无人机编队队形保持控制器的分散设计方法
- 格式:pdf
- 大小:231.94 KB
- 文档页数:6
无人机编队控制算法与应用研究摘要:无人机编队控制算法与应用是无人机技术领域的前沿研究方向之一。
针对无人机编队控制算法的设计与应用,本文从编队控制算法的基本原理、常见的编队方式以及应用场景等方面进行综述,并展望了未来该领域的研究方向。
关键词:无人机编队控制算法,编队方式,自适应,智能感知,应用场景1. 引言随着无人机技术的不断发展,无人机的应用领域越来越广泛。
无人机编队控制算法是在无人机系统中实现多机协同飞行的关键技术之一。
它能够提高无人机编队飞行的安全性、效率和可靠性,扩展了无人机的应用范围。
2. 编队控制算法的基本原理无人机编队控制算法是基于无人机之间的通信和协同合作实现编队飞行的一种技术。
它借鉴了群体智能和自适应控制的原理,在无人机之间建立通信网络,通过信息交换和共享,实现编队中的任务分工和协同飞行。
3. 常见的编队方式无人机编队控制算法可以实现不同的编队方式,常见的编队方式有队形编队、层次编队和个体编队。
队形编队是指无人机按照特定的几何形状进行排列飞行,如V形编队、直线编队等;层次编队是指将无人机按照不同的层次进行组织,实现任务的分工和协同;个体编队是指无人机通过智能感知和自适应控制,按照环境变化进行动态调整和编队。
4. 编队控制算法的应用场景无人机编队控制算法在多个应用场景中发挥了重要的作用。
在军事领域,它可以实现多机任务协同,提高作战效能和侦察能力;在航空领域,它可以实现无人机编队输送物资和救援行动;在工业领域,它可以实现无人机编队进行巡检和安保等任务。
5. 无人机编队控制算法的挑战与展望虽然无人机编队控制算法已经取得了很大的进展,但还存在一些挑战和问题需要解决。
例如,编队中的通信和信息交换需要高度可靠的系统支持;编队中的决策和控制需要考虑到环境的动态变化等。
未来的研究方向可以包括提高编队算法的自适应性和鲁棒性,进一步完善通信和信息交换系统,探索编队控制算法在更复杂环境下的应用等。
6. 结论无人机编队控制算法是无人机技术领域的研究热点之一。
四旋翼无人机一致性编队飞行控制方法作者:陈杰敏吴发林耿澄浩徐珊来源:《航空兵器》2017年第06期摘要:四旋翼无人机在民用及军用领域都发挥着越来越重要的作用。
为了完成某些特定任务,需要由多架四旋翼组成的编队保持适当队形飞行。
与单架四旋翼执行任务相比,四旋翼编队具有能增加任务成功率、提高整体抗干扰性能、扩大监控范围等优点。
本文基于主从式编队结构,结合信息拓扑理论,把四旋翼编队描述为二阶一致性系统,设计编队控制器来实现四旋翼编队的稳定飞行。
主机和从机均采用PID控制,主机跟踪预设轨迹,从机跟踪编队控制器计算出的轨迹跟踪指令。
最后通过仿真分析了控制算法对四旋翼编队队形生成及队形保持的控制效果。
关键词:四旋翼无人机;编队飞行;信息拓扑理论;一致性理论;主从式编队中图分类号: V249.1 文献标识码: A 文章编号: 1673-5048(2017)06-0025-07[SQ0]0 引言四旋翼无人机(以下简称四旋翼)是一种有四个螺旋桨且螺旋桨分别呈十字交叉型的飞行器。
在过去的数十年中,传感器及电子元器件的微型化、低廉化推动了四旋翼的快速发展。
四旋翼在军事领域可用于巡逻侦察、定点攻击等方面,在民用领域可用于遥感测绘、农业植保、通信中继、航拍航测、短途运输等方面,具有广泛的应用前景和实际用途,成为商业公司和科研单位的研究热点[1]。
随着无线传感网络等技术的创新应用,由多架无人机组成的编队在民用及军事等方面都展现出越来越广泛的用途,如能进行空中集群表演、组建军事通信网络、构建网络化军事打击编队等。
无人机编队飞行,是指在三维空间中,多架无人机按照一定的队形进行排列,使其在飞行过程中保持队形不变或者相对位置在一定范围内变动,并能根据外部情况和任务需求进行动态调整,以保持编队的协同一致性。
无人机编队飞行控制方式主要有主从法[2]、虚拟结构法[3-4]、行为控制法[5-6]等。
主从法结构中,其中一个飞行器被指定为主机,其余飞行器则被指定为从机。
空中飞行器矩阵控制器设计方案摘要:本文基于空中飞行器的需求和设计原则,提出了一种矩阵控制器设计方案。
该方案利用矩阵控制器将多个无人机或有人机编组形成矩阵,并对其进行集中控制、协调操作和路径规划,从而提高飞行器编队的灵活性和整体性能。
本文将详细讨论矩阵控制器的设计、功能划分和算法实现,并对其在空中飞行器编队中的应用进行探讨。
1. 引言空中飞行器编队技术是无人飞行系统研究的一个重要方向,具有广泛的应用前景。
编队研究中一个关键的问题是如何对多个飞行器进行集中控制和协调操作,以实现编组飞行,避免碰撞以及完成各种任务。
矩阵控制器作为一种新颖的控制手段,可以有效地解决这一问题,因此本文提出了一种基于矩阵控制器的设计方案。
2. 矩阵控制器设计原则在设计矩阵控制器时,需考虑以下原则:2.1 灵活性:矩阵控制器需要具备灵活的编队形成能力,能够根据任务需求自由调整编组模式和编队规模。
2.2 鲁棒性:矩阵控制器应对外界环境、随机成分和系统故障具备较高的鲁棒性,确保编组飞行的安全与稳定。
2.3 效率性:矩阵控制器需要高效地进行路径规划和决策,保证飞行器编队的整体性能和效率。
2.4 可扩展性:矩阵控制器应该具备较好的可扩展性,能够适应多种飞行器类型和编队规模。
3. 矩阵控制器设计方案本文提出的矩阵控制器设计方案主要包括以下几个方面:3.1 编组算法:基于无人机之间的通信和相互感知,设计适合不同任务的编组算法,实现自适应编组和双向通信。
3.2 协同控制:利用矩阵控制器进行协同控制,实现飞行器之间的协调操作和数据共享,提高编队飞行的整体性能。
3.3 路径规划:根据任务需求和环境信息,设计高效的路径规划算法,实现编组飞行的路径优化和避障。
3.4 资源管理:对编队中的各个飞行器进行资源管理,合理分配飞行器的能量、通信带宽和计算资源,提高编队飞行的可持续性和适应性。
3.5 任务调度:根据任务优先级和飞行器状态,对编队中的飞行器进行任务调度和指令下发,实现任务的分配和执行。
编队无人机控制方法研究作者:赵银申来源:《环球市场》2019年第06期随着科学技术水平的不断进步,无人飞机慢慢的被人们重视了起来,它相对于载人飞机而言拥有很多优势,例如体积小,使用方便,成本低廉,生存和隐蔽能力强,可保证操作人员生命安全等。
所以在特定的场合,它已经取代载人飞机,执行一些探查,跟踪,电子对抗和协助军事打击等一系列任务,在民用范畴,它也逐渐被开发于勘探地形,抢险救灾,喷洒农药和环境保护等等方面。
目前世界各国都在着力于研发更加成熟和高效的无人机技术应用,无人机编队的发展也日益迅猛。
然而,随着任务复杂度的日益增长,对无人机的要求也越来越高,单个无人机在很多时候都不适合这种任务变化,设备偶然损坏,工作区间狭小,载重量不高和执行任务单一等等问题不断制约着单个无人机的发展。
而解决这些问题的最简单的方法就是采用多个无人机进行编队共同执行任务,就像自然界中的大雁南飞一样。
这样无人机之间可以进行技术互补,飞行范围和工作多样性都进行了大大的提高,如果其中一两个无人机出现了故障,也不会影响到整体无人机的任务目标,其余无人机仍然可以继续完成任务,从而减少因偶然故障因素带来的任务失败风险。
因此,专家们逐渐注意到了无人机编队这一研究方向,希望通过编队飞行的方式来减少这方面的风险。
经过一系列研究发现,编队飞行时由于飞机之间的相互气流作用,可以有效地减少行进间所受到的空气阻力,从而减少飞行过程中的能量消耗。
此外,当无人机在相对密集的队形之下,雷达观测屏上只能检测到无人机存在的信号,并不会展现出每一架无人机的具体信息,因此,这样做能够在军事战争中大大的干扰敌方指挥官的作战判断,实现出奇制胜的战略意图。
美国是现今社会公认的无人机强国,也是最早研究无人机并将其应用于军事领域国家之一。
近些年以美国为主导的局部战争之中不难看出,美国已经发展出了有关于无人机的多种战术体系,成为了无人机应用领域的领头羊,其国内无人机型号琳琅满目,各有所长,是当今无人机界的教科书级范例,这其中就数掠食者无人侦察机和全球鹰军用无人机最为人所知,他们在海湾战争、科索沃和伊拉克等等战争中表现出众,为最后的胜利打下了坚实的信息基础。
无人机集群的编队控制研究无人机已经成为当今世界中极为热门的技术之一。
随着无人机技术的不断发展和应用,无人机的使用范围也越来越广泛,如军事侦察、搜救、气象监测等领域。
而无人机集群作为无人机应用领域中的一个重要组成部分,也正在逐步展现出其巨大的潜力和应用前景。
同时,对于无人机集群的编队控制研究也成为了无人机技术研究中极为重要的一部分。
无人机集群编队控制技术在无人机编队控制系统中具有重要的地位。
它主要实现无人机之间的通信和信息共享,有效提高了整个无人机系统的工作效率和安全性。
目前,针对无人机集群编队控制技术,学者们已经研究出了多种理论方法和应用模型,如控制理论、优化理论、演化算法等等。
但是,针对无人机集群编队控制技术的研究还存在不少问题和挑战,高效、可靠的编队控制系统始终是无人机集群技术研究的核心问题。
在无人机集群编队控制技术中,控制理论具有十分重要的作用。
其中PID控制算法、模糊控制和强化学习控制算法等被广泛应用。
PID控制算法基于反馈控制原理,能够有效地消除编队中无人机之间的误差,提高了编队的精度和可靠性;而模糊控制方法是一种基于模糊数学的控制方法,具有较强的鲁棒性和适应性,但需要花费较长的时间进行模糊规则库的设计和分析。
强化学习控制算法则是一种基于智能算法的方法,通过智能算法优化目标函数,最终得到理想的编队控制模型,具有极高的可扩展性和适应性。
在上述方法中,根据实际情况选取适合的方法,才能更加有效地解决编队控制问题。
除了以上控制方法,集群编队控制技术中的路径规划方法也是十分重要的。
路径规划方法主要用来计算无人机的最优路径,指导无人机向目标方向运动。
常见的路径规划方法有A*算法、Dijkstra算法,经过优化后高效性能较好。
同时,集群编队中的无人机能够通过传感器获取周围环境信息,将其与路径规划算法相结合,可以实现更加精准的路径规划和目标控制。
在无人机集群编队控制中,合理路径规划能够较好的保障整个编队安全性和集群效率。
基于多智能体系统的无人机编队控制算法研究近年来,无人机技术得到了快速发展,已经广泛应用于军事、民用、商业等领域。
在无人机的应用场景中,编队飞行是非常重要的问题。
通过编队飞行,无人机之间可以相互协作,以实现更加灵活和高效的任务完成,例如巡逻、搜救、航拍等。
因此,无人机编队控制算法是现代无人机系统设计中的重要问题。
传统的无人机编队控制算法主要是基于集中式系统或分布式系统。
在集中式系统中,所有无人机通过交换信息与中央决策者通信,由中央决策者规划和指导航行。
在分布式系统中,每个无人机都具有一定程度的决策权,通过互相通信和协作,完成编队飞行任务。
但是,这些传统算法存在一些缺点,如限制了系统的灵活性、易受单点故障影响、无法解决大规模编队控制等问题。
为了克服这些缺点,基于多智能体系统的无人机编队控制算法开始受到重视。
多智能体系统是一种由数个智能体组成的集合体,智能体之间通过局部信息交换,以达成集体目标的系统。
在多智能体系统中,智能体之间具有较大的自治性和合作关系,能够实现自组建、自适应等特点,非常适合用于无人机编队控制。
基于多智能体系统的无人机编队控制算法通常包括以下几个关键问题:1.编队形成问题编队形成是指将多个无人机组合成一个编队,并确定每个无人机在编队中的位置和角色。
编队形成通常有两种方式:直线队列和V字队列。
在直线队列中,无人机按照直线排列。
在V字队列中,无人机按照V字型排列,以便于观察和控制。
对于编队形成问题,多智能体系统通常采用协议和机制来以分布的方式实现。
2.动态路径规划问题动态路径规划是指动态生成路径,将编队从起点移动到终点,并且避免与其他无人机的碰撞。
在动态路径规划中,需要考虑多种因素,例如无人机的速度、航向、障碍物、风力、地形等。
对于动态路径规划问题,多智能体系统通常采用避障算法和控制算法来实现,可以实现高效和安全的路径规划。
3.控制器设计问题控制器是无人机编队控制系统的重要组成部分,它决定了无人机的运动特性和运动轨迹。
四旋翼无人机的编队飞行控制系统设计徐俊,王茂森,戴劲松,王大鹏(南京理工大学机械工程学院,江苏南京210094)来稿日期:2017-10-24作者简介:徐俊,(1991-),男,江苏扬州人,硕士研究生,主要研究方向:嵌入式系统控制;王茂森,(1970-),男,江苏南通人,博士研究生,硕士研究生导师,副教授,主要研究方向:机器人传感与智能控制1引言近年来无人机(UAV )编队飞行已经成为智能控制领域的一个研究热点。
无人机编队飞行,即多架无人机进行某种队形排列组织模式和任务分配的组织模式以适应任务的要求,它既包括队形的产生,保持和变化,也包括飞行任务的规划和组织[1]。
多UAV 编队飞行可以弥补单个无人机执行任务效率低,安全冗余差等缺点,可以执行通讯中继、高精度定位对地攻击、多角度3维立体成像等复杂任务[2]。
通过多无人机的协作,无人机组群飞行有效的延伸无人机的任务执行范围,增强了任务的执行效能和冗余保障,其综合性能与单机相比成几何级的增强,应用范围和任务使命都有了拓展。
国内目前对无人机编队飞行的研究基本上聚集在协同控制方法的研究和实验室仿真阶段。
例如文献[3]对多飞行平台分散化协同控制系统结构以及分散化的规划等技术问题进行了深入研究。
文献[4]提出了一种分布式编队控制器的分散化设计方法,并进行了仿真实验。
在提出了一种基于GPS 坐标控制的编队算法并对算法进行了实验验证。
搭建了稳定的多节点无线通讯链路,解决了数据冲撞以及干扰问题。
最后对无人机群规划的路径和实际飞行路径进行了比较以及对各部分硬软件进行测试,从而验证本系统的精确性和稳定性和可行性。
2编队飞行控制系统总体设计编队飞行控制系统设计主要分为一下几个部分:一是无人机端的飞行控制系统设计,二是无线通讯链路的搭建。
三是编队算法的实现。
2.1控制系统任务规划地面站主要负责整个系统的统筹管理,包括队形目标函数的产生,各个目标航点的计算,对各架无人机的状态包括姿态、高度、速度、位置等的监测。
第29卷增刊 2008年 5月 航空学报
ACTA AERONAUTICA ET ASTRoNAUTICA SINICA Vo1.29 Sup
May 2008
文章编号:1000—6893(2008)增一0S55—06
无人机编队队形保持控制器的分散设计方法
何真,陆宇平 (南京航空航天大学自动化学院,江苏南京210016) Decentralized Design Method of U Formation Controllers for Formation Keeping He Zhen,Lu Yuping (College ofAutomation Engineering,Nanjing University ofAeronantics and Astronautics, Nanjing 210016.China)
摘要:针对无人机编队中邻近无人机的数学模型相互耦合的特性,提出了一种分布式编队队形保持控制器 的分散设计方法。将无人机编队模型分解成解耦部分和关联部分。对解耦部分直接使用鲁棒控制方法设计控 制器,对关联部分采用改进的关联系统分布式控制方法设计控制器。将两个控制器结合起来,控制无人机编 队飞行。仿真结果表明:该控制器可以控制无人机编队,在定常运动和机动过程中,都能收敛到期望队形,并 且对外界干扰具有一定的鲁棒性。控制器设计过程是分散的,涉及的计算的维数和单个无人机模型的维数相 当,具有运算量小的优点。 关键词:无人机;编队控制;分布式控制;关联系统;解耦 中图分类号:V279;TP273 文献标识码:A Abstract:The models of neighboring aircrafts in an unmanned aerial vehicle(UAV)formation are coupled.To han— die this kind of coupling,a decentralized design method of distributed controllers for formation keeping is presented. The model of a UAV formation is decomposed into the decoupled part and the interconnected part.The controller of the decoupled part is designed directly by conventional robust control method.The controller of the interconnected part is designed according to the improved distributed control method of interconnected systems.The two controllers are combined to control the formation flight of the UAV.Simulation results show that,under both constant speed situations and maneuvering situations,the UAV formation with the designed controller converges to its desired for- mation,and is robust to disturbances.The controller’S design process is decentralized,and the calculation dimension is in the scale of the dimension of a single UAV mode1.Therefore,the computational burden is low. Key words:UAV;formation control;distributed control;interconnected system;decouple
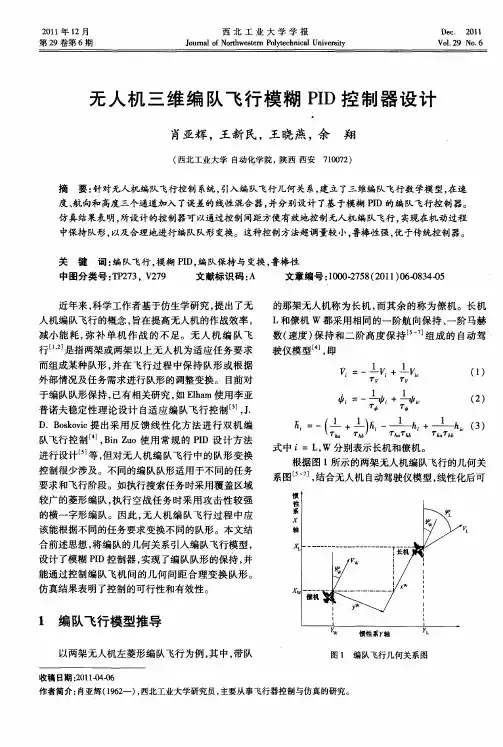
在不少应用场合,无人机编队具有单架无人 机无法比拟的优势。采用无人机编队代替单个无 人机执行危险的任务,可以提高任务的成功率; 多无人机近距离编队飞行可以节省能量 。无人 机编队飞行问题引起了越来越多的研究者们的 兴 。 无人机编队飞行采用分布式控制方式,具有 易于实现、通信量小和可靠性高等优点 。分布 式编队飞行控制成为研究热点。虽然通常的分布 式编队控制器的结构是分布式的,但是在其设计 过程中,需要针对队列的整个模型进行计算,计 收稿日期:2007-09-12;修订日期:2007—12—24 基金项目:国家自然科学基金(90605007);南京航空航天大学博士 生创新基金(BCXJ06-08) 通讯作者:何真E—mail:hezhen@nuaa.edu.ca 算量大,且无人机个数越多,计算量越大。本文 提出了一种无人机分布式队形保持控制器的分散 设计方法。该设计方法利用单个无人机模型的参 数来设计控制器,其计算过程涉及的矩阵维数与 单个无人机模型的维数相当,而与编队中无人机 的个数无关,具有计算量小的优点。
1无人机编队的模型 考虑由r个无人机组成的队列。由文献[1O一 12],定义长机和僚机误差变量分别为
P =z 一 I;I 2 …
维普资讯 http://www.cqvip.com 航空学报 第29卷 其中:z ,z ,i {1,2,…,,.},分别为第i个无人 机的位置直角坐标和速度直角坐标;cf,i∈{1,2, ,.一1}为第i个无人机与第i+1个无人机之间的 期望距离;vd为无人机的期望速度。 无人机队列的动力学模型为
从式(1)可见,无人机队列的数学模型中,相 邻无人机的误差变量是耦合的。若采用传统的设 计方法,针对整个队列设计编队运动控制器,则 设计过程中计算量大,而且随着无人机个数 的 增加,计算量迅速增大。本文提出了一种无人机 队形保持控制器的分散设计方法。
2无人机编队队形保持控制器的分散设计
2.1关联系统的分布式控制 参考文献[13]中的关联系统模型,针对本文 的研究对象对其进行修改,考虑如下关联系统
班] (2)
式中:Xf∈R ;X f∈R 为第f个子系统向第 1个子系统输出的关联变量;X ∈Rms为第 i一1个子系统向第i个子系统输入的关联变量, 与X。 之间的关系为Xi =Xout-j1;zf为被调输
出;d 为扰动;Art,ATs等矩阵为第i个子系 统数学模型的系数;下标中的T表示该系数与 X 有关(而X 只与时间有关);下标中的S表示 该系数与关联变量 。 和Xi 相关(表示各个子 系统之间在空间上的关系)。图1为各个系数矩 阵的数学逻辑方框图。 做变量替换: “=(Xo “一Xin)/√2,i
(Xo “+Xin)/√2,获得式()的新表达方i 2
式为
雕 ]
T= T+ Ts(J—Ass)~AsT
第i个子系统 第i个子系统 与第i+1个 子系统的关联
图1 关联系统系数矩阵的数学逻辑方框图 Fig.1 Logic block diagram ofparameter matrices in the interconnected system
ATS=一42ATs(J—Ass)。。 BT=BT+ATs(J—Ass)。‘ AsT=,/2(i—Ass)。。 T Ass=(I一 s) (一I~Ass) Bs=42(I~Ass)。。 = +Cs(J—Ass)。。 T Cs=一√2cs(J—Ass)。。 J['=J['+Cs(J—Ass)。。 s 其中:,为单位矩阵。 可以得到保证该系统稳定的定理如下: 定理 式(3)描述的系统是稳定的,并且 Io艺Ilzi12d,/ 艺114I dt<,,2,如果存在矩
+ X 一71 c D —yI <0
式中:~ [ ]。 证明:定义候选Lyapunov函数:
r 3 2 ∈ Ⅱ, 一 = = = Ⅱ I Ⅱf . . . —....................,............L = ]●●●●●●●●●J
—....................,............L
维普资讯 http://www.cqvip.com 增刊 何真等:无人机编队队形保持控制器的分散设计方法 ∑xr ̄Xvx 根据Schur定理,式(4)等价为: J:J7/C—D一] [ ]0B X =l+l l‘l C D l< I 一,,J l L L
通过计算得到: ∑[ X—i , ] t,[ 墨 , di]= ∑Wx + 一∑ I 一 ∑ ll + ∑( -。Tul’f 墨 + -|n1T fXsX—out, ) 因为X—out(
Xin
)/√ ,
( 州, +
Xin’f)/ ,且 f= _1,所以
因此 ∑( -。Tm√ i ,f+‰-T,f , )= i=--- ̄
∑( -。Tm√XsX—o 一 -iTn, XsX—in, )=0
+ 一·艺I1 ̄/112-r∑-I-oo : i=--- ̄ i=--- ̄ ∑-boo[ X—i ] X—i ]<0
i=--or 当di=0时,可以得到 <0;
当系统初始状态为0时, 可以得到 艺llZi12d,/ 艺 ll df< 。定理得证。
下面为这类系统设计状态反馈控制器,考虑 系统:
『 f] I l l= L- z J
畿 鸽 c c 硝 曼 品 鹕D
考虑到本文对象的实际情况,令武=0。将 状态反馈控制器Ⅳf=Kx ,代入式(5),将其整理为 式(3)的形式,得到:
B-g 西 c (6)
式中: =碍+ ;CX=砰+ K,而
c 以及式(6)00其他参数与式(3)中对应参 数的计算公式在形式上一样,只需将这些计算公 式右边的参数换作式(5)中对应的参数即可。 针对该系统,对上述定理使用鲁棒控制中的 变量替换法¨ ,即可获得满足定理条件的状态
反馈控制器,使得系统稳定且对干扰有一定的鲁 棒性。
2.2无人机编队队形保持控制器设计 2.1节的定理具有一定的保守性,若将其直 接用于式(1)表示的无人机编队系统,无法求解。 因此,先对无人机编队系统的模型进行处理。
令 = 1 U +1
1 U—— S+1
r/ = , =0,代入
式(1)得到速度控制部分(即为关联部分)
由式(1)可得, = 一 = H一Ⅳj,令 △Ⅳl=ⅣfⅣf,得到位移控制部分(即为解耦部分)