第五讲机器人运动学.
- 格式:ppt
- 大小:1.31 MB
- 文档页数:68
机器人运动学与动力学分析机器人已经成为现代技术中的重要组成部分,它们能够执行各种任务,从生产制造到医疗护理。
要了解机器人的运动和控制,我们需要分析机器人的运动学和动力学。
一、机器人运动学分析机器人运动学研究机器人在空间中的位置和姿态随时间的变化规律。
通过机器人的构造,可以确定机器人的运动学特征。
在运动学分析中,我们主要关注以下几个方面:1. 机器人的自由度:机器人的自由度是指机器人在物理空间中能够独立移动的自由方向数量。
例如,一个平面上的二自由度机器人可以进行平移和旋转运动。
2. 机器人的位姿:机器人的位姿包括位置和姿态。
位置表示机器人在空间中的位置坐标,姿态表示机器人在空间中的朝向。
3. 运动学链模型:运动学链模型用于描述机器人的运动学结构。
它由连续的刚性骨链和可变的关节连接组成。
通过分析这些链条的长度和角度变化,可以确定机器人的位姿。
4. 正逆运动学问题:正运动学问题是指根据机器人的关节角度计算出机器人的位姿。
逆运动学问题是指根据机器人的位姿计算出机器人的关节角度。
机器人的运动学分析为我们提供了了解机器人的位置和姿态变化规律的基础。
二、机器人动力学分析机器人动力学研究机器人在运动过程中所受到的力和力矩的变化规律。
了解机器人动力学对于控制机器人的运动和保证机器人的稳定性非常重要。
在动力学分析中,我们主要关注以下几个方面:1. 运动学约束:机器人的运动受到多个约束条件限制,如关节限制、位置限制等。
这些约束条件对机器人的运动学和动力学分析都会产生影响。
2. 动力学链模型:动力学链模型用于描述机器人的动力学结构。
它包括机器人的质量、惯性矩阵和外部力矩。
通过分析链条间的力和力矩传递,可以推导出机器人的运动学和动力学方程。
3. 运动学和动力学方程:机器人的运动学和动力学方程描述了机器人在外部力矩作用下的运动规律。
运动学方程描述了机器人的位移和速度关系,动力学方程描述了机器人的加速度和力矩关系。
机器人的动力学分析为我们提供了了解机器人在运动过程中受到的力和力矩变化规律的基础。
机器人运动学机器人运动学机器人运动学是研究机器人运动规律和运动控制的学科。
它是机器人技术的重要组成部分,对于机器人的设计、控制和应用具有重要意义。
机器人运动学主要研究机器人在空间中的运动规律,包括位置、速度和加速度等。
通过研究机器人的运动学特性,可以实现对机器人的精确控制和规划。
机器人运动学主要包括正运动学和逆运动学两个方面。
正运动学是指根据机器人关节的位置和长度,求解机器人末端执行器的位置。
它通过解析几何、向量运算和矩阵变换等数学方法,将机器人关节的位置参数转化为末端执行器的位置参数,从而实现对机器人的位置控制。
逆运动学是指根据机器人末端执行器的位置,求解机器人关节的位置和长度。
逆运动学是机器人运动学的核心内容,也是机器人控制的关键问题之一。
通过逆运动学,可以实现对机器人末端执行器的精确控制,从而实现机器人在空间中的精确定位和定向。
机器人运动学的研究还包括机器人的姿态和轨迹规划。
姿态是指机器人在空间中的朝向和姿势,轨迹是指机器人在运动过程中的路径和速度。
通过研究机器人的姿态和轨迹规划,可以实现机器人在复杂环境中的灵活运动和避障控制。
机器人运动学的应用非常广泛。
在工业领域,机器人运动学被应用于自动化生产线的控制和优化,实现了生产效率的提高和生产成本的降低。
在医疗领域,机器人运动学被应用于手术机器人的控制和操作,实现了微创手术和精确手术的目标。
在军事领域,机器人运动学被应用于无人飞机和无人车辆的控制和导航,实现了作战效能的提高和战场风险的降低。
机器人运动学的发展离不开先进的传感器和控制技术的支持。
传感器可以实时感知机器人的位置和环境信息,控制技术可以根据机器人的位置和运动规律,实现对机器人的精确控制和运动规划。
总结起来,机器人运动学是研究机器人运动规律和运动控制的学科,主要包括正运动学、逆运动学、姿态和轨迹规划等内容。
机器人运动学的研究和应用对于机器人技术的发展和应用具有重要意义,将为我们创造更多的便利和机会。
第2章 机器人位置运动学2.1 引言本章将研究机器人正逆运动学。
当已知所有的关节变量时,可用正运动学来确定机器人末端手的位姿。
如果要使机器人末端手放在特定的点上并且具有特定的姿态,可用逆运动学来计算出每一关节变量的值。
首先利用矩阵建立物体、位置、姿态以及运动的表示方法,然后研究直角坐标型、圆柱坐标型以及球坐标型等不同构型机器人的正逆运动学,最后利用Denavit-Hartenberg(D-H)表示法来推导机器人所有可能构型的正逆运动学方程。
实际上,机器手型的机器人没有末端执行器,多数情况下,机器人上附有一个抓持器。
根据实际应用,用户可为机器人附加不同的末端执行器。
显然,末端执行器的大小和长度决定了机器人的末端位置,即如果末端执行器的长短不同,那么机器人的末端位置也不同。
在这一章中,假设机器人的末端是一个平板面,如有必要可在其上附加末端执行器,以后便称该平板面为机器人的“手”或“端面”。
如有必要,还可以将末端执行器的长度加到机器人的末端来确定末端执行器的位姿。
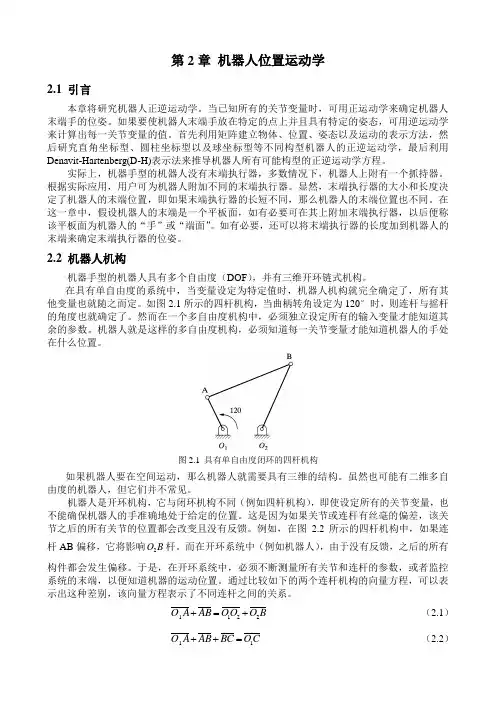
2.2 机器人机构机器手型的机器人具有多个自由度(DOF ),并有三维开环链式机构。
在具有单自由度的系统中,当变量设定为特定值时,机器人机构就完全确定了,所有其他变量也就随之而定。
如图2.1所示的四杆机构,当曲柄转角设定为120°时,则连杆与摇杆的角度也就确定了。
然而在一个多自由度机构中,必须独立设定所有的输入变量才能知道其余的参数。
机器人就是这样的多自由度机构,必须知道每一关节变量才能知道机器人的手处在什么位置。
图2.1 具有单自由度闭环的四杆机构如果机器人要在空间运动,那么机器人就需要具有三维的结构。
虽然也可能有二维多自由度的机器人,但它们并不常见。
机器人是开环机构,它与闭环机构不同(例如四杆机构),即使设定所有的关节变量,也不能确保机器人的手准确地处于给定的位置。
这是因为如果关节或连杆有丝毫的偏差,该关节之后的所有关节的位置都会改变且没有反馈。
2章 ロボットの運動学
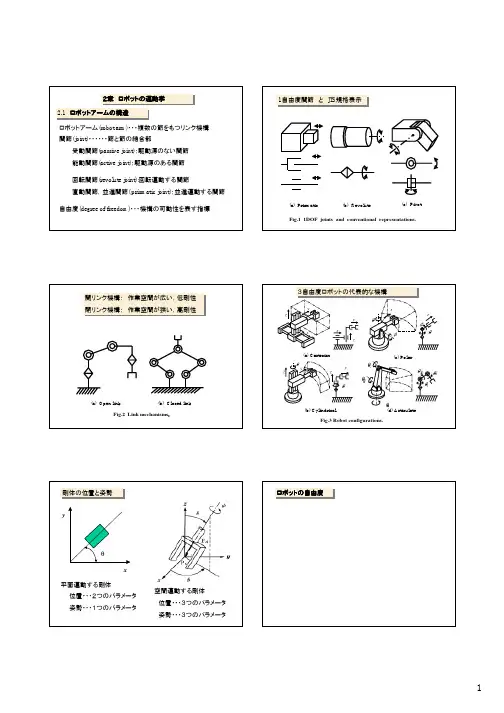
2章 ロボットの運動学2.1 ロボットアームの構造ロボットアームの構造
2.1 ロボットアームの構造ロボットアームの構造ロボットアーム(robot arm)・・・複数の節をもつリンク機構1自由度関節 と JIS 規格表示
1自由度関節 と JIS 規格表示開リンク機構: 作業空間が広い,低剛性閉リンク機構: 作業空間が狭い,高剛性
開リンク機構: 作業空間が広い,低剛性閉リンク機構: 作業空間が狭い,高剛性r
y
3自由度ロボットの代表的な機構
3自由度ロボットの代表的な機構剛体の位置と姿勢剛体の位置と姿勢ロボットの自由度
ロボットの自由度
空間リンク機構(ロボット)の可動度(mobility)
空間リンク機構(ロボット)の可動度(mobility)平面運動機構の自由度と可動度の例
平面運動機構の自由度と可動度の例パラレルリンク機構の自由度と可動度
パラレルリンク機構の自由度と可動度ロボットの座標系(coordinate system)
ロボットの座標系(coordinate system)座標系の平行移動
座標系の平行移動座標系の回転移動
座標系の回転移動
座標系の平行移動と回転移動座標系の平行移動と回転移動
z A
姿勢表現・・・zyzオイラー角
姿勢表現・・・zyzオイラー角
姿勢表現・・・ロール・ピッチ・ヨウ角(zyxオイラー角)姿勢表現・・・ロール・ピッチ・ヨウ角(zyxオイラー角)
z。
机器人运动学分析的工作原理机器人运动学分析是机器人控制中的重要部分,它在机器人运动控制中扮演着非常重要的角色。
目前,机器人运动学分析已成为机器人控制领域的研究热点之一。
本文将从以下几个方面来阐述机器人运动学分析的工作原理。
一、机器人运动学简介机器人运动学是描述机器人的运动过程的学科,是机器人控制中最基本的分支之一。
机器人运动学研究机器人的位姿、速度、加速度、力与力矩,以及机器人操作的方式。
机器人运动学的研究内容包括位置、速度、加速度等基本知识,以及机器人的工作空间、工作范围和重心分析等。
机器人运动学中有两种基本的方法:1、正运动学:正运动学是指机器人末端的位置和姿态与机器人各个关节的角度之间的关系。
在机器人的控制过程中,各关节的角度控制朝着使末端执行具体的任务的方向进行;而由于关节角度与末端位置和姿态之间的变换式已知,在控制中就可以根据控制任务要求确定末端所需要达到的位置和姿态。
正运动学是掌握各关节角度和末端位置和姿态之间的变换关系,从而计算机器人末端的位置和姿态,确定机器人需要达到的位置和姿态,进一步完成机器人的控制。
2、逆运动学:逆运动学是指计算机器人各个关节的角度,从而让机器人的末端达到需要的位置和姿态。
在计算过程中,只要给出机器人末端的位置和姿态,就可以计算出机器人各个关节的角度。
以笛卡尔空间指定为例,逆运动学可以计算出机器人各关节的角度,从而控制机器人实现指定的位置和姿态。
二、机器人运动学分析的目的和意义机器人运动学分析的目的是研究机器人运动规律,从而实现机器人的运动控制。
模拟机器人的运动轨迹和加速度,精确地了解机器人的控制过程,以达到最优化、最快速、最准确、最稳定的效果。
机器人运动学分析的意义在于解决了机器人的控制问题,机器人可以根据指令控制角度、位置和速度的变化,精确地执行各种任务。
同时,运动学分析还可实现机器人的路径规划、动力学分析等。
三、机器人运动学分析的实现流程机器人运动学分析,一般分为以下几个步骤:1、建立机器人的坐标系在进行机器人运动学分析之前,需要建立机器人的坐标系和轴方向,以方便分析。

机器人运动学介绍机器人运动学是机器人学中的一个重要分支,研究机器人的运动学原理和方法。
它关注的是机器人在二维或三维空间中的运动规律,包括位置、速度和加速度等。
机器人运动学是机器人控制的基础,它对于实现精确的运动控制和路径规划非常关键。
掌握机器人运动学理论和方法,能够帮助我们设计出更高效、更安全的机器人系统。
在本文档中,我们将介绍机器人运动学的基本概念和常用方法,包括前向运动学、逆向运动学和雅可比矩阵等。
前向运动学前向运动学是机器人运动学中的一种基本方法,用于计算机器人末端执行器的位置和姿态。
它通过将每个关节的运动传递下去,从而得到机器人的整体姿态。
在前向运动学中,我们需要了解机器人的连杆长度、关节角度和坐标系的定义。
通过这些参数,我们可以构建一个运动学模型,用于计算机器人的末端执行器位置和姿态。
通常,采用矩阵变换的方法来表示前向运动学。
我们可以通过一系列的坐标转换和旋转矩阵,将关节角度转化为末端执行器的位置和姿态。
逆向运动学逆向运动学是机器人运动学中的另一种重要方法,与前向运动学相反,它通过已知机器人末端执行器的位置和姿态,计算各个关节的角度。
逆向运动学常用于机器人路径规划和精确定位。
在机器人控制中,我们通常通过末端执行器的位置和姿态,来确定关节角度,从而实现期望的运动。
逆向运动学的计算过程相对复杂,通常采用优化算法或迭代求解的方法。
我们需要根据机器人的运动学模型和关节限制条件,对目标函数进行建模,并求解使目标函数最小化的关节角度。
雅可比矩阵雅可比矩阵是机器人运动学中的一个重要工具,用于描述机器人的运动学性能和控制能力。
它描述了机器人末端执行器的速度和姿态变化,对于路径规划和动力学分析非常有用。
雅可比矩阵的计算采用了线性近似的方法,通过对机器人运动学模型的导数进行计算。
它可以描述机器人关节角度和末端执行器的关系,从而可以帮助我们分析机器人的运动性能和控制精度。
雅可比矩阵在机器人运动学中有广泛的应用,例如用于机器人轨迹规划、碰撞检测和机器人力学优化等方面。
简述机器人的运动学嘿,来聊聊机器人的那些事儿吧!你知道吗?机器人其实就像我们人类一样,得学会怎么动,怎么走,怎么优雅地转个圈。
这可不是件容易的事儿,得靠一套叫做“运动学”的神奇规则来搞定。
首先,咱们得明白,机器人运动学就像是教机器人跳华尔兹,得有节奏、有章法。
机器人要想动起来,得先搞清楚自己的“骨架”——也就是它的各个关节和连杆。
这就好比我们人类的胳膊和腿,得知道怎么协调才能走路不摔跤。
接下来,咱们得给机器人装上“大脑”,也就是运动学算法。
这算法就像是给机器人编的舞步,告诉它每个关节该怎么动,才能完成从A点到B点的华丽转身。
这可不是随便乱动,得精确计算,就像我们小时候学数学一样,一步一个脚印,不能跳步。
现在,咱们来点实际的。
想象一下,机器人要拿个东西,它得先知道那东西在哪儿,这就得用到“正运动学”。
简单来说,就是告诉机器人,它的手要伸到哪个位置,它的“大脑”就会算出每个关节应该转多少度。
这就像我们小时候玩的“寻宝游戏”,得先知道宝藏藏在哪儿,然后一步步地找过去。
反过来,如果机器人已经动起来了,我们想知道它的手在哪儿,这就得用到“逆运动学”了。
这就好比我们闭着眼睛,别人告诉你他站在哪儿,你得猜出他离你有多远,方向是哪儿。
机器人也是这样,通过计算,它能知道自己的手在空间中的确切位置。
说到这儿,你是不是觉得机器人运动学挺像我们小时候玩的积木游戏?把一块块积木搭起来,最后搭出一个酷炫的机器人。
运动学就是给这些积木赋予生命,让它们动起来,按照我们的意愿跳舞。
当然,机器人运动学的世界里,还有好多“高大上”的东西,比如“冗余度”和“奇异点”。
冗余度就像是我们多长了一只手,可以有更多种方式完成同一个动作。
而奇异点呢,就像是我们跳舞时突然不知道下一步该怎么迈,机器人也会遇到这样的问题,这时候就需要特别的处理方法。
最后,别忘了,机器人运动学不仅仅是为了让机器人动起来,它还关系到机器人的效率和安全性。
就像我们开车,得知道怎么转弯才能既快又安全。
第2章 机器人位置运动学2.1 引言本章将研究机器人正逆运动学。
当已知所有的关节变量时,可用正运动学来确定机器人末端手的位姿。
如果要使机器人末端手放在特定的点上并且具有特定的姿态,可用逆运动学来计算出每一关节变量的值。
首先利用矩阵建立物体、位置、姿态以及运动的表示方法,然后研究直角坐标型、圆柱坐标型以及球坐标型等不同构型机器人的正逆运动学,最后利用Denavit-Hartenberg(D-H)表示法来推导机器人所有可能构型的正逆运动学方程。
实际上,机器手型的机器人没有末端执行器,多数情况下,机器人上附有一个抓持器。
根据实际应用,用户可为机器人附加不同的末端执行器。
显然,末端执行器的大小和长度决定了机器人的末端位置,即如果末端执行器的长短不同,那么机器人的末端位置也不同。
在这一章中,假设机器人的末端是一个平板面,如有必要可在其上附加末端执行器,以后便称该平板面为机器人的“手”或“端面”。
如有必要,还可以将末端执行器的长度加到机器人的末端来确定末端执行器的位姿。
2.2 机器人机构机器手型的机器人具有多个自由度(DOF ),并有三维开环链式机构。
在具有单自由度的系统中,当变量设定为特定值时,机器人机构就完全确定了,所有其他变量也就随之而定。
如图2.1所示的四杆机构,当曲柄转角设定为120°时,则连杆与摇杆的角度也就确定了。
然而在一个多自由度机构中,必须独立设定所有的输入变量才能知道其余的参数。
机器人就是这样的多自由度机构,必须知道每一关节变量才能知道机器人的手处在什么位置。
图2.1 具有单自由度闭环的四杆机构如果机器人要在空间运动,那么机器人就需要具有三维的结构。
虽然也可能有二维多自由度的机器人,但它们并不常见。
机器人是开环机构,它与闭环机构不同(例如四杆机构),即使设定所有的关节变量,也不能确保机器人的手准确地处于给定的位置。
这是因为如果关节或连杆有丝毫的偏差,该关节之后的所有关节的位置都会改变且没有反馈。