无人机编队队形变换
- 格式:docx
- 大小:1.20 MB
- 文档页数:2
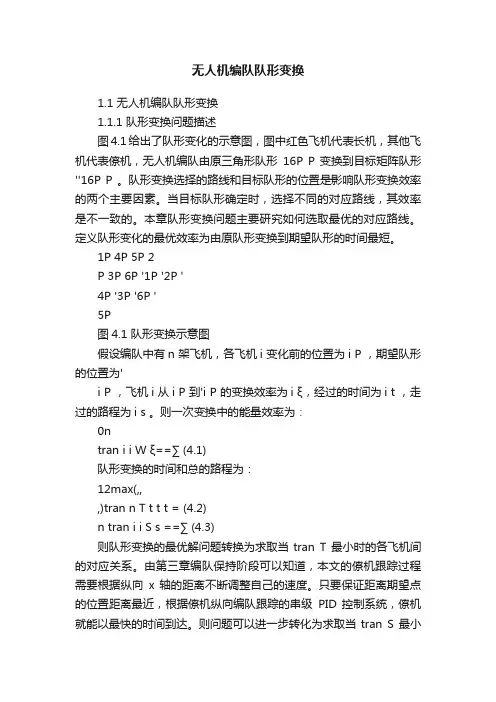
无人机编队队形变换1.1 无人机编队队形变换1.1.1 队形变换问题描述图4.1给出了队形变化的示意图,图中红色飞机代表长机,其他飞机代表僚机,无人机编队由原三角形队形16P P 变换到目标矩阵队形''16P P 。
队形变换选择的路线和目标队形的位置是影响队形变换效率的两个主要因素。
当目标队形确定时,选择不同的对应路线,其效率是不一致的。
本章队形变换问题主要研究如何选取最优的对应路线。
定义队形变化的最优效率为由原队形变换到期望队形的时间最短。
1P 4P 5P 2P 3P 6P '1P '2P '4P '3P '6P '5P图4.1 队形变换示意图假设编队中有n 架飞机,各飞机i 变化前的位置为i P ,期望队形的位置为'i P ,飞机i 从i P 到'i P 的变换效率为i ξ,经过的时间为i t ,走过的路程为i s 。
则一次变换中的能量效率为:0ntran i i W ξ==∑ (4.1)队形变换的时间和总的路程为:12max(,,,)tran n T t t t = (4.2)n tran i i S s ==∑ (4.3)则队形变换的最优解问题转换为求取当tran T 最小时的各飞机间的对应关系。
由第三章编队保持阶段可以知道,本文的僚机跟踪过程需要根据纵向x 轴的距离不断调整自己的速度。
只要保证距离期望点的位置距离最近,根据僚机纵向编队跟踪的串级PID 控制系统,僚机就能以最快的时间到达。
则问题可以进一步转化为求取当tran S 最小时的各飞机间的对应关系。
假设队形变换在无障碍物情况下进行变换,则i P 到'i P 时的直线路径最短,最后可以将队形变化最优解问题简化为指派问题。
编队中有n 架飞机,则共有n n ?中对应关系。
若最优的对应方法为'(,)i i J P P 。
则其数学表达式为:'12(,)min(,,,)n n i i tran tran tran J P P S S S ?= (4.4) 1.1.2 匈牙利算法的应用匈牙利算法又名为Munkres 分配算法,该算法最早由匈牙利数学家Dénes K?nig 和Jen?Egerváry 提出[59]。
![多无人机队形变换方法及系统[发明专利]](https://uimg.taocdn.com/5e5797da951ea76e58fafab069dc5022aaea4681.webp)
专利名称:多无人机队形变换方法及系统专利类型:发明专利
发明人:邢娜,王月海,尹文杰,邢志强,庞枫骞申请号:CN202210025528.9
申请日:20220111
公开号:CN114326826A
公开日:
20220412
专利内容由知识产权出版社提供
摘要:本发明涉及一种多无人机队形变换方法及系统,属于无人机队形变换领域。
先建立适用于多无人机队形变换的马尔科夫决策模型,然后采用深度强化学习计算马尔科夫决策模型的最优解,在计算过程中,采集其他障碍物的状态以及动作信息并为其计算注意力分数,分数越高的障碍物无人机本体路径的影响越大,无人机本体在下一步动作选择中要关注此障碍并注意躲避,从而有效减小了无人机之间的碰撞发生几率。
申请人:北方工业大学
地址:100144 北京市石景山区晋元庄路5号
国籍:CN
代理机构:北京高沃律师事务所
代理人:刘芳
更多信息请下载全文后查看。
![一种分布式无人机编队队形变换方法[发明专利]](https://uimg.taocdn.com/622dbe17492fb4daa58da0116c175f0e7cd119fa.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011116122.9(22)申请日 2020.10.19(71)申请人 中国空气动力研究与发展中心地址 621000 四川省绵阳市二环路南段6号(72)发明人 马跃 毛仲君 贾涛 叶德章 汪华松 徐海航 (74)专利代理机构 重庆市信立达专利代理事务所(普通合伙) 50230代理人 陈炳萍(51)Int.Cl.G05D 1/10(2006.01)(54)发明名称一种分布式无人机编队队形变换方法(57)摘要本发明公开了一种分布式无人机编队队形变换方法,涉及无人机飞行技术领域,解决队形变换信息传输的通信开销高、可靠性低问题以及分布式队形同步问题,增强分布式编队队形变换的安全性,具体方案为:包括以下步骤:S1:在所有无人机上预设所有队形的相关指令,并按照队形的数量进行依次编号;S2:通过控制站向所有无人机发送需要变换的队形的编号信号;S3:所有无人机接收到S2中的编号信号,按照S1中无人机自身的指令,自动生成一架长机,其余无人机为僚机;S4:长机按照自身的指令调整自身的位置,所有僚机以长机为基准,结合自身的指令调整自身的位置。
本发明采用指令编号映射队形的思想,可大幅降低直接发送队形矩阵带来的通信开销。
权利要求书1页 说明书4页 附图2页CN 112099531 A 2020.12.18C N 112099531A1.一种分布式无人机编队队形变换方法,其特征在于,包括以下步骤:S1:在所有无人机上预设所有队形的相关指令,并按照队形的数量进行依次编号;S2:通过控制站向所有无人机发送需要变换的队形的编号信号;S3:所有无人机接收到S2中的编号信号,按照S1中无人机自身的指令,自动生成一架长机,其余无人机为僚机;S4:长机按照自身的指令调整自身的位置,所有僚机以长机为基准,结合自身的指令调整自身的位置。
无人机编队机动飞行时的队形保持反馈控制
邵壮;祝小平;周洲;王彦雄
【期刊名称】《西北工业大学学报》
【年(卷),期】2015(000)001
【摘要】为提高编队大机动时的队形保持能力,采用虚拟结构编队方法,基于李雅普诺夫直接法设计独立的非线性队形保持控制器,并在此基础上采用非线性模型预测控制方法设计含队形反馈的编队轨迹跟踪器。
通过在代价函数中引入队形误差代价来实现队形反馈控制策略,并采用动态参数实现编队队形保持和沿参考轨迹飞行之间的自适应切换,各无人机通过滚动求解有限时域优化问题得到虚拟结构的控制指令。
仿真结果表明,相较于无队形反馈的情况,所设计的含队形反馈轨迹跟踪器能够显著地降低编队大机动时的队形保持误差。
【总页数】7页(P26-32)
【作者】邵壮;祝小平;周洲;王彦雄
【作者单位】西北工业大学无人机特种技术重点实验室,陕西西安 710065;西北工业大学无人机研究所,陕西西安 710065;西北工业大学无人机特种技术重点实验室,陕西西安 710065;西北工业大学无人机特种技术重点实验室,陕西西安710065
【正文语种】中文
【中图分类】V249
【相关文献】
1.无人机编队队形保持变换控制器设计 [J], 邓婉;王新民;王晓燕;肖亚辉
2.多无人机编队队形选择和优化 [J], 唐悦;李聪;黄长强;王勇
3.基于人机合作的有人/无人机编队队形变换策略 [J], 吴立尧; 韩维; 张勇; 熊瑶
4.多旋翼无人机编队队形变换算法研究 [J], 赵凌楚
5.小型无人机编队队形保持与重构算法设计 [J], 齐阖荣;张民;姚洪斌
因版权原因,仅展示原文概要,查看原文内容请购买。
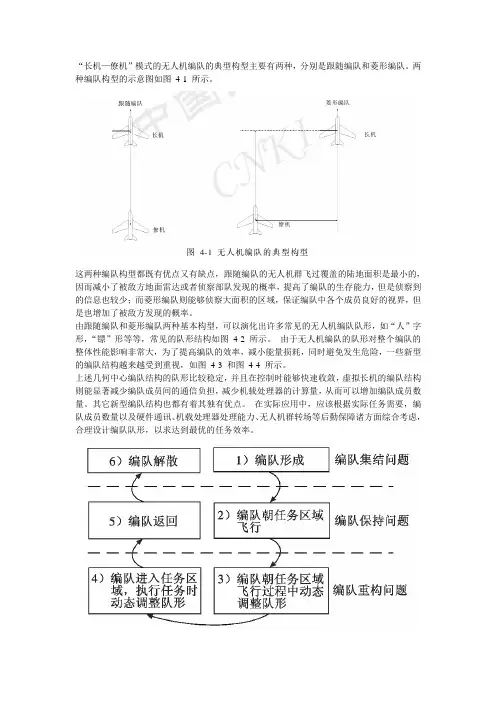
“长机—僚机”模式的无人机编队的典型构型主要有两种,分别是跟随编队和菱形编队。
两种编队构型的示意图如图4-1 所示。
这两种编队构型都既有优点又有缺点,跟随编队的无人机群飞过覆盖的陆地面积是最小的,因而减小了被敌方地面雷达或者侦察部队发现的概率,提高了编队的生存能力,但是侦察到的信息也较少;而菱形编队则能够侦察大面积的区域,保证编队中各个成员良好的视界,但是也增加了被敌方发现的概率。
由跟随编队和菱形编队两种基本构型,可以演化出许多常见的无人机编队队形,如“人”字形,“镖”形等等,常见的队形结构如图4-2 所示。
由于无人机编队的队形对整个编队的整体性能影响非常大,为了提高编队的效率,减小能量损耗,同时避免发生危险,一些新型的编队结构越来越受到重视,如图4-3 和图4-4 所示。
上述几何中心编队结构的队形比较稳定,并且在控制时能够快速收敛,虚拟长机的编队结构则能显著减少编队成员间的通信负担,减少机载处理器的计算量,从而可以增加编队成员数量。
其它新型编队结构也都有着其独有优点。
在实际应用中,应该根据实际任务需要,编队成员数量以及硬件通讯、机载处理器处理能力、无人机群转场等后勤保障诸方面综合考虑,合理设计编队队形,以求达到最优的任务效率。
无人机群智能编队控制及路径规划方法无人机群智能编队控制及路径规划方法无人机群在现代应用中扮演着越来越重要的角色,无论是在事领域还是在民用领域,如环境监测、物流运输、灾难救援等。
智能编队控制和路径规划是无人机群应用中的关键技术,它们直接影响到无人机群的效率、安全性和任务完成的成功率。
本文将探讨无人机群智能编队控制及路径规划的方法。
一、无人机群编队控制概述无人机群编队控制是指通过控制算法,使多架无人机按照预定的队形和规则进行协同飞行。
编队控制不仅要求每架无人机能够飞行,还要求它们能够根据环境变化和任务需求进行动态调整。
编队控制的核心问题包括队形保持、队形变换、队形重构和队形优化等。
1.1 编队控制的基本原理编队控制的基本原理是通过设计控制律,使得无人机群能够根据领导者的指令或者预设的规则进行协同飞行。
这通常涉及到领导者-跟随者模型、虚拟结构模型和行为模型等不同的控制策略。
1.2 编队控制的关键技术编队控制的关键技术包括队形设计、队形稳定性分析、队形调整策略和队形优化算法。
队形设计需要考虑无人机的动力学特性和任务需求,设计出合理的队形结构。
队形稳定性分析则需要评估在不同环境和干扰下,编队能否保持稳定。
队形调整策略和优化算法则用于在飞行过程中对队形进行动态调整,以适应任务需求和环境变化。
二、无人机群路径规划方法路径规划是无人机群飞行中的一个重要环节,它涉及到从起点到终点的最优或可行路径的选择。
路径规划需要考虑多种因素,如飞行安全、飞行时间、能耗、避障等。
2.1 路径规划的基本原则路径规划的基本原则是确保无人机群能够安全、高效地从起点飞到终点。
这通常需要在满足飞行安全和任务需求的前提下,尽可能减少飞行时间和能耗。
2.2 路径规划的关键技术路径规划的关键技术包括环境感知、路径搜索算法、避障策略和多无人机协同规划。
环境感知技术用于获取无人机周围环境的信息,为路径规划提供依据。
路径搜索算法则用于在已知环境中搜索最优或可行的飞行路径。
1.1 无人机编队队形变换
1.1.1 队形变换问题描述
图4.1给出了队形变化的示意图,图中红色飞机代表长机,其他飞机代表僚机,无人机编队由原三角形队形16P P 变换到目标矩阵队形''16P P 。
队形变换选择的路线和目标队形的位置是影响队形变换效率的两个主要因素。
当目标队形确定时,选择不同的对应路线,其效率是不一致的。
本章队形变换问题主要研究如何选取最优的对应路线。
定义队形变化的最优效率为由原队形变换到期望队形的时间最短。
1P 4P 5P 2
P 3P 6P '1P '2P '
4P '3P '6P '
5P
图4.1 队形变换示意图
假设编队中有n 架飞机,各飞机i 变化前的位置为i P ,期望队形的位置为'
i P ,飞机i 从i P 到'i P 的变换效率为i ξ,经过的时间为i t ,走过的路程为i s 。
则一次变换中的能量效率为:
0n
tran i i W ξ==∑ (4.1)
队形变换的时间和总的路程为:
12max(,,
,)tran n T t t t = (4.2)
n tran i i S s ==∑ (4.3)
则队形变换的最优解问题转换为求取当tran T 最小时的各飞机间的对应关系。
由第三章编队保持阶段可以知道,本文的僚机跟踪过程需要根据纵向x 轴的距离不断调整自己的速度。
只要保证距离期望点的位置距离最近,根据僚机纵向编队跟踪的串级PID 控制系统,僚机就能以最快的时间到达。
则问题可以进一步转化为求取当tran S 最小时的各飞机间的对应关系。
假设队形变换在无障碍物情况下进行变换,则i P 到'i P 时的直线路径最短,最后可以将队形变化最优解问题简化为指派问题。
编队中有n 架飞机,则共有n n ⨯中对应关系。
若最优的对应方法为'
(,)i i J P P 。
则其数学表达式为:
'12(,)min(,,,)n n i i tran tran tran J P P S S S ⨯= (4.4) 1.1.2 匈牙利算法的应用
匈牙利算法又名为Munkres 分配算法,该算法最早由匈牙利数学家Dénes Kőnig 和Jenő
Egerváry 提出[59]。
该算法可以用于解决指派问题,最坏情况下运行的时间复杂度为()3
O n 。
匈牙利算法的问题描述为:有n 工人和n 任务,每个任务只能分配给一个工人,每个工人去执行不同任务所需的费用不一样。
如何分配使得总费用最小。
匈牙利算法的输入为效益矩阵n n A ⨯,输入矩阵必须为方阵。
该算法包括以下四个步骤。
前两个步骤执行一次,而步骤3和步骤4重复执行,直到找到最佳分配:
步骤1:遍历矩阵中的所有行,找到每一行的最小值,然后在对应行中将所有元素减去对应的最小值。
步骤2: 遍历矩阵中的所有列,找到每一列的最小值,然后在对应列中将所有元素减去对应的最小值。
步骤3:使用尽可能少的标记线覆盖效益矩阵中的全部零元素。
如果需要n 行,则零元素表示最佳分配的对应元素。
算法停止。
如果需要少于n 行,请继续执行步骤4。
步骤4:在步骤3中找到一条线未覆盖的最小元素(称为k)。
从所有未发现的元素中减去k ,并将k 添加到所有覆盖两次的元素中。
返回步骤3。
从上述的分析知道,只要能构造出效益矩阵,便能运行上面四个步骤求解到最优的分配序列。
现将该算法应用到实际的编队队形变换中,定义最大效益为让编队在执行队形变换前后,各无人机飞行的路径总和最短。
假设在原编队中第i 架飞机与期望编队队形中第j 架飞机的距离为ij s 。
则效率矩阵可以表示为:
11
11n n n n nn
s s A s s ⨯=
(4.5) 考虑到编队队形保持阶段,所有僚机都以长机作为基点且长机处于自动模式。
如果原队形中的长机分配到目标队形中的僚机,可能会造成编队队形很长时间才能收敛,而且涉及到编队内飞机之间的模式和角色切换,增加了编队稳定飞行的难度。
因此本文决定,长机之间的指派方式固定,以图4.1为例,长机的对应关系为'11P P →,长机还是作为目标编队中的长机。
这样只需将-1n 僚机之间构成效益矩阵即可。
式(4.5)变成: 11
1(1)(-1)(-1)(1)1
(1)(1)
n n n n n n s s A s s -⨯---=
(4.6)。