6 飞机的运动方程
- 格式:ppt
- 大小:2.16 MB
- 文档页数:23


目录1.请推导飞机小扰动运动方程,并分析其使用条件。
(2)2.什么是驾驶员操纵期望参数,分析其含义。
(12)3.请列写敏捷性尺度并对其含义进行分析说明。
(13)4.试说明评估飞机飞行性能的基本内容和基本方法。
(16)1.请推导飞机小扰动运动方程,并分析其使用条件。
一、小扰动法简介(1)基本概念研究飞行器的稳定性和操纵性问题时,一般把飞机运动分为基准运动和扰动运动。
基准运动(或称未扰动运动)是指在理想条件下,飞行器不受任何外界干扰,按预定规律进行的运动,如定直平飞、定常盘旋等。
基准运动参数用下标“*”表示,如V、*α、*θ等。
*由于各种干扰因素,使飞行器的运动参数偏离了基准运动参数,因而运动不按预定的规律进行,这种运动称为扰动运动。
受扰运动的参数,不附加任何特殊标记,例如V、α、θ等。
与基准运动差别甚小的扰动运动称为小扰动运动。
(2)基本假设在小扰动假设条件下,一般情况就能将飞行器运动方程进行线性化。
但为了便于将线性扰动运动方程组分离为彼此独立的两组,即纵向和横侧小扰动方程组,以减少方程组阶次而解析求解,还需要做下列假设:1)飞行器具有对称平面(气动外形和质量分布均对称),且略去机体内转动部件的陀螺力矩效应。
2)在基准运动中,对称平面处于铅垂位置(即0φ=),且运动所在平面且运动所在平面与飞行器对称平面相重合(即0β=)。
在满足上述条件下,可以认为,在扰动运动中,纵向气动力和力矩只与纵向运动参数有关,而横侧向气动力和力矩也只与横侧运动参数有关。
有了这些推论,就不难证明扰动运动方程可以分离为彼此独立的两组。
其中一组只包含纵向参数,即飞行器在铅垂平面内作对称飞行时的运动参数,,,,,,,,,g g e p u w q x z αθγδδ等,称为纵向扰动运动方程组;另一组只包含横侧参数,即飞行器在非对称平面内的运动参数,,,,,,,,,,g a r v p r y βψχφμδδ等,称为横侧向扰动运动方程组。
雷诺运动方程在物理学中,雷诺运动方程是描述粘性流体运动的基本方程之一。
该方程以法国数学家和物理学家兼工程师Clairaut Jean-Baptiste 先生的名字命名,他于1752年首次提出了这个方程。
雷诺运动方程描述了流体在流动过程中的运动规律,使我们能够更好地理解和分析流体的行为。
它是由守恒方程和纳维-斯托克斯方程组成的,对于粘性流体尤为重要。
雷诺运动方程的一般形式为:∂u/∂t + u·∇u = -∇p/ρ + ν∇²u其中,u是流体的速度矢量,t是时间,p是压力,ρ是密度,ν是粘性系数,∇是偏导数操作符。
雷诺运动方程的第一项是速度的时间变化率,代表了流体的加速度。
第二项是速度矢量u与速度梯度∇u的点积,表示了速度的非线性输运效应。
第三项是负的压力梯度除以密度,描述了压力梯度对速度的作用。
最后一项是粘性系数与速度梯度的二阶导数,表示了流体的粘性效应。
通过雷诺运动方程,我们可以推导出一些重要的流体动力学行为。
例如,在不可压缩流体中,斯托克斯流动是指粘性系数趋于无穷大时的流体运动。
斯托克斯流动是具有旋转和湍流的流体运动的极限情况,其中流体速度与粘性效应之间的比例关系得以体现。
雷诺运动方程也可以通过数值方法进行求解。
其中,有限差分方法和有限元方法是常用的求解技术。
通过离散化和数值逼近,我们可以得到近似解,并利用计算机模拟流体的运动行为,从而更好地理解和预测实际中的流体流动现象。
雷诺运动方程的应用非常广泛。
它在空气动力学、流体力学、水力学等领域中起着重要的作用。
例如,在飞机的设计过程中,雷诺运动方程可以用来模拟气动力学效应和空气阻力,帮助工程师优化飞机的外形和性能。
在船舶设计中,雷诺运动方程可以用来研究船体与水流的相互作用,提高航行稳定性和减小阻力。
此外,雷诺运动方程还可以应用于气象学、地球物理学、石油工程等领域。
总结起来,雷诺运动方程是描述粘性流体运动的重要方程之一。
它能够揭示流体在运动过程中各种因素的相互作用,为我们理解和探索流体力学现象提供了有力的工具。


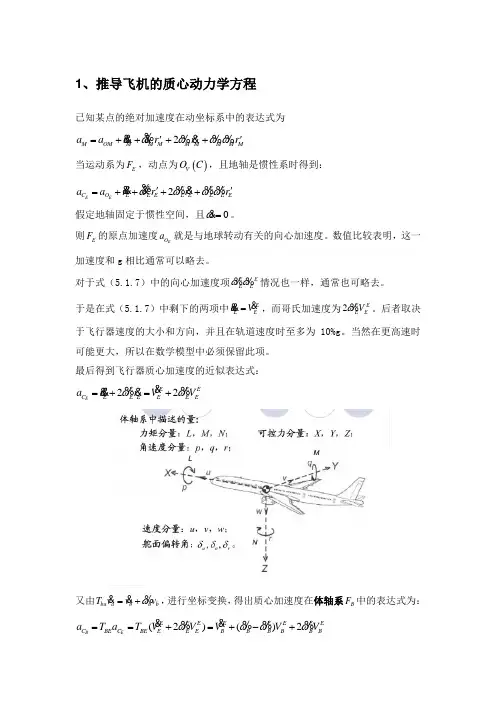
1、推导飞机的质心动力学方程 已知某点的绝对加速度在动坐标系中的表达式为 2MOMMMMMMMMMaarrrr
当运动系为EF,动点为VOC,且地轴是惯性系时得到:
2EEEEEECOEEEEEEEEaarrrr
假定地轴固定于惯性空间,且0。
则EF的原点加速度EOa就是与地球转动有关的向心加速度。数值比较表明,这一加速度和g相比通常可以略去。 对于式(5.1.7)中的向心加速度项EEEE情况也一样,通常也可略去。 于是在式(5.1.7)中剩下的两项中EEErV,而哥氏加速度为2EEEEV。后者取决于飞行器速度的大小和方向,并且在轨道速度时至多为10%g。当然在更高速时可能更大,所以在数学模型中必须保留此项。 最后得到飞行器质心加速度的近似表达式: 22EEEEECEEEEEEarrVV
又由baabbbTvvv,进行坐标变换,得出质心加速度在体轴系BF中的表达式为: (2)()2BEEEEEEEEECBECBEEEEBBBBBBaTaTVVVVV ()BEEECBBBBaVV
其中,,xEByzWuVvWwW,Bpqrcos0,sinEBEEEEBBBVVBVEBpqTTr
00,0Brqrpqp
000EEBBEEEBBBEEBBrqrpqp
当W=0时,带入上述各式得到: ()()()()()()EEBBCxEECyBBEEBBCzuqqwrrvaavrruppwwppvqqua
体轴系的外力fAmg,式中
,XAYZ
四翼飞行器动力学分析与建模1.引言四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。
这四轴飞行器(Quadrotor)是一种多旋翼飞行器。
四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。
因为它固有的复杂性,历史上从未有大型的商用四轴飞行器。
近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观。
本章通过分析四旋翼直升机的动力学机制,运用已知的物理定律和方程来建立表征系统动态过程的数学模型。
2.四旋翼飞行器简介2.1四旋翼飞行器结构四旋翼直升机主体构成有:产生升力的四个旋翼、飞行控制设备及其支撑旋翼的机身。
有时为了保护飞行器,避免旋翼的损坏,特别装设了保护架。
其中,每个旋翼包括直流电机、翼翅及连接件等部分。
如下图所示:2.2四旋翼飞行器飞行原理四旋翼直升机与传统的直升机相比,有着自己独特的地方。
它的四个呈十字平均分布的旋翼取代了传统的单独的旋翼,对机身产生单独的力和力矩。
四旋翼直升机通过改变旋翼转速来控制飞行器的姿态,且四个旋翼的动态特性高度耦合。
3.四旋翼飞行器动力学方程3.1坐标描述及其转换关系飞机的姿态角、飞行速度的大小和方向等参数总是和坐标系联系在一起的,要确切地描述飞机的运动状态,就要先建立适当的坐标系。
下面定义几种坐标系,并分析各坐标之间的相互转换关系:(1)地面坐标系E (OXYZ )地面坐标系用语研究飞机相对于地面的运动,确定飞机在空间的位置坐标X 、Y 、Z ,从而方便研究飞机的姿态、航向以及飞机相对起飞点的空间位置。
该坐标系原点固定于地面上飞机的起飞点,OX 轴指向飞机制定的飞行方向,OZ 轴垂直水平面向上,OY 轴垂直OXZ 平面。
(2)机体坐标系B (Oxyz )机体坐标系固定在机体上,原点设在飞机重心,纵轴Ox 平行于前后旋翼的连线,指向前方为正方向,竖轴Oz 平行于左右旋翼的连线,指向右方为正方向;轴Oy 与轴Ox 、Oz 所在平面垂直,并与轴Ox 、轴Oz 组成右手坐标系。