两轴伺服控制系统设计
- 格式:docx
- 大小:37.29 KB
- 文档页数:3


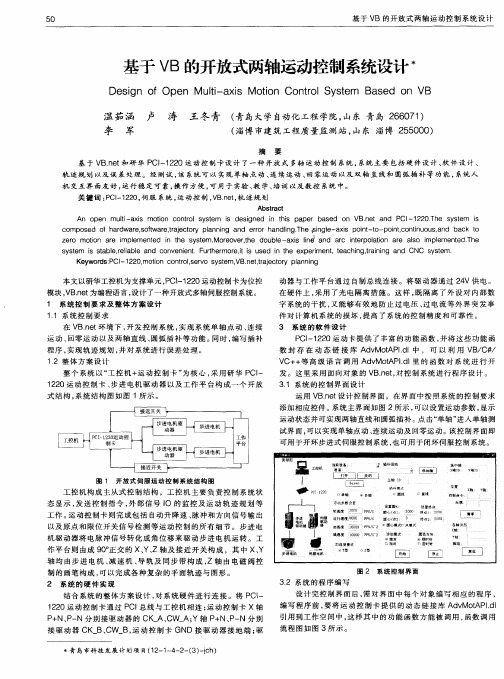
伺服系统的设计要求、步骤、方法伺服系统结构上的复杂性,决定了其设计过程的复杂性。
实际伺服系统的设计是很难一次成功的,往往都要经过多次反复修改和调试才能获得满意的结果。
下面仅对伺服系统设计的一般步骤和方法作一简单介绍。
伺服系统设计要求1、稳定性伺服系统的稳定性指在系统上的扰动信号消失后,系统能够恢复到原来的稳定状态下运行,或者在输入的指令信号作用下,能够达到的新的稳定运行状态的能力。
稳定性要求是一项最基本的要求,是保证伺服系统能够正常运行的最基本条件。
2、精度伺服系统的精度是指其输出量复现输入指令信号的精确程度。
系统中各个元件的误差都会影响到系统的精度,如传感器的灵敏度和精度、伺服放大器的零点漂移和死区误差、机械装置中的反向间隙和传动误差、各元器件的非线性因素等。
反映在伺服系统_上就会表现出动态误差、稳态误差和静态误差,伺服系统应在比较经济的条件下达到给定的精度。
3、快速响应性快速响应性是指系统输出量快速跟随输入指令信号变化的能力,它主要取决于系统的阻尼比和固有频率可以提高快速响应性,但对系统的稳定性和最大超调量有不利影响,因此系统设计时应该对两者进行优化,使系统的输出响应速度尽可能快。
4、灵敏度系统各元件的参数变化等都会影响系统的性能,系统对这些变化的灵敏度要小,即系统的性能应不受参数变化的影响。
具体措施为:对于开环系统,应严格挑选各元件;对于闭环系统,对输出通道中元件的挑选标准可适当放宽,对反馈通道的各元件必须严格挑选,以改善系统的灵敏度。
伺服系统设计步骤及方法1、设计要求分析,系统方案设计首先对伺服系统的设计要求进行分析,明确其应用场合和目的、基本性能指标及其它性能指标,然后根据现有技术条件拟定几种技术方案,经过评价、对比,选定一种比较合理的方案。
方案设计应包括下述一些内容:控制方式选择;执行元件选择;传感器及其检测装置选择;机械传动及执行机构选择等。
方案设计是系统设计的第一步,各构成环节的选择只是初步的,还要在详细设计阶段进一步修改确定。


1200plc两轴伺服画圆等运动控制案例1200PLC两轴伺服画圆等运动控制案例引言:自从工业自动化技术的应用,伺服系统开始成为各种机械设备中不可或缺的一环。
具备高精度和高速性能的伺服系统在现代工业中被广泛运用,能够实现各种复杂的运动控制要求。
本文将介绍一个基于1200PLC的两轴伺服画圆等运动控制案例,详细阐述其实现原理和应用场景。
第一节:概述伺服系统是自动化控制系统的一个关键部分,通过对电动机的控制,实现对机械设备的准确定位和运动控制。
而本案例中所使用的1200PLC 是一种基于PLC技术的控制器,能够满足多轴控制、精密定位和实时反馈等要求。
该案例主要利用1200PLC通过对两个伺服电机的控制,实现了画圆等复杂运动控制。
第二节:实现原理该案例中的两轴伺服画圆等运动控制,是通过对伺服电机的位置控制来达到目的。
首先,通过PLC与伺服控制器进行通讯,控制伺服电机的运动。
然后,利用系统中的编码器检测反馈信号,将位置反馈给PLC。
最后,通过PLC的控制算法,实时调整电机的输出信号,从而控制电机的位置和速度。
第三节:应用场景该案例的应用场景广泛,可以用于各种需要高精度和高速运动控制的机械设备。
比如在激光切割机中,需要对激光光束进行精准定位和运动控制,通过该案例中的伺服系统可以实现对切割位置和速度的控制。
又比如在机械加工中心中,需要对刀具进行精确定位和运动控制,通过该案例中的伺服系统可以实现对加工路径的控制。
结论:通过本案例的介绍,我们可以看到1200PLC两轴伺服画圆等运动控制的实现原理和应用场景。
伺服系统在现代工业中的应用越来越广泛,通过对电动机的控制,能够实现各种复杂的运动控制要求。
而基于PLC 的控制器可以满足多轴控制、精密定位和实时反馈等要求,为工业自动化提供了强有力的支持。
该案例所呈现的两轴伺服画圆等运动控制,具备高精度和高速性能,适用于各种机械设备的运动控制需求。
伺服系统设计步骤及方法伺服系统是指一种能够控制运动精度和位置的系统,常见于工业自动化、机器人、汽车等领域。
伺服系统设计的主要目标是提高系统的稳定性、响应速度和控制精度。
在设计伺服系统时,需要按照一定的步骤和方法进行,以确保系统能够满足要求。
下面是伺服系统设计的一般步骤及方法:1.定义系统需求:首先确定伺服系统的工作环境、运动要求和性能指标。
例如,确定系统需要在何种速度、加速度和精度下运动,以及要控制的负载和环境条件等。
2.选择伺服驱动器和电机:根据系统的需求,选择合适的伺服驱动器和电机。
此步骤需要考虑到系统的负载特性、控制精度、电源电压和电流等。
通常,选择驱动器时需要考虑其速度和定位控制的能力,选择电机时需要考虑其功率、转矩和惯性等。
3.确定控制方式:根据系统需求,确定使用的控制方式,包括位置控制、速度控制和力控制等。
对于不同的应用场景,选择合适的控制方式可以提高系统的控制效果和稳定性。
4.设计控制算法:根据系统需求和控制方式,设计控制算法。
常用的控制算法包括PID控制、滑模控制和模糊控制等。
控制算法的目标是根据系统的输入和输出,以最优的方式控制电机的速度和位置。
5.选择传感器和反馈装置:为了实现对伺服系统的准确控制,通常需要选择合适的传感器和反馈装置,用于测量和反馈系统的位置、速度和加速度信息。
常用的传感器包括编码器、光电开关和位移传感器等。
6.确定反馈控制回路:根据系统需求和传感器的信息,确定系统的反馈控制回路。
反馈控制回路可以根据测量值对系统进行修正和调整,以实现更精确的控制。
同时,反馈控制还可以稳定系统的工作状态,并减小由于负载变化和环境干扰引起的系统波动。
7.运动规划和轨迹生成:根据系统的运动需求和控制算法,进行运动规划和轨迹生成。
运动规划是指通过规划器生成一条供伺服驱动器执行的运动轨迹。
轨迹生成是指将运动规划生成的轨迹转化为伺服驱动器可以执行的轨迹。
8.系统调试和优化:完成系统的硬件搭建和软件编程后,进行系统调试和优化工作。
中北大学课程设计说明书学生姓名:杜宝林学号:0902014128学院:机械工程与自动化学院专业:机械设计制造及其自动化题目:数控技术课程设计——基于PLC的两轴联动进给控制系统设计指导教师:马维金职称: 教授张吉堂职称: 教授2012年12月28日中北大学课程设计任务书2012/2013 学年第 1 学期学院:机械工程与自动化学院专业:机械设计制造及其自动化学生姓名:杜宝林学号:0902014128 题目:数控技术课程设计——基于PLC的两轴联动进给控制系统设计起迄日期:12 月22日~12月28日课程设计地点:教学二号楼指导教师:马维金教授系主任:王彪下达任务书日期: 2012年12月21日课程设计任务书课程设计任务书基于PLC的两轴联动进给控制系统的设计目录1.基本模块组成---------------------------------------------------------------------------61.1.运动控制模块简介-----------------------------------------------------------------62.交流伺服电机选型---------------------------------------------------------------------73.硬件系统设计---------------------------------------------------------------------------104.软件系统设计---------------------------------------------------------------------------125.三菱FX2N-20GM硬件与编程--------------------------------------146.编写定位程序---------------------------------------------------------------------------157.操作命令表------------------------------------------------------------------------------168.双轴伺服控制系统电气原理图------------------------------------169.运行与仿真----------------------------------------------------1710.总结---------------------------------------------------------1811.参考资料-----------------------------------------------------18基于PLC的两轴联动进给控制系统设计1基本模块组成在当代工业控制领域中,PLC一直拥有不可比拟的优越性,而工业控制水平的日趋提高也给 PLC提出了更高的控制要求。
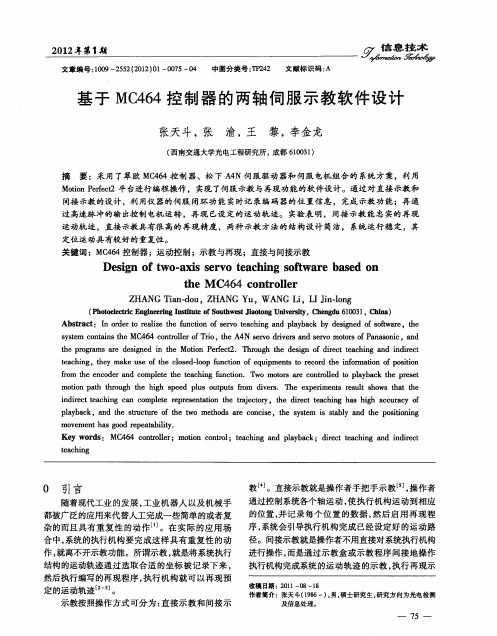
两轴角振动台加速度伺服控制器设计杨宁宁;关广丰;熊伟;王海涛【期刊名称】《机床与液压》【年(卷),期】2012(40)24【摘要】The design of acceleration servo controller is presented in this paper to improve the control precision of a two-axis vibration table.The degree-of-freedom synthesis and decomposing matrices are obtained based on the geometry relationship of two hydraulic actuators.The threevariable feed-forward controller,which is favorable to improve the stability as well as the system's damping ratio,is used to extend acceleration frequency band of the system.The input filter is used to achieve acceleration control of the vibration table and a real-time control system of the angle vibration table is developed by using matlab/XPC toolbox.Finally,the effectiveness of the acceleration servo controller was verified by using the experimental results.%以两轴角振动台为研究对象,设计角振动台加速度伺服控制器.依据各液压缸间的几何位置关系求取自由度合成及分解矩阵.采用三状态顺馈控制器提高系统的加速度响应频宽,采用三状态反馈控制器改善系统的稳定性,提高系统的阻尼比,采用输入滤波器实现角振动台的加速度控制.利用Matlab/XPC工具箱开发了两轴角振动台实时控制系统.最后,通过实验验证了所设计加速度伺服控制器的有效性.【总页数】4页(P85-88)【作者】杨宁宁;关广丰;熊伟;王海涛【作者单位】大连海事大学,大连116026【正文语种】中文【中图分类】TH16【相关文献】1.汽车自动变速器输出轴角加速度检测通道的设计与实现 [J], 董铸荣;梁松峰;贺萍2.一种转轴角加速度测量系统的设计 [J], 邵帅3.船厂数控切割机两轴联动伺服控制器的PC模板化设计 [J], 周永鹏;何顶新4.PIND振动台加速度自动标定系统设计 [J], 牛鹏飞;赵国强;梁安生;翟国富5.基于FPGA的电液振动台数字伺服控制器设计 [J], 舒杨;宋琼;黎启胜;牛宝良因版权原因,仅展示原文概要,查看原文内容请购买。
两轴伺服控制系统设计
伺服控制系统是一种能够精确控制运动过程中位置、速度和力度的系统,常用于机械、自动化和机器人领域。
在此,我们将设计一个两轴伺服
控制系统,用于控制一个机器人的两个关节。
系统结构设计:
1.控制器:使用一款高性能的双轴伺服控制器,能够实现对两个轴的
独立控制,并具有足够的计算能力和通信接口。
2.编码器:每个关节安装一个编码器,用于实时反馈关节的位置信息,以便控制器实现闭环控制。
3.伺服驱动器:每个关节连接一个伺服驱动器,用于控制伺服电机的
速度和位置,以实现对关节的精确控制。
4.伺服电机:每个关节使用一款高性能的伺服电机,具有高转矩和响
应速度,能够满足机器人关节的动力需求。
5.通信接口:控制器与计算机或人机界面之间通过以太网或串口通信,实现参数设置和监控功能。
系统功能设计:
1.其中一个轴作为主轴,另一个轴作为从轴,主轴和从轴之间通过齿
轮传动或同步带传动连接。
2.控制器通过内置的PID控制算法实现对主轴和从轴的位置控制,可
以实现位置或速度控制模式。
3.控制器通过接收编码器反馈信号,实时计算主轴和从轴的位置误差,不断调整伺服电机的输出信号,使得两个轴的位置保持一致。
4.控制器具有多段加减速功能,可以设置不同的加减速时间和速度曲线,实现平滑的运动过程。
5.控制器具有位置误差补偿功能,可以根据实际应用场景进行参数调整,提高系统的稳定性和精度。
6.用户可以通过计算机或人机界面对系统参数进行设置和监控,实现
对系统的远程控制和故障诊断。
系统性能设计:
1.系统具有高精度的位置控制能力,可以实现微米级的定位精度,满
足高精度加工和装配应用的要求。
2.系统具有高响应速度和稳定性,能够在短时间内完成复杂的运动任务,确保机器人的稳定性和可靠性。
3.系统具有较强的负载能力,能够承受较大的负载力和惯性力,保证
机器人在运动过程中不产生位移和抖动。
4.系统具有较高的可靠性和稳定性,能够长时间稳定运行,减少故障
率和维护成本。
5.系统具有较好的实时性和可调性,能够根据不同的应用需求灵活调
整参数,实现不同的运动控制模式。
通过以上设计,我们可以实现一个稳定、高效的两轴伺服控制系统,
用于控制机器人的运动,实现精准和复杂的动作任务。
该系统具有高精度、
高可靠性和高稳定性的特点,适用于机械加工、自动化装配、医疗器械和机器人等领域的应用。