无人机编队飞行的自适应控制设计
- 格式:pdf
- 大小:1.03 MB
- 文档页数:8
无人机飞行器的自主控制及路径规划技术随着科技的发展和人类对越来越多的智能化需求,无人机飞行器作为一项先进的技术,正日益成为人们探索、保护、娱乐和商业等领域的重要工具。
但是,无人机的普及也面临着一些问题,如控制、飞行安全等。
而无人机飞行器的自主控制及路径规划技术便是解决这些问题的重要手段之一。
本文将重点介绍无人机飞行器的自主控制及路径规划技术,并对其未来发展进行展望。
一、无人机飞行器自主控制技术无人机飞行器的自主控制技术是指能够实现飞行器在没有人为干预的情况下,完成飞行任务的技术。
而要实现无人机的自主控制,首先就需要实现对其飞行状态的准确感知。
无人机一般都配备了多种传感器,如GPS、惯性测量单元、视觉传感器等,以精确地感知其位置、速度、姿态等信息。
其次,无人机飞行器需要实现自主的飞行控制。
飞行控制系统一般包括姿态控制和位置控制两部分。
姿态控制是指飞行器在空间中的旋转控制,通常采用PID (比例积分微分)控制器实现。
位置控制则是指飞行器在空间中位置的控制,通常采用定高定点控制器来实现。
最后,无人机飞行器还需要实现智能决策和避障能力。
智能决策是指根据任务要求,自主选择最佳飞行路径和执行策略的能力。
而避碍能力则是指在遇到障碍物时,无人机能够自主规避,避免发生碰撞等意外情况。
二、无人机飞行器路径规划技术无人机的路径规划技术是指在给定的环境中,通过算法计算出最佳飞行路径的技术。
路径规划技术对于确定无人机的飞行路线和轨迹非常重要,它能够通过算法和模拟分析,在飞行中进行质量控制和避障处理,从而极大地减轻驾驶员的工作压力,提高任务完成的成功率。
在无人飞行器路径规划技术中应用比较广泛的一个算法是A*算法。
A*算法通过启发式搜索找出最短路径,可以实现无人机自主计算路径,并通过飞行控制系统实现路径跟踪。
随着人工智能技术的不断发展,机器学习技术为无人机的路径规划和飞行控制带来了新的可能性。
无人飞行器的路径规划本质上是一个决策问题,而机器学习正是基于数据的决策模型。
无人机飞行控制中的自适应控制算法研究无人机技术的快速发展为航空领域带来了巨大的变革。
无人机的飞行控制是确保其安全、稳定和高效操作的关键因素。
在无人机飞行控制中,自适应控制算法发挥着重要作用。
本文将对无人机飞行控制中的自适应控制算法进行研究和探讨。
首先,我们需要了解什么是自适应控制算法。
自适应控制算法是一种能够根据系统的动态特性自动调整控制器参数的控制方法。
在无人机飞行控制中,自适应控制算法可以根据飞行状态的变化动态调整控制策略,以实现对无人机飞行过程中的各种干扰和障碍的适应性响应。
无人机飞行控制中的自适应控制算法有多种形式。
一种常见的自适应控制算法是模型参考自适应控制(MRAC)。
MRAC算法通过将无人机系统建模为一个可调整的参考模型和一个未知的系统模型,并不断调整参考模型参数来逼近系统模型,以实现对无人机飞行状态的控制。
另一种常见的自适应控制算法是自适应滑模控制(ASMC)。
ASMC算法利用滑模原理和自适应调节机制来实现对无人机飞行过程中的干扰和不确定性的补偿。
它通过引入滑模面来实现对误差的控制,并通过自适应机制来调整滑模面的参数以适应不确定性因素。
除了以上两种算法,还有一些其他的自适应控制算法在无人机飞行控制中也得到了广泛的研究和应用。
例如,基于模式识别的自适应控制算法利用人工智能技术和模式识别算法来实现对无人机飞行状态的准确识别和预测,并根据识别结果进行自适应控制策略调整。
自适应控制算法在无人机飞行控制中的应用具有多个优势。
首先,它能够提高无人机的适应性和鲁棒性,使其能够应对各种飞行环境和复杂气象条件。
其次,自适应控制算法能够有效地抑制飞行过程中的各种干扰和障碍对无人机性能的影响。
最后,自适应控制算法还可以提高无人机的控制精度和飞行能力,使其能够更好地完成任务要求。
然而,自适应控制算法在实际应用中仍然存在一些挑战和限制。
首先,自适应控制算法对参数估计和模型预测的准确性要求较高,需要进行大量的模型建立和参数辨识工作。
无人机自主飞行控制算法的设计与实现随着科技发展的不断推进,无人机技术也日益成熟。
无人机的自主飞行控制算法是实现其智能化、自动化操作的关键。
本文将着重探讨无人机自主飞行控制算法的设计与实现。
一、概述无人机自主飞行控制算法是指通过计算机技术和数学模型,实现无人机在无人控制的情况下,自主飞行、避障、航迹规划等自主控制操作的算法。
在实际操作中,无人机不仅需要在预设的飞行高度、速度、航线上自动飞行,而且还需要根据环境变化实时进行数据分析、识别、预测和应对,从而完成无人机的自主飞行控制。
二、无人机自主飞行控制算法的设计无人机自主飞行控制算法的设计需要从以下多个方面考虑。
1. 系统构架设计:构建稳定、可控、高效、灵活的系统框架,考虑到算法的维护性、扩展性和可重用性。
2. 传感器选择及优化:由于无人机的自主飞行过程需要大量的数据支撑,传感器选取和优化是一个非常关键的问题。
传感器类型包括GPS、惯性测量单元(IMU)、气压计等。
传感器的优化可以考虑到对噪声的滤波处理、精度提升等方面。
3. 航迹规划:继承计算机科学中路径规划算法的思想,无人机的航迹规划主要包括选择最佳路径、规划飞行高度、点、线等。
4. 避障算法:无人机在自主飞行时,很可能会遇到障碍物,因此设计避障算法也至关重要。
避障算法常用的方法是基于LIDAR扫描、视觉识别或者深度学习等。
5. 自适应控制算法:无人机的状况十分复杂,飞行时会受到气候、地形等多种因素的影响,因此设计自适应控制算法是可以确保无人机稳定运行的一项关键因素。
常用的算法有比例积分微分控制(PID)算法、自我调节控制(SRS)算法等。
三、无人机自主飞行控制算法的实现无人机自主飞行控制算法的实现需要依赖于现有的机器学习工具和编程语言,包括TensorFlow、Keras、Python等。
在实践中,需要分别实现不同的算法模块,并且通过数据集等信息来训练模型,从而实现数据预处理、模型训练、模型验证等一系列的流程。
无人旋翼飞行器自适应飞行控制系统设计【摘要】无人旋翼飞行器是目前国际上应用比较广泛的侦查设备,其主要特点就是可以实现人员的远程操控,保证了人员的安全,而且无人旋翼飞行器一般体积较小,重量偏轻,具有较好的机动性。
想要保证飞行器在不同气候、地形等条件下完成既定任务,就必须对飞行器的飞行控制系统做出调整。
本文即是对无人旋翼飞行器自适应飞行控制系统的相关设计方案进行的分析,最后通过实验对分析进行实际研究,证明了本次分析设计的飞行控制系统具有较好的自适应性和鲁棒性,能够充分实现飞行器在空中的各类动作,并且可以有效稳定飞行器空中姿态,提高了控制人员的可操作性。
【关键词】无人飞行器自适应控制设计实验无人飞行器是目前较为先进的无人侦查设备之一,具有较好的机动性,体重较轻,能够高速飞行,适合未来战场上的侦查工作。
目前世界上的飞行器主要以无人旋翼飞行器为主,其根据螺旋桨的个数或螺旋桨轴的个数进行分类,可以实现高难度的空中动作,如翻滚、直停、侧飞、垂直升降等,在继承直升机等机型优点的基础上,加入了一些更加先进的技术。
一、自适应飞行控制律的设计(一)模型逆自适应控制系统最早是被应用在航天航空领域,提出这一理念是因为当飞行设备在外部环境下进行飞行的过程中会遇到各类外界因素的影响。
这些因素都会影响飞行装置的稳定性,对飞行器的飞行高度和速度造成一定的影响。
目前想要获得无人旋翼飞行器的精确公式还有一定困难,通常情况下均是采用经验对相关数据进行估计,或实验中所得出的平均参数,因此这类计算方法存在一定的误差性。
其误差可以用:来进行表示。
其代表飞行器系统的实际动态情况和预估动态情况之间的差异,这种误差可以通过控制器逆误差来进行补偿。
(二)模型逆误差动态特性以三轴无人飞行器为例,其控制回路的设计模型一般上是用二阶稳定模型来进行表示,其指令向量的公式为:。
而飞行器在飞行过程中所收到的角加速度影响向量的公式则为:,用来表示神经网络中计算数据所需要的输出量,以此来对模型的逆差进行补偿。
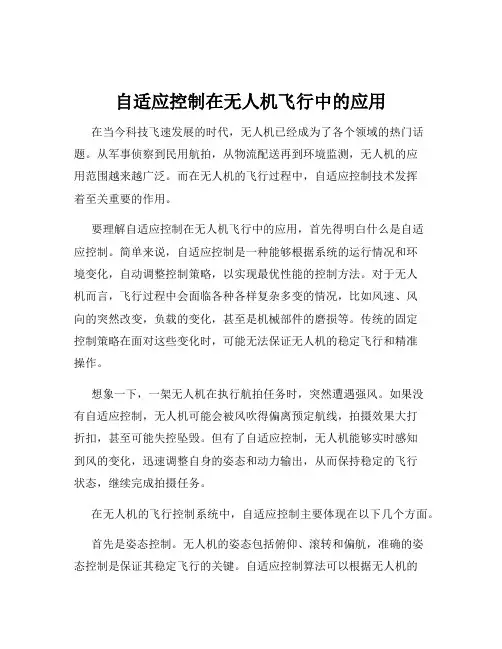
自适应控制在无人机飞行中的应用在当今科技飞速发展的时代,无人机已经成为了各个领域的热门话题。
从军事侦察到民用航拍,从物流配送再到环境监测,无人机的应用范围越来越广泛。
而在无人机的飞行过程中,自适应控制技术发挥着至关重要的作用。
要理解自适应控制在无人机飞行中的应用,首先得明白什么是自适应控制。
简单来说,自适应控制是一种能够根据系统的运行情况和环境变化,自动调整控制策略,以实现最优性能的控制方法。
对于无人机而言,飞行过程中会面临各种各样复杂多变的情况,比如风速、风向的突然改变,负载的变化,甚至是机械部件的磨损等。
传统的固定控制策略在面对这些变化时,可能无法保证无人机的稳定飞行和精准操作。
想象一下,一架无人机在执行航拍任务时,突然遭遇强风。
如果没有自适应控制,无人机可能会被风吹得偏离预定航线,拍摄效果大打折扣,甚至可能失控坠毁。
但有了自适应控制,无人机能够实时感知到风的变化,迅速调整自身的姿态和动力输出,从而保持稳定的飞行状态,继续完成拍摄任务。
在无人机的飞行控制系统中,自适应控制主要体现在以下几个方面。
首先是姿态控制。
无人机的姿态包括俯仰、滚转和偏航,准确的姿态控制是保证其稳定飞行的关键。
自适应控制算法可以根据无人机的动态特性和外部干扰,实时调整控制参数,确保无人机在各种情况下都能保持正确的姿态。
比如,当无人机受到侧风干扰时,自适应控制器会增加相应方向的舵面偏转,以抵消风的影响,使无人机不会发生侧倾。
其次是速度和高度控制。
在不同的飞行任务中,无人机需要保持特定的速度和高度。
自适应控制可以根据空气密度、负载变化等因素,自动调整发动机的推力或电机的转速,从而实现对速度和高度的精确控制。
例如,当无人机携带的货物重量增加时,自适应控制会增加动力输出,以保持预定的飞行速度和高度。
另外,自适应控制还在无人机的路径规划和导航中发挥着重要作用。
在复杂的环境中,无人机需要根据实时获取的地形、障碍物等信息,动态调整飞行路径。
基于自适应控制的飞行器整体飞行姿态控制设计随着时代的发展和技术的进步,人们对于无人机及其控制系统的技术水平和精度要求越来越高。
其中,整体飞行姿态控制是无人机控制系统中最为核心的部分之一,也是最为关键的因素之一。
因此,如何设计基于自适应控制的飞行器整体飞行姿态控制系统成为了当前研究的热点之一。
本文将对这一主题展开深入的探讨。
一、整体飞行姿态控制的概念和意义整体飞行姿态控制是指无人机在飞行过程中,需要对其整体姿态进行调整,以保证无人机能够保持平稳的飞行状态。
这种姿态调整需要对无人机的姿态角进行控制,这些姿态角包括滚转角、俯仰角和偏航角等。
当无人机受到外部干扰或者自身惯性导致的摆动时,整体飞行姿态控制系统需要能够及时检测这些姿态角的改变,并且对其进行调整,保持无人机的飞行稳定。
整体飞行姿态控制的意义在于,保障了无人机的飞行安全和可靠性。
在航空、军事、海上救援等领域,无人机作为一种可控的飞行器设备,其飞行姿态控制的精度和效率直接影响着无人机的工作效果和任务完成率。
因此,一个稳定可靠的整体飞行姿态控制系统,对于无人机的性能、操作手感和整体效能都有着极为重要的意义。
二、自适应控制的原理和优势在整体飞行姿态控制系统的设计中,自适应控制技术是一种广泛应用的技术手段。
自适应控制技术是通过对控制系统所处环境和系统状态进行实时监测和分析,并对其进行适应性调节,以达到最优控制效果的一种控制技术。
自适应控制技术具有一些优势,比如可以实现更加精确和灵活的控制,对于不明确、多变或未知的控制环境下仍能有效地进行控制。
在无人机的整体飞行姿态控制系统中,自适应控制技术可以通过对无人机各项参数和状态的实时监测和分析,根据实时的控制需要进行动态调整,实现更加精准的控制效果。
三、基于自适应控制技术的整体飞行姿态控制系统设计基于自适应控制技术的整体飞行姿态控制系统设计,需要考虑到无人机的各项参数和状态的控制和调整。
具体来说,可以分为以下几个步骤:1、系统建模对无人机和控制系统进行建模,将其简化为各种传递函数和状态空间模型,确定控制系统的输入输出关系。
无人机控制中的自适应控制技术研究随着科技的迅速发展,无人机越来越受到人们的关注和使用。
无人机在日常生活中的使用确实给人们的生活带来了许多方便,同时也广泛应用于各个领域,如军事侦察、航拍、物流、消防救援等。
然而,无人机控制过程中也存在一些技术难点和挑战,其中最为重要的是无人机的自适应控制技术。
自适应控制是指系统能够自动识别其所处的环境以及时变特性,并能够动态地调整控制参数,从而实现良好的控制效果和控制稳定性。
在无人机控制中,自适应控制技术可以有效地提高无人机的控制精度和稳定性,同时也能够提高其适应不同环境下的更强的工作能力。
现在,越来越多的研究者开始关注无人机自适应控制技术的研究,他们提出了许多新的方法来实现无人机的自适应控制。
接下来,我们将从几个方面来进行探讨。
1.智能控制算法传统的控制算法具有较弱的自适应能力,难以适应复杂的环境和不确定性因素。
而智能控制算法则具有更为强大的自适应能力,能够实时学习环境的变化和先前的控制结果,从而动态调整控制参数,提高控制精度和稳定性。
当前常用的智能控制算法包括模糊控制、神经网络控制、遗传算法控制等。
在研究过程中,研究者们尝试将这些算法应用到无人机控制中,取得了不错的效果。
2.模型预测控制模型预测控制是一种基于模型的控制方法,通过计算机模拟系统的状态和控制输入来预测系统未来的状态,并据此计算控制输入。
该控制方法具有较高的自适应性和鲁棒性,能够有效地应对系统产生的抖动并保持控制效果的稳定性。
在无人机控制中,使用模型预测控制方法可以提高控制精度和控制响应速度,并能够适应不同的环境和航空器性能变化。
3.动态规划算法动态规划算法是一种基于最优控制理论的控制方法,在估算系统状态和环境状态的基础上,动态调整控制参数,以达到最优化控制效果。
该控制方法具有较高的控制效果和鲁棒性,能够有效地适应不同的环境和复杂的航空器性能。
在无人机控制中,使用动态规划算法可以提高控制精度和鲁棒性,同时能够适应速度和姿态的变化。
无人机编队飞行控制方法无人机编队飞行控制方法引言在无人机技术的快速发展中,无人机编队飞行控制成为一项重要的研究领域。
通过编队飞行,多架无人机可以实现协同作战、搜索救援、航拍等各种任务,具有广阔的应用前景。
本文将详细介绍几种常见的无人机编队飞行控制方法,包括以下几个方面:•中心控制方法•分布式控制方法•基于视觉的控制方法•基于遗传算法的控制方法1. 中心控制方法中心控制方法是指通过一个中心节点对整个无人机编队进行控制和协调。
具体实现方式可以是将所有无人机连接到同一个中心控制器,或者通过无线通信的方式实现中心控制。
这种方法适用于任务比较简单且编队规模较小的情况。
•优点:–控制简单,易于实现;–可以实现高度协同的编队飞行。
•缺点:–单点故障问题,如果中心节点失效,整个编队将无法正常飞行;–编队规模受限,不适用于大规模编队运行。
2. 分布式控制方法分布式控制方法是指每个无人机都具有一定的自主决策能力,通过协同合作实现编队飞行。
每个无人机通过相互通信交换信息,并根据规则进行调整和协调。
这种方法适用于任务复杂、编队规模较大的情况。
•优点:–没有单点故障问题,每个无人机可独立运行;–适用于大规模编队,具有良好的可扩展性。
•缺点:–控制复杂,需要对各个无人机之间的通信和决策进行合理设计;–需要较高的计算能力和通信能力。
3. 基于视觉的控制方法基于视觉的控制方法是指通过无人机的摄像头或其他传感器获取环境信息,并根据这些信息进行编队飞行控制。
通过对各个无人机位置和姿态的识别和跟踪,实现编队的控制和协调。
•优点:–不依赖于外部设备,无需额外的传感器或通信设备;–可以实现对多种环境的自适应控制。
•缺点:–受限于传感器的性能和环境条件,可能存在识别误差;–对计算能力和算法要求较高。
4. 基于遗传算法的控制方法基于遗传算法的控制方法是指通过模拟生物进化过程,对编队飞行控制策略进行优化。
通过遗传算法的搜索和优化能力,找到最优的控制策略,实现编队的高效飞行。
无人机自主飞行控制算法的设计与优化策略随着无人机技术的不断发展,无人机的应用范围也越来越广泛。
然而,无人机飞行中的自主控制是实现有效、安全飞行的关键。
本文将就无人机自主飞行控制算法的设计与优化策略进行探讨。
无人机的自主飞行控制算法需要实现的功能包括航迹规划、路线规划、避障、姿态控制等。
下面将分别对这些功能进行讨论。
首先是航迹规划。
航迹规划是确定无人机的飞行路径的过程。
在设计航迹规划算法时,需要考虑无人机飞行环境、任务要求等因素。
常用的航迹规划算法包括直线航迹规划、贝塞尔曲线航迹规划和Dubins 路径规划等。
这些算法的选择取决于具体应用场景和任务要求。
其次是路线规划。
路线规划是确定无人机沿航迹飞行的具体路径的过程。
在设计路线规划算法时,需要考虑无人机的运动能力、速度约束、风力等因素。
常用的路线规划算法包括蚁群算法、遗传算法和A*算法等。
这些算法可以根据具体情况来选择合适的方法,以实现最优的路径规划。
第三是避障功能。
避障是指无人机在飞行过程中避免与障碍物碰撞的能力。
无人机避障算法的设计需要考虑障碍物检测与感知、路径规划和避障策略等因素。
常用的避障算法包括概率地图法、虚拟势场法和模型预测控制法等。
这些算法可以帮助无人机识别并避开障碍物,以确保飞行的安全性。
最后是姿态控制功能。
姿态控制是指控制无人机在飞行中保持所需的姿态状态的能力。
无人机姿态控制算法的设计需要考虑无人机的动力学模型、传感器信息和控制输入等因素。
常用的姿态控制算法包括PID控制算法、模型预测控制算法和自适应控制算法等。
这些算法可以实现无人机姿态的稳定控制,以满足飞行任务的要求。
除了上述功能,无人机自主飞行控制算法的设计还需要考虑能耗优化、实时性要求和鲁棒性等因素。
在设计算法时,可以采用优化算法如遗传算法和粒子群算法来优化飞行控制算法的参数,以降低能耗和提高性能。
综上所述,无人机自主飞行控制算法的设计与优化策略对于实现有效、安全飞行至关重要。
无人机编队飞行控制系统设计与优化研究随着技术的不断进步和应用场景的不断扩展,无人机越来越成为人们关注和研究的热门话题。
无人机编队飞行控制系统作为无人机的重要组成部分,对于无人机编队飞行的稳定性、安全性、效率性等方面有着非常重要的作用。
本文将从无人机编队飞行控制系统的设计与优化方面展开分析和讨论。
一、无人机编队飞行控制系统的基本组成无人机编队飞行控制系统主要由传感器、数据收集与处理模块、控制器、执行机构等几个部分组成。
其中,传感器是无人机编队飞行的“眼睛”和“耳朵”,用于感知无人机编队的状态信息,并将这些信息传输到数据收集与处理模块。
数据收集与处理模块是无人机编队飞行控制系统的核心部分,负责对传感器采集的信息进行处理、分析和判断,确定无人机编队的状态和需要采取的控制方式,并输出相应的控制信号给到控制器。
控制器则是根据数据收集与处理模块提供的控制信号,确定无人机编队飞行的控制策略和方案,并输出控制指令给到执行机构,最终驱动无人机实现编队飞行。
二、无人机编队飞行控制系统设计中的关键技术无人机编队飞行控制系统的设计与实现需要涉及多种技术,其中一些关键技术包括:1. 无人机编队飞行轨迹规划技术:通过分析和预测编队内每架无人机的运动模式及编队整体的运动规律,制定出相应的编队飞行轨迹规划方案,实现无人机编队飞行的高效、安全、准确、稳定等特点。
2. 无人机编队自主避障技术:在无人机编队飞行的过程中,需要解决无人机之间的避障问题。
基于距离传感器、视觉传感器、雷达传感器等多种传感器技术,实现无人机编队在遇到障碍物时的自主避让和避障动作。
3. 无人机编队通讯与控制技术:通过建立一套稳定可靠的通讯体系,实现无人机编队之间的通讯和控制,保证整个编队飞行过程的有效性和安全性。
三、无人机编队飞行控制系统优化策略与方法在实际应用中,无人机编队飞行控制系统需要不断进行优化和改进,基于现有技术和应用场景,一些优化策略和方法包括:1. 引入机器学习技术:在数据收集与处理模块中引入机器学习技术,利用大数据分析和机器学习算法,对无人机编队飞行过程中的状态信息进行预测和分析,不断提高无人机编队飞行控制系统的智能化和自动化。
无人机自主控制系统设计及优化无人机是一种不带人员驾驶,通过自主控制系统完成各项任务的飞行器。
无人机的应用领域广泛,涵盖了军事、侦查、航拍、气象探测等多个方面。
其中,自主控制是实现无人机任务完成的核心技术之一,也是无人机性能提升和应用拓展的关键所在。
无人机自主控制系统的设计和优化是一个复杂的工程问题。
该问题主要涉及到飞行器的成像、任务规划、降落等多个方面。
本文将从以下四个方面进行探讨:无人机自主控制系统的构成、控制系统的优化、控制算法的设计和仿真实验的验证。
一、无人机自主控制系统的构成无人机自主控制系统主要包括感知系统、控制系统和执行系统三个模块。
感知系统通过搭载传感器实时采集周围环境数据,与控制系统相互作用,为飞行器提供实时的环境状态信息。
控制系统通过对环境信息的感知和算法处理,制定任务执行规划并下达命令。
执行系统负责将命令和任务执行指令转换成动作并完成任务。
下面的图示是无人机自主控制系统的构成示意图。
二、控制系统的优化无人机自主控制系统的优化需要从系统的可靠性、鲁棒性、性能等多个方面入手。
其中,系统的可靠性表现为系统的稳定性和安全性,包括任务执行的成功率、飞行器的安全等级等;系统的鲁棒性表现为在面对各种干扰和噪声时,依然能够完成任务;系统的性能表现为系统的运算速度和精度,需要兼顾有效性和实用性。
为了提高系统的可靠性和鲁棒性,在控制系统的设计过程中需要注重优化控制算法,建立高效的控制系统模型。
此外,还需要对系统进行多层次的防错设计和容错处理,减少单点故障的出现概率。
在控制系统的实时控制过程中,还需要设置多个保护性措施,例如设置安全边界、过载保护等。
三、控制算法的设计控制算法是无人机自主控制系统的核心,直接影响着无人机性能和任务执行效率。
针对不同的控制任务和飞行环境,需要设计多种不同类型的控制算法。
常见的控制算法包括:模型预测控制算法、滑模控制算法、自适应控制算法等。
其中,模型预测控制算法是一种基于预测模型的优化控制方法,在控制系统的性能优化和鲁棒性等方面表现出较好的效果。
无人机编队飞行的自适应控制设计王建宏;许莺;熊朝华【摘要】Under the UAV formation flight mode, there would be difficulty in consistency control of keeping and coordinating formation due to the restricted formation flight environment. This paper applies the adaptive control strategy to design the formation flying and generate the speed or heading angle command signal of the controller based on the formation distance and long wingman position and attitude information. It studies two cases: forma-tion control law design with the aerodynamic coupling interference parameters unknown; formation control law design with confounding factors unknown. From the theoretical analysis, it finds out that the formation flying dis-tance error eventually converges to 0 and formation movement stability or formation flying can be maintained by using the basic Lyapunov function structure. The simulation example is then used to prove the efficiency of this parallel distribution algorithm.%无人机在以机群编队飞行的模式下,受编队飞行环境的影响,使得无人机在保持编队队形和协同编队一致性控制问题上存在技术难度。
面向无人机的自适应控制技术随着无人机技术的广泛应用,对无人机自适应控制技术的需求也越来越多。
自适应控制技术能够自动根据无人机的环境和状态进行调整和适应,以提高无人机的稳定性和控制性能。
本文将对面向无人机的自适应控制技术进行详细探讨。
一、无人机的控制系统无人机的控制系统包括传感器、控制器和执行机构三个部分。
传感器能够获取无人机的环境和状态信息,控制器则根据这些信息进行决策和控制,最终输出控制信号驱动执行机构。
无人机控制系统的性能直接决定了无人机的稳定性和控制精度。
二、自适应控制技术的基本概念自适应控制技术的基本思想是根据控制系统性能自动调整控制器参数,以适应控制系统的变化和环境条件。
自适应控制技术可以有效地提高控制系统的稳定性和鲁棒性,并且能够应对无人机控制系统中存在的非线性、时变等复杂性问题。
三、面向无人机的自适应控制技术1.自适应PID控制技术PID控制器是最基本的控制器之一,在无人机控制系统中应用广泛。
但是,现实中无人机的环境和状态变化很大,传统PID控制器无法适应这些变化,因此需要使用自适应PID控制技术。
自适应PID控制器能够根据实时控制效果自动调整PID参数,以达到更好的控制效果。
2.模型预测控制技术无人机控制系统中存在非线性、时变、不确定性等复杂性问题,使得传统控制技术的效果不佳。
模型预测控制技术能够更好地应对这些问题。
该技术利用无人机的动力学模型进行预测,得到未来若干个时刻的控制输入,并实时调整控制器输出。
这种方式能够更为准确地控制无人机,提高其性能和稳定性。
3.基于深度强化学习的控制技术深度强化学习是近年来兴起的一种新型机器学习技术,与无人机控制技术结合能够带来良好的效果。
基于深度强化学习的控制技术可以学习无人机控制器的最佳策略,不断优化控制器输出,从而提高无人机的稳定性和控制精度。
四、总结和展望无人机自适应控制技术是一种重要的控制技术,能够提高控制系统的稳定性和控制能力,使无人机在复杂的环境和状态下仍能正常飞行和执行任务。
无人机控制中的自适应控制算法研究近年来,随着无人机技术的迅速发展,无人机在军事、民用等领域的应用越来越广泛。
无人机的控制技术是其核心技术之一,其中自适应控制算法是无人机控制中的重要算法之一。
自适应控制算法是指利用系统自身的特性对其进行控制的一种方法,该方法能够在控制对象出现变化或者环境变化时自动调整控制参数,从而实现对控制对象的精确控制。
在无人机控制中,自适应控制算法能够有效提高无人机的控制精度和鲁棒性,使其更加适应复杂的飞行环境。
在无人机控制中,自适应控制算法的主要应用包括自适应PID 控制、自适应神经网络控制、模型参考自适应控制等。
其中,自适应PID控制是一种基于PID控制器的自适应控制方法,其通过不断修正PID控制器的参数,从而实现对无人机的控制。
自适应神经网络控制是一种基于神经网络的自适应控制方法,其通过学习控制对象的动态特性,从而实现对无人机的控制。
模型参考自适应控制是一种基于模型引导的自适应控制方法,其通过建立系统数学模型,从而实现对无人机的控制。
无人机控制中的自适应控制算法具有以下特点:1.适应性强。
自适应控制算法能够根据控制对象的变化自动调整控制参数,有效提高控制精度和鲁棒性。
2.稳定性好。
自适应控制算法能够对控制对象的非线性和时变性进行补偿,从而实现对无人机的稳定控制。
3.可靠性高。
自适应控制算法能够根据环境的变化自动调整控制参数,提高了无人机在复杂环境下的控制可靠性。
在实际应用中,我们还需要考虑如何将自适应控制算法与无人机控制系统进行集成,以实现对无人机系统的全面控制。
同时,我们还需要优化自适应控制算法的性能,提高其适用性和鲁棒性。
总之,无人机控制中的自适应控制算法是无人机控制技术中的重要组成部分,它能够有效提高无人机的控制精度和鲁棒性,使其更加适应复杂的飞行环境。
我们需要不断研究和优化自适应控制算法,以提高无人机控制系统的性能和可靠性。