁力等因素。
动态模型可以用于分析电机的加速度、速度和位置等动态性能。
静态模型描述了电机的静态特性。
它基于电机的静态平衡方程建立,考虑了电机的电磁力、重力和摩擦力等因素。
静态模型可以用于分析电机的静态力学性能,如电机的负载能力和刚度等。
在建立永磁同步直线电机的数学模型时,需要考虑电机的结构参数、电磁参数和控制参数等因素。
结构参数包括电机的长度、宽度和高度等几何尺寸,电磁参数包括电机的磁极数、电流和磁链等参数,控制参数包括电机的控制电流和控制电压等参数。
根据实际应用需求,可以对模型进行简化或者增加更多的参数,以提高模型的准确性和适用性。
通过数学模型,可以对永磁同步直线电机的性能进行分析和优化。
例如,可以通过模型预测电机的响应时间、稳态误差和精度等指标,在设计过程中选择合适的结构参数和控制参数,以实现最佳性能。
此外,还可以通过模型分析电机的负载能力和刚度,评估电机在不同工况下的可靠性和稳定性。
永磁同步直线电机的数学模型是分析和设计电机的重要工具。
通过建立准确的数学模型,可以深入理解电机的运动规律和特性,为电机的应用和控制提供有效的指导。
同时,也可以通过模型优化电机的性能,提高电机的效率和精度,满足不同领域和应用的需求。
永磁同步电机数学模型建立永磁同步电机是一种常用的电动机类型,具有高效率、高功率密度和高控制精度等优点,在工业和交通领域得到广泛应用。
为了实现对永磁同步电机的控制和优化设计,需要建立其数学模型。
本文将介绍永磁同步电机的数学模型建立过程,并对其进行详细分析。
首先,永磁同步电机的数学模型可以分为两个部分:电磁模型和机械模型。
电磁模型描述了电机的电磁特性,包括电机的电感、电阻和磁链等参数;机械模型描述了电机的机械特性,包括电机的转动惯量、摩擦力和负载扭矩等参数。
在电磁模型中,首先需要建立电机的磁链方程。
磁链方程描述了电机的磁链与电机的电流之间的关系。
对于永磁同步电机而言,其磁链方程可以表示为:ψ= Ld * id + Lq * iq其中,ψ表示电机的磁链,Ld和Lq分别表示电机的d轴和q轴的电感,id和iq分别表示电机的d轴和q轴的电流。
接下来,需要建立电机的电流方程。
电流方程描述了电机的电流与电机的电压之间的关系。
对于永磁同步电机而言,其电流方程可以表示为:ud = R * id + ω* Lq * iq + ω* ψuq = R * iq - ω* Ld * id其中,ud和uq分别表示电机的d轴和q轴的电压,R表示电机的电阻,ω表示电机的角速度。
在机械模型中,首先需要建立电机的转动方程。
转动方程描述了电机的转动惯量与电机的转矩之间的关系。
对于永磁同步电机而言,其转动方程可以表示为:J * dω/dt = Tm - Tl - Tf其中,J表示电机的转动惯量,Tm表示电机的电磁转矩,Tl表示电机的负载转矩,Tf表示电机的摩擦转矩。
最后,需要建立电机的速度方程。
速度方程描述了电机的速度与电机的转矩之间的关系。
对于永磁同步电机而言,其速度方程可以表示为:dθ/dt = ω其中,θ表示电机的转角,ω表示电机的角速度。
通过以上的数学模型,可以对永磁同步电机进行建模和仿真,实现对电机的控制和优化设计。
在实际应用中,可以通过调节电机的电流和电压来控制电机的转矩和速度,从而实现对电机的精确控制。
上篇 电力系统元件数学模型1 同步电机数学模型1.1 abc 坐标下的有名值方程1.1.1 理想电机同步电机是电力系统的心脏,它是一种集旋转与静止、电磁变化与机械运动于一体,实现电能与机械能变换的元件,其动态性能十分复杂,而且其动态性能又对全电力系统的动态性能有极大影响,因此应对它作深入分析,以便建立用于研究分析电力系统各种物理问题的同步电机数学模型。
为了建立同步电机的数学模型,必须对实际的三相同步电机作必要的假定,以便简化分析计算。
通常假定:(1)电机磁铁部分的磁导率为常数,既忽略掉磁滞、磁饱和的影响,也不计涡流及集肤作用等的影响。
(2)对纵轴及横轴而言,电机转子在结构上是完全对称的。
(3)定子的3个绕组的位置在空间互相相差120º电角度,3个绕组在结构上完全相同。
同时,它们均在气隙中产生正弦形分布的磁动势。
(4)定子及转子的槽及通风沟等不影响电机定子及转子的电感,即认为电机的定子及转子具有光滑的表面。
满足上述假定条件的电机称为理想电机。
这些假定在大多数情况下已能满足实际工程问题研究的需要,下面的同步电机基本方程推导即基于上述理想电机的假定。
当需要考虑某些因素(如磁饱和等)时,则要对基本方程作相应修正。
图1-l 是双极理想电机的示意图,图中标明了各绕组电磁量的正方向。
必须特别强调的是,后面导出的同步电机基本方程是与图1-l 中所定义的电磁量正方向相对应的。
下面对图1-1中所定义的各电磁量正方向作必要的说明。
定子abc 三相绕组的对称轴a ,b ,c 空间互差120º电角度。
设转子逆时针旋转为旋转正方向,则其依次与静止的a ,b ,c 三轴相遇。
定子三相绕组磁链c b a ΨΨΨ,,的正方向分别与a ,b ,c 三轴正方向一致。
定子三相电流c b a i i i ,,的正方向如图1-1所示。
正值相电流产生相应相的负值磁动势和磁链。
这种正方向设定与正常运行时定子电流的去磁作用(电枢反应)相对应,有利于分析计算。
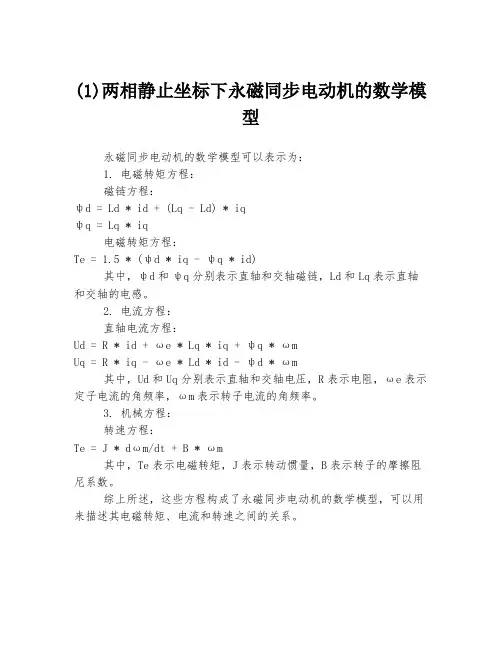
(1)两相静止坐标下永磁同步电动机的数学模
型
永磁同步电动机的数学模型可以表示为:
1. 电磁转矩方程:
磁链方程:
ψd = Ld * id + (Lq - Ld) * iq
ψq = Lq * iq
电磁转矩方程:
Te = 1.5 * (ψd * iq - ψq * id)
其中,ψd和ψq分别表示直轴和交轴磁链,Ld和Lq表示直轴和交轴的电感。
2. 电流方程:
直轴电流方程:
Ud = R * id + ωe * Lq * iq + ψq * ωm
Uq = R * iq - ωe * Ld * id - ψd * ωm
其中,Ud和Uq分别表示直轴和交轴电压,R表示电阻,ωe表示定子电流的角频率,ωm表示转子电流的角频率。
3. 机械方程:
转速方程:
Te = J * dωm/dt + B * ωm
其中,Te表示电磁转矩,J表示转动惯量,B表示转子的摩擦阻尼系数。
综上所述,这些方程构成了永磁同步电动机的数学模型,可以用来描述其电磁转矩、电流和转速之间的关系。
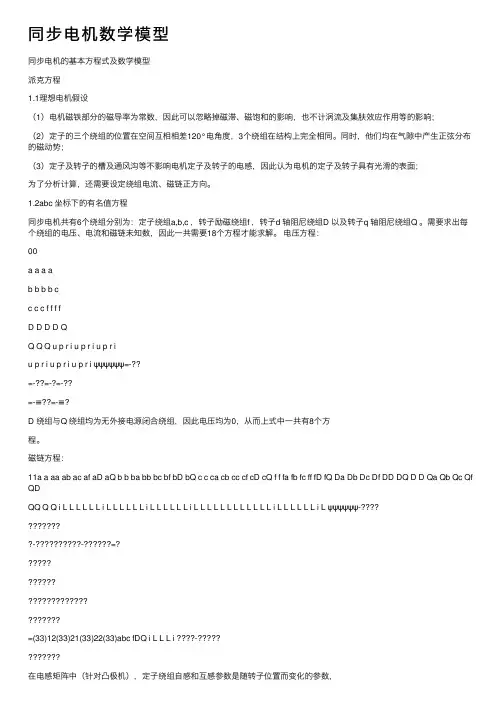
同步电机数学模型同步电机的基本⽅程式及数学模型派克⽅程1.1理想电机假设(1)电机磁铁部分的磁导率为常数,因此可以忽略掉磁滞、磁饱和的影响,也不计涡流及集肤效应作⽤等的影响;(2)定⼦的三个绕组的位置在空间互相相差120°电⾓度,3个绕组在结构上完全相同。
同时,他们均在⽓隙中产⽣正弦分布的磁动势;(3)定⼦及转⼦的槽及通风沟等不影响电机定⼦及转⼦的电感,因此认为电机的定⼦及转⼦具有光滑的表⾯;为了分析计算,还需要设定绕组电流、磁链正⽅向。
1.2abc 坐标下的有名值⽅程同步电机共有6个绕组分别为:定⼦绕组a,b,c ,转⼦励磁绕组f ,转⼦d 轴阻尼绕组D 以及转⼦q 轴阻尼绕组Q 。
需要求出每个绕组的电压、电流和磁链未知数,因此⼀共需要18个⽅程才能求解。
电压⽅程:00a a a ab b b b cc c c f f f fD D D D QQ Q Q u p r i u p r i u p r iu p r i u p r i u p r i ψψψψψψ=-??=-??=-?=-??=-≡??=-≡?D 绕组与Q 绕组均为⽆外接电源闭合绕组,因此电压均为0,从⽽上式中⼀共有8个⽅程。
磁链⽅程:11a a aa ab ac af aD aQ b b ba bb bc bf bD bQ c c ca cb cc cf cD cQ f f fa fb fc ff fD fQ Da Db Dc Df DD DQ D D Qa Qb Qc Qf QDQQ Q Q i L L L L L L i L L L L L L i L L L L L L i L L L L L L L L L L L L i L L L L L L i L ψψψψψψ---==(33)12(33)21(33)22(33)abc fDQ i L L L i -?在电感矩阵中(针对凸极机),定⼦绕组⾃感和互感参数是随转⼦位置⽽变化的参数,⽽在转⼦绕组中,转⼦的⾃感和互感参数均为常数,⽽且D 轴与Q 轴正交,则D 轴绕组与Q 轴绕组互感为0。
电力电子与交流传动系统仿真第6章交流电机的数学模型及参数关系 (1)6.1 三相异步电动机的数学模型 (2)6.2 三相同步电动机的数学模型 (5)6.3 永磁同步电动机的数学模型 (8)6.4 无刷直流电动机的数学模型 (14)6.5 交流电机的参数计算 (17)6.5.1 笼型绕组的多回路模型 (17)6.5.2 电感参数的解析计算 (19)6.5.3 磁路饱和问题的处理 (25)第6章 交流电机的数学模型及参数关系在第5章坐标变换与电机统一理论的基础上,本章针对现代交流传动控制系统中常用的三相异步电动机、三相同步电动机、永磁同步电动机和无刷直流电动机进行数学建模和参数分析,为后续的系统仿真奠定基础。
下面首先阐述电机建模的三个共性问题。
1. 正方向的规定 交流电机的数学模型由电机绕组的电压方程(包括磁链方程)和电机转子的运动方程(包括转矩方程)组成。
由于是对电力传动系统进行分析,考虑的都是电动机,所以采用电动机惯例列写电压方程和运动方程,即在电磁系统方面,以外加电压u 为正,线圈流入正向电流i 时,产生正值磁链ψ;同时,在机械系统方面,电机的电磁转矩em T 为驱动性质,与转子转速Ω同向,而外加负载转矩L T 为制动性质,与转子转速Ω反向,如图6-1所示。
uRL图6-1 正方向的规定2. 基本假设 交流电机的定子一般采用三相对称绕组,为简化问题,同时又不影响数学模型的精度,常作如下假设:1) 定子内壁、转子外表面光滑,不计齿槽效应。
2) 气隙磁密按正弦规律分布,不计空间高次谐波。
3) 铁芯磁路为线性,不计磁饱和效应。
3. 转子运动方程 各类交流电机的转子运动方程都是一样的,即⎪⎩⎪⎨⎧=++=t p t J R T T d d d d 0ΩL emθΩΩΩ(6-1)式中,Ω为转子机械角速度,θ为转子位置角,0p 为电机极对数,J 为转动部分的转动惯量,ΩR 为机械阻尼系数。
其区别仅在于电磁转矩em T 的不同计算。
PMSM 电机在旋转dq 坐标系中定子电压和定子磁链方程为d ds d q q q s q d d d d f q q q d u R i dtd u R i dt L i L iψωψψωψψψψ⎧=+-⎪⎪⎪=++⎨⎪=+⎪⎪=⎩(1)d u ,qu 为d 、q 轴的定子电压;d L ,qL 为d 、q 轴的电枢电感,对于隐极电机来说d L =q L =L;di ,q i为d 、q 轴的电枢电流;d ψ,q ψ为d 、q 轴的定子磁链;sR 为电枢绕组电阻;fψ为永磁铁产生的磁链,为常量;ω为电机电角速度,有r p ωω=,p 为电机的极对数,r ω为电机转子角速度;由式(1)推出:11d sd r q d q f s r d q r qdi R i p i u dt L L di p R p i i udtL L L ωψωω-⎧=++⎪⎪⎨--⎪=-+++⎪⎩ (2)PMSM 电机在旋转dq 坐标系中电磁转矩方程为()()1.5 1.5 1.5e d q q d d q d q f q f qT p i i p L L i i i p i ψψψψ=-⎡⎤=-+⎣⎦=(3)PMSM 电机的转子动力学方程为re m r d T T b Jdt ωω--=(4)e T 为电机的电磁转矩; mT 为电机的负载扭矩;b 为电机的阻尼系数; J 为电机的转动惯量;由式(3)式(4)可以推出1.5f m r q r p T d bi dt J J J ψωω--=++(5)状态方程为X AX Bu C =++选取,d d q q r i u X i u u ω⎛⎫⎛⎫ ⎪== ⎪⎪⎝⎭ ⎪⎝⎭,由式(2)式(5)推出10001,0,01.5000sr f s rm f R p L L p R A p B C L L L T p b J JJ ωψωψ⎛⎫⎛⎫-⎛⎫⎪ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪=---== ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪ ⎪-⎝⎭ ⎪ ⎪⎝⎭⎝⎭。
PMSM 电机在旋转dq 坐标系中定子电压和定子磁链方程为d ds d q q q s q d d d d f q q q d u R i dtd u R i dt L i L iψωψψωψψψψ⎧=+-⎪⎪⎪=++⎨⎪=+⎪⎪=⎩(1)d u ,qu 为d 、q 轴的定子电压;d L ,qL 为d 、q 轴的电枢电感,对于隐极电机来说d L =q L =L;di ,q i为d 、q 轴的电枢电流;d ψ,q ψ为d 、q 轴的定子磁链;sR 为电枢绕组电阻;fψ为永磁铁产生的磁链,为常量;ω为电机电角速度,有r p ωω=,p 为电机的极对数,r ω为电机转子角速度;由式(1)推出:11d sd r q d q f s r d q r qdi R i p i u dt L L di p R p i i udtL L L ωψωω-⎧=++⎪⎪⎨--⎪=-+++⎪⎩ (2)PMSM 电机在旋转dq 坐标系中电磁转矩方程为()()1.5 1.5 1.5e d q q d d q d q f q f qT p i i p L L i i i p i ψψψψ=-⎡⎤=-+⎣⎦=(3)PMSM 电机的转子动力学方程为re m r d T T b Jdt ωω--=(4)e T 为电机的电磁转矩; mT 为电机的负载扭矩;b 为电机的阻尼系数; J 为电机的转动惯量;由式(3)式(4)可以推出1.5f m r q r p T d bi dt J J J ψωω--=++(5)状态方程为X AX Bu C =++选取,d d q q r i u X i u u ω⎛⎫⎛⎫ ⎪== ⎪⎪⎝⎭ ⎪⎝⎭,由式(2)式(5)推出10001,0,01.5000sr f s rm f R p L L p R A p B C L L L T p b J JJ ωψωψ⎛⎫⎛⎫-⎛⎫⎪ ⎪ ⎪ ⎪ ⎪⎪⎪ ⎪=---== ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪⎪ ⎪-⎝⎭ ⎪ ⎪⎝⎭⎝⎭。