建立飞行器运动方程
- 格式:pptx
- 大小:743.29 KB
- 文档页数:49
四轴飞行器动力学分析与建模四轴飞行器主要由机架、动力系统、控制系统和传感器系统组成。
机架是整个飞行器的骨架,负责承载各个部件。
动力系统由四个电动马达和四个螺旋桨组成,电动马达通过转动螺旋桨产生升力和推力。
控制系统负责控制飞行器的飞行姿态以及飞行方向。
传感器系统用于获取飞行器的姿态和位置信息。
首先是力学分析。
在飞行过程中,四个螺旋桨产生的升力和推力需要平衡飞行器的重力。
根据牛顿第二定律,可以建立四轴飞行器的运动方程。
假设四轴飞行器在三维空间中的位置为(x, y, z),速度为(vx, vy, vz),质量为m。
则四轴飞行器所受到的合力可以表示为:F = mg - Tm是飞行器的质量,g是重力加速度,T是螺旋桨产生的合力。
根据牛顿第二定律,可以得到四轴飞行器的加速度方程为:a = (mg - T) / m其次是电机模型。
电机模型主要描述电动马达的输出特性。
通常情况下,电动马达的输出转矩与输入电流之间存在一定的关系。
可以使用简化的转矩模型来描述电动马达的输出。
假设电动马达的转矩为Tm,电流为I,转矩模型可以表示为:Tm=k1*I其中k1为电动马达的参数。
接下来是姿态稳定。
四轴飞行器的姿态稳定是实现飞行器平稳飞行的重要问题。
姿态稳定的关键在于对飞行器角度的控制。
通过使用陀螺仪、加速度计和磁力计等传感器获取飞行器的姿态信息,并通过控制系统对飞行器的姿态进行控制。
姿态稳定算法可以根据飞行器的姿态误差来计算所需的控制指令,进而控制飞行器的电动马达来实现姿态的调整。
最后是运动控制。
运动控制主要涉及到飞行器的位置和速度控制。
通常情况下,可以使用位置式控制和速度式控制来实现飞行器的运动控制。
在位置式控制中,通过计算飞行器的位置误差来产生相应的控制指令,控制飞行器的电动马达来实现位置的调整。
在速度式控制中,通过计算飞行器的速度误差来产生相应的控制指令,控制飞行器的电动马达来实现速度的调整。
综上所述,四轴飞行器的动力学分析与建模主要涉及到力学分析、电机模型、姿态稳定和运动控制等方面。

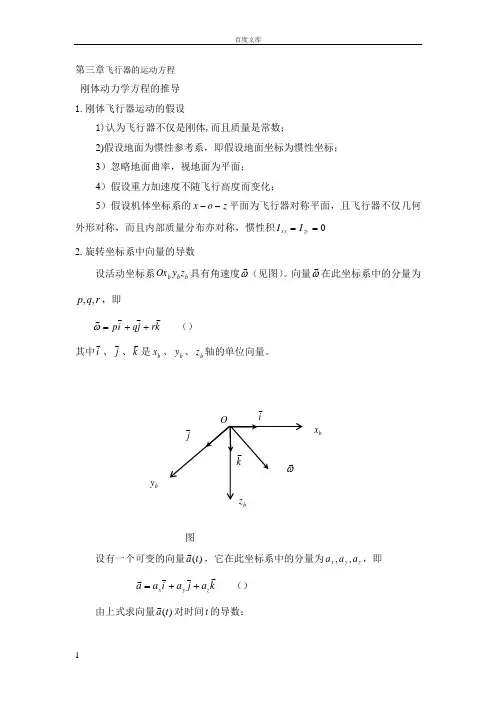
第三章飞行器的运动方程 刚体动力学方程的推导 1.刚体飞行器运动的假设1)认为飞行器不仅是刚体,而且质量是常数;2)假设地面为惯性参考系,即假设地面坐标为惯性坐标; 3)忽略地面曲率,视地面为平面; 4)假设重力加速度不随飞行高度而变化;5)假设机体坐标系的z o x --平面为飞行器对称平面,且飞行器不仅几何外形对称,而且内部质量分布亦对称,惯性积0==zy xy I I 2.旋转坐标系中向量的导数设活动坐标系b b b z y Ox 具有角速度ω (见图)。
向量ω在此坐标系中的分量为r q p ,,,即k r j q i p++=ω () 其中i 、j、k 是b x 、b y 、b z 轴的单位向量。
图设有一个可变的向量)(t a,它在此坐标系中的分量为z y x a a a ,,,即k a j a i a a z y x++= ()由上式求向量)(t a对时间t 的导数:b xωb yb zOijkdtkd a dt j d a dt i d a k dt da j dt da i dt da dt a d z y x z y x +++++= () 从理论力学知,当一个刚体绕定点以角速度ω旋转时,刚体上任何一点P的速度为r dt r d⨯=ω () 其中r是从O 点到P 点的向径。
现在,把单位向量i看作是活动坐标系中一点P 的向径,于是可得:i dtid⨯=ω () 同理可得: j dtj d⨯=ω () k dtkd⨯=ω () 将式()、()及()代入式()中,可得:)(k a j a i a k dtda j dt da i dt da dt a d z y x z y x ++⨯+++=ω () 或写为: a t a dt a d⨯+=ωδδ () 其中k dt da j dt da i dt da t a z y x++=δδ taδδ 称为在活动坐标系中的“相对导数”,相当于站在此活动坐标系中的观察者所看到的向量a 的变化率。
三自由度弹道方程
三自由度弹道方程是描述弹道运动的数学模型,通常用于分析导弹、火箭等飞行器的运动规律。
在弹道学中,我们常常需要考虑弹道飞行器在三维空间中的运动情况,因此引入了三自由度弹道方程。
三自由度弹道方程包括了弹道飞行器在三个方向上的运动状态,分别是水平方向、垂直方向和飞行器自身绕飞行方向的旋转运动。
这三个方向分别对应了三个自由度,通过这些自由度我们可以完整地描述弹道飞行器的运动状态。
在三自由度弹道方程中,我们通常考虑的力学因素包括重力、空气阻力、升力等。
这些因素会影响飞行器的运动轨迹和速度,因此我们需要将它们纳入方程中进行分析。
三自由度弹道方程的推导通常需要考虑飞行器的动力学模型和运动方程。
通过运用牛顿力学和动力学原理,我们可以建立弹道飞行器的运动方程,并通过数值计算方法求解这些方程,得到飞行器的运动轨迹和速度。
三自由度弹道方程在军事、航天等领域具有重要的应用价值,可以帮助我们设计飞行器的飞行轨迹、提高射程和精度,对于导弹、火箭等飞行器的设计和运动控制具有重要意义。
总的来说,三自由度弹道方程是描述弹道飞行器运动的重要数学模型,通过这些方程我们可以深入理解飞行器的运动规律,为飞行器的设计和运动控制提供重要的理论支持。
飞行动力学内容绪论1.1 作用在飞机上的外力1.3 常用坐标系及其转换1.4 飞机质心运动方程小结本章作业1.1;1.2;1.3;1.4;1.5;1.7;1.8;1.9飞行动力学=飞行性能+飞行品质研究飞机的飞行性能和飞行轨迹特性时,可将飞机视为一可控的质点来处理。
可控:是指飞机的飞行轨迹是可以人为改变的,而轨迹的改变取决于作用于飞机上的外力的改变。
质点运动:通过偏转操纵机构,使飞机的合力矩为零;研究飞机的飞行轨迹和飞行性能时可以把飞机视为质点运动。
力矩平衡作为运动的约束条件。
质点系运动:合力矩不为零。
研究飞机飞行品质时将其视为质点系运动。
1.1.1 升阻特性1.1.2 发动机推力从飞行性能的角度,假设操纵面偏转可使力矩平衡,但将其最大平衡能力作为约束。
实际还常忽略操纵面偏转对力平衡的影响。
作用在飞机上的外力?W m g =K K (,,)T V H n J G F W T A =++J J G J G J G K 合外力 外力矩平衡及约束外力一般不通过质心,它将引起绕质心转动的力矩A L D C =++J G J G J G J G L J G D JG W JJ G TJ G 'LJ G 1.1作用在飞机上的外力V K L J G D JG T J G 'L J G W JJ G 重力给定;侧力不计;升力?阻力?发动机推力?重力发动机推力空气动力1.1作用在飞机上的外力在常规飞行性能问题中,假设飞行无侧滑,视侧力为零升力系数阻力系数侧力系数2L L V SC ρ=2D D V SC ρ=2CC V S C ρ=升力和阻力系数主要取决于马赫数、雷诺数、迎角、侧滑角以及飞机的外形马赫数的物理含义?雷诺数的物理含义?迎角的定义?侧滑角的定义?9马赫数:指空气的压缩性效应;低速空气流场不相互影响,高速时则前后相互影响。
9雷诺数:惯性力和粘性力的比值。
¾飞机的尺寸效应;即飞机的尺寸大小会影响飞机的气动特性,一般飞机在真实大气中飞行时,其雷诺数在1000万以上。
航空航天工程师的飞行力学知识航空航天工程师是一个综合性较强的职业,需要具备相关的专业知识和技能。
其中,飞行力学是航空航天工程师所必备的核心知识之一。
本文将介绍航空航天工程师在飞行力学方面需要了解的内容,以及其在工程设计和飞行控制中的应用。
一、飞行原理飞行力学研究的基础是飞行原理。
在航空航天领域,飞行原理包括气动力学、重力学和运动学等方面的知识。
气动力学研究空气对飞机的作用力和运动产生的影响,重力学研究地球引力对飞机的作用力,而运动学则研究飞机的运动状态和路径。
二、飞行力学模型为了研究飞行器的运动,需要建立相应的力学模型。
常用的飞行力学模型有单刚体模型和多刚体模型等。
单刚体模型适用于研究简单、对称的飞行器,如常见的飞机。
多刚体模型适用于研究非对称、复杂的飞行器,如卫星和航天飞机等。
根据实际需求,航空航天工程师可以选择合适的模型进行分析和计算。
三、飞行力学方程为了描述飞行器的运动,需要建立相应的运动方程。
在飞行力学中,最常用的方程是牛顿第二定律和欧拉运动方程。
牛顿第二定律描述了物体的质量和加速度之间的关系,欧拉运动方程描述了物体的力矩和角加速度之间的关系。
通过这些方程,可以计算飞行器在不同飞行状态下的运动轨迹和力学参数。
四、飞行器稳定性与操纵性飞行器的稳定性与操纵性是设计飞行器的重要考虑因素。
稳定性是指飞行器在受到干扰后能够自动恢复到平衡状态的能力,而操纵性是指飞行器在操纵员的控制下能够按照预期进行操纵的能力。
航空航天工程师需要通过飞行力学的知识,设计出满足稳定性和操纵性要求的飞行器结构和控制系统。
五、飞行动力学飞行动力学研究飞行器的动力学特性,包括加速度、速度、高度和姿态等方面的运动。
通过飞行动力学的分析,可以优化飞行器的设计,提高其性能和安全性。
此外,飞行动力学还研究飞行器的机动性能和航迹控制等问题,为飞行员提供飞行操作指导。
六、飞行力学在航空航天工程中的应用飞行力学在航空航天工程中有广泛的应用。
四翼飞行器动力学分析与建模1.引言四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。
这四轴飞行器(Quadrotor)是一种多旋翼飞行器。
四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。
因为它固有的复杂性,历史上从未有大型的商用四轴飞行器。
近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观。
本章通过分析四旋翼直升机的动力学机制,运用已知的物理定律和方程来建立表征系统动态过程的数学模型。
2.四旋翼飞行器简介2.1四旋翼飞行器结构四旋翼直升机主体构成有:产生升力的四个旋翼、飞行控制设备及其支撑旋翼的机身。
有时为了保护飞行器,避免旋翼的损坏,特别装设了保护架。
其中,每个旋翼包括直流电机、翼翅及连接件等部分。
如下图所示:2.2四旋翼飞行器飞行原理四旋翼直升机与传统的直升机相比,有着自己独特的地方。
它的四个呈十字平均分布的旋翼取代了传统的单独的旋翼,对机身产生单独的力和力矩。
四旋翼直升机通过改变旋翼转速来控制飞行器的姿态,且四个旋翼的动态特性高度耦合。
3.四旋翼飞行器动力学方程3.1坐标描述及其转换关系飞机的姿态角、飞行速度的大小和方向等参数总是和坐标系联系在一起的,要确切地描述飞机的运动状态,就要先建立适当的坐标系。
下面定义几种坐标系,并分析各坐标之间的相互转换关系:(1)地面坐标系E (OXYZ )地面坐标系用语研究飞机相对于地面的运动,确定飞机在空间的位置坐标X 、Y 、Z ,从而方便研究飞机的姿态、航向以及飞机相对起飞点的空间位置。
该坐标系原点固定于地面上飞机的起飞点,OX 轴指向飞机制定的飞行方向,OZ 轴垂直水平面向上,OY 轴垂直OXZ 平面。
(2)机体坐标系B (Oxyz )机体坐标系固定在机体上,原点设在飞机重心,纵轴Ox 平行于前后旋翼的连线,指向前方为正方向,竖轴Oz 平行于左右旋翼的连线,指向右方为正方向;轴Oy 与轴Ox 、Oz 所在平面垂直,并与轴Ox 、轴Oz 组成右手坐标系。
内容绪论1.1 作用在飞机上的外力1.3 常用坐标系及其转换1.4 飞机质心运动方程小结本章作业1.1;1.2;1.3;1.4;1.5;1.7;1.8;1.9绪论飞行动力学=飞行性能+飞行品质研究飞机的飞行性能和飞行轨迹特性时,可将飞机视为一可控的质点来处理。
可控:是指飞机的飞行轨迹是可以人为改变的,而轨迹的改变取决于作用于飞机上的外力的改变。
绪论质点运动:通过偏转操纵机构,使飞机的合力矩为零;研究飞机的飞行轨迹和飞行性能时可以把飞机视为质点运动。
力矩平衡作为运动的约束条件。
质点系运动:合力矩不为零。
研究飞机飞行品质时将其视为质点系运动。
1.1.1 升阻特性1.1.2 发动机推力TJ G 从飞行性能的角度,假设操纵面偏转可使力矩平衡,但将其最大平衡能力作为约束。
实际还常忽略操纵面偏转对力平衡的影响。
外力一般不通过质心,它将引起绕质心转动的力矩L J GD JG W JJ G T J G 'L J G 1.1作用在飞机上的外力1.1作用在飞机上的外力在常规飞行性能问题中,假设飞行无侧滑,视侧力为零升力系数阻力系数侧力系数2L L V SC ρ=2D D V SC ρ=2CC V S C ρ=升力和阻力系数主要取决于马赫数、雷诺数、迎角、侧滑角以及飞机的外形马赫数的物理含义?雷诺数的物理含义?迎角的定义?侧滑角的定义?9马赫数:指空气的压缩性效应;低速空气流场不相互影响,高速时则前后相互影响。
9雷诺数:指飞机的尺寸效应;即飞机的尺寸大小会影响飞机的气动特性,一般飞机在真实大气中飞行时,其雷诺数在1000万以上。
这就是研究飞机气动特性时,要建立大尺寸风洞和进行飞行试验研究的原因。
DO1. 升力特性(1)定义升力是飞机上的空气动力的合力在飞机纵向对称平面上垂直于飞行速度方向的分力。
向上为正。
飞机的最大的升力系数约1.2—1.5;采用增升装置后,飞机的最大的升力系数约2.2—3.0。
1. 升力特性0)L L L C αδαα−+升力线斜率,与翼型、机翼平面形状、M 数有关,即~M ,λ, χ零升迎角,取决于机翼有效弯度和M 数,即~M ,f升力部件有翼-身组合体和平尾。