六自由度工业机器人运动学和动力学分析答辩PPT
- 格式:pptx
- 大小:5.31 MB
- 文档页数:23
六自由度机器人运动学分析殷固密,王建生(五邑大学智能制造学部,广东江门529020)0引言随着中国制造2025和工业4.0的提出与发展,机器人在“机器换人”和提高社会生产力中扮演着不可或缺的重要位置。
为了使机器人平稳准确地完成指定任务,机器人的运动学分析是必不可少的。
其中,机器人运动学分析的基础就是D-H 参数建立和正逆运动学求解及验证。
通过基础分析,可以帮我们了解机器人的工作方法,揭示机构的合理运动方案和控制算法。
结合使用仿真软件的计算可视化,可以更直观地体现机器人的设计效果,及时发现缺点和不足并改正。
以库卡机器人KR16-2,一种末端三关节轴线相交于一点的六自由度工业机器人为研究对象,通过Craig 和Spong 两种不同的D-H 法则(全称Denavit-Hartenber)对该机器人机型进行运动学建模,推导出机器人正逆运动学模型,并利用MATLA 及Robotics Toolbox 进行运动学分析仿真验证。
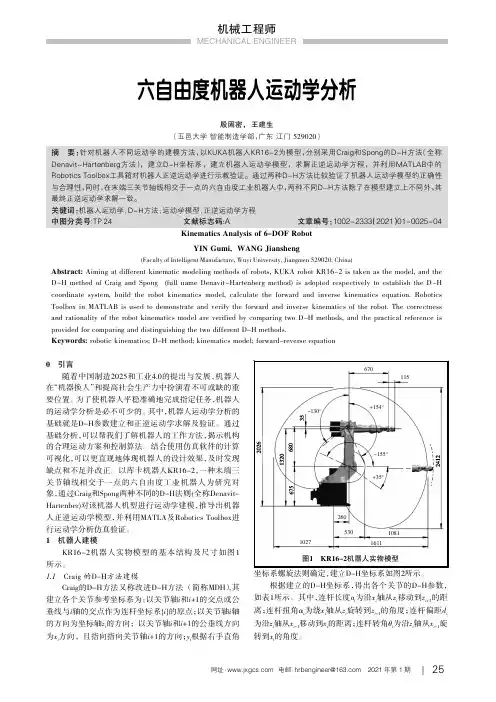
1机器人建模KR16-2机器人实物模型的基本结构及尺寸如图1所示。
1.1Craig 的D-H 方法建模Craig 的D-H 方法又称改进D-H 方法(简称MDH ),其建立各个关节参考坐标系为:以关节轴i 和i+1的交点或公垂线与i 轴的交点作为连杆坐标系{i }的原点;以关节轴i 轴的方向为坐标轴z i 的方向;以关节轴i 和i+1的公垂线方向为x i 方向,且指向指向关节轴i+1的方向;y i 根据右手直角坐标系螺旋法则确定,建立D-H 坐标系如图2所示。
根据建立的D-H 坐标系,得出各个关节的D-H 参数,如表1所示。
其中,连杆长度a i 为沿x i 轴从z i 移动到z i+1的距离;连杆扭角αi 为绕x i 轴从z i 旋转到z i +1的角度;连杆偏距d i 为沿z i 轴从x i -1移动到x i 的距离;连杆转角θi 为沿z i 轴从x i -1旋转到x i 的角度。
摘要:针对机器人不同运动学的建模方法,以KUKA机器人KR16-2为模型,分别采用Craig和Spong的D-H方法(全称Denavit-Hartenberg方法),建立D-H坐标系,建立机器人运动学模型,求解正逆运动学方程,并利用MATLAB中的Robotics Toolbox工具箱对机器人正逆运动学进行示教验证。
机器人技术导论以6自由度工业机器人为例,分析讨论机器人的控制:工业机器人能够提高生产过程的自动化程度和生产设备的适应能力,因而提高产品质量和产品在市场上的竞争能力。
全世界已有约80万台工业机器人正在汽车工业、机电工业和其他工业部门运行,为人类的物质生产建功立业。
其中,以焊接机器人和装配机器人为两个最主要的应用领域。
与工业机器人相比,其他机器人的数量尚十分有限,但其重要性不容忽视,发展前景也十分看好。
市场上供应的工业机器人,关节数多为3~7个。
最典型的工业机器人具有六个关节,存在六个自由度,带有夹手(通常称为手或末端执行装置)。
辛辛那提-米拉克龙T3、尤尼梅逊的PUMA650和斯坦福机械手都是具有六个关节的工业机器人,并分别由液压、气压或电气传动装置驱动。
位置控制:工业机器人位置控制的目的,就是要使机器人各关节实现预先所规划的运动,最终保证工业机器人终端(手爪)沿预定的轨迹运行。
这类运动控制的特点是连续控制工业机器人手爪(或工具)的位姿轨迹。
一般要求速度可控、轨迹光滑且运动平稳。
轨迹控制的技术指标是轨迹精度和平稳性。
工业机器人的控制是个多输入一多输出控制系统。
我们把每个关节作为一个独立的系统。
因而,对于一个具有m个关节的工业机器人来说,我们可以把它分解成m个独立的单输入一单输出控制系统。
这种独立关节控制方法是近似的,因为它忽略了工业机器人的运动结构特点,即各个关节之间相互耦合和随形位变化的事实。
如果对于更高性能要求的机器人控制,则必须考虑更有效的动态模型、更高级的控制方法和更完善的计算机体系结构。
仅控制机器人离散点上手爪或工具的位姿,尽快而无超调地实现相邻点的运动,对运动轨迹不作控制。
主要技术指标:点位精度、完成运动的时间。
2机器人控制系统结构及工作原理基于PC的Windows操作系统,因其友好的人机界面和广泛的用户基础,而成为基于PC控制器的首选。
采用PC作为机器人控制器的主机系统的优点是:①成本低;②具有开放性;③完备的软件开发环境和丰富的软件资源;④良好的通讯功能。

六轴联动机械臂运动学求解分析第一讲作者朱森光Email zsgsoft@1引言笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。
笔者工作主要从事软件开发跟机器人毫无关系,利用业余时间研究整理机器人技术相关的文章,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术资料。
本系列文章的所有文字、图片及相关资料均为原创,内容正确性经过笔者亲自编程仿真验证可以信赖。
2机器建模2.1坐标系既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。
首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右为X轴,屏幕水平向上为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。
图2-1图2-1中的机械臂,灰色立方体为机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色为关节2,它能绕图中的Z1轴旋转;蓝色为关节3,它能绕图中的Z2轴旋转;绿色为关节4,它能绕图中的X3轴旋转;红色为关节5,它能绕图中的Z4轴旋转;黄色为关节6,它能绕图中的X5轴旋转。
2.2齐次变换矩阵齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。
首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为-60度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为+60度。
六自由度机械臂控制系统设计与运动学仿真一、本文概述随着机器人技术的快速发展,六自由度机械臂作为一种重要的机器人执行机构,在工业自动化、航空航天、医疗手术等领域得到了广泛应用。
六自由度机械臂控制系统设计与运动学仿真研究对于提高机械臂的运动性能、优化控制策略以及实现高精度操作具有重要意义。
本文旨在深入探讨六自由度机械臂控制系统的设计原理与实现方法,并通过运动学仿真验证控制系统的有效性和可靠性。
本文将首先介绍六自由度机械臂的基本结构和运动学原理,包括机械臂的正运动学和逆运动学分析。
在此基础上,详细阐述六自由度机械臂控制系统的总体设计方案,包括硬件平台的选择、控制算法的设计以及传感器的配置等。
接着,本文将重点介绍控制系统的核心算法,如路径规划、轨迹跟踪、力控制等,并分析这些算法在六自由度机械臂运动控制中的应用。
为了验证控制系统的性能,本文将进行运动学仿真实验。
通过构建六自由度机械臂的运动学模型,模拟机械臂在不同工作环境下的运动过程,并分析控制系统的实时响应、运动精度以及稳定性等指标。
本文将总结六自由度机械臂控制系统设计与运动学仿真的研究成果,并展望未来的研究方向和应用前景。
通过本文的研究,旨在为六自由度机械臂控制系统的设计与优化提供理论支持和实践指导,推动机器人技术在各领域的广泛应用和发展。
二、六自由度机械臂基本理论六自由度机械臂,又称6DOF机械臂,是现代机器人技术中的重要组成部分。
其理论基础涉及机构学、运动学、动力学以及控制理论等多个领域。
六自由度机械臂之所以得名,是因为其末端执行器(如手爪、工具等)可以在三维空间中实现六个方向上的独立运动,包括三个平移运动(沿、Y、Z轴的移动)和三个旋转运动(绕、Y、Z轴的转动)。
机构学基础:六自由度机械臂的机构设计是其功能实现的前提。
通常,它由多个连杆和关节组成,每个关节都有一个或多个自由度。
通过合理设计连杆的长度和关节的配置,可以实现末端执行器在所需空间内的灵活运动。
一类不满足Pieper准则的六自由度串联机器人运动学和动力学分析工业机器人凭借其特有的良性结构和柔性控制方式,具有传统机械无可比拟的优势,被广泛应用于各行各业。
随着机器人相关技术和应用领域的不断发展,串联机器人构型已经不再拘泥于满足Pieper准则存在的条件,优傲机器人公司开发的UR10机器人和上海交通大学的“神刀华佗”手术机器人这类不满足Pieper 准则的串联机器人也相继问世。
虽然这种不满足Pieper准则的串联机器人在设计方式上很好的避免了因传统内嵌式设计引发的机器人末端姿态调整范围被严重限制的问题,但也使得它的运动学和动力学算法求解变得异常的困难。
因为上述类型的串联机器人是无法通过常规的求解方法求解出其精确的解析解。
针对这一问题,本文提出了一种以原有不满足Pieper准则串联机器人转换成满足Pieper准则的串联机器人为原则,用辅助标记法作为辅助方式的解析法求解方法。
该方法在一定程度上克服了六自由度串联机器人无法通过常规解析法进行运动学求解的问题。
在对其冗余解进行选择时,采用工作区域划分的方法,不仅大大减少机器人运动学原有的计算量,提高其整体运算速度。
同时,为了机器人能够走出可靠、连续而且准确的运动轨迹,对该类机器人的退化问题也进行了相应的分析。
接着,对机器人的速度分析、静力学分析和动力学进行了相关分析。
速度分析、静力学分析和动力学分析为各关节驱动力或驱动力矩和机器人各关节运动参数搭建了一个良好的沟通桥梁,不仅为机器人的运动和控制提供参考的依据,也为分析系统的动态性能提供了有效的数据支撑。
然后,依据之前求解出的运动学方程与动力学方程,对机器人在运行过程中可能遇到的碰撞问题进行相应分类处理和分析。
机器人碰撞问题进行相应分类处理和分析不仅有利于提高机器人在整个运动过程中安全性和稳定性,确保其能走出连续、均匀的运动轨迹,还为之后的机器人整体控制和机器人机构优化设计提供了可靠的理论依据。
随后,通过Matlab软件对前文中对求解出的运动学方程与动力学方程进行相关仿真验证。