平面铰链四杆机构讲解
- 格式:ppt
- 大小:19.53 MB
- 文档页数:24

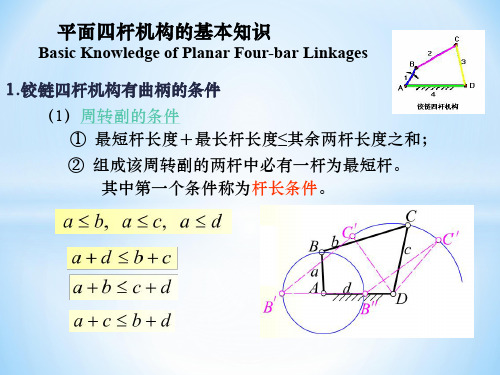
铰链四杆机构名词解释铰链四杆机构是一种具有高度的灵活性和耐久性的精密机构,它是运动学上重要的一种机构。
它能够实现精确的位置和姿态控制,并能够通过输出四自由度(X、Y、Z方向及旋转)精确地控制它的运动轨迹。
它的结构往往由四个杆件和大量的铰链组成,是一种可以极其灵活地实现不同的运动控制的机构,在应用中可以被用于数控机床、控制机器人、控制可编程机器等等。
结构上来说,铰链四杆机构由四个杆件和大量的铰链组成,其四杆件分别安装在铰链中,并加上关节连接在一起,这四杆件就构成了一个固定的体系。
其中铰链的数量可根据不同的应用而定,有些包括4-6条铰链、有些包括8-12条铰链,甚至有些可以包括16-18条铰链,其余件均按照铰链的设计和参数要求进行装配并安装好。
铰链四杆机构的主要优势就在于其灵活性高和耐久性强。
由于其采用了大量的连接杆件来构成,其运动轨迹非常灵活,且具有很好的耐久性。
此外,它的功率利用率也相对较高,可以产生大量的力,能够在较大的轨迹范围内进行良好的操作,因此也是一种理想的运动控制机构。
另外,由于铰链四杆机构的体积比较小,它可以被广泛用于多个用途,如它可以应用于机器人运动控制、家用和工业用电器、AV机器人控制、坐式控制机器人以及植物鉴定机等等。
同时,它可以应用于研发视觉系统、精密仪器和仪表控制,可以按照客户的要求定制,以满足不同环境下的应用要求。
此外,铰链四杆机构还具有优良的抗干扰能力,由于在其结构上采用了固定的夹紧结构,它可以有效地抵抗外界的干扰,以及在运动控制过程中出现的扰动,因此也比较适合应用于工业环境下的控制机构。
总的来说,铰链四杆机构是一种具有高度灵活性和耐久性的机构,它可以实现精确的位置控制,从而满足不同的应用需求。
它的结构简单易于安装,具有良好的抗干扰能力,能够在工业环境中发挥良好的性能。

铰链四杆机构简图工作原理
铰链四杆机构是一种常用于机械传动和运动变换的连杆机构,由四个连杆和若干个铰链连接而成。
简图工作原理如下:
1. 四个连杆由多个铰接点连接起来,整个机构可以自由地旋转和移动。
2. 其中两个连杆称为主动连杆,另外两个则称为从动连杆。
3. 主动连杆通过某种动力源(例如电机或手动摇把)提供动力,使其运动。
4. 主动连杆的运动被传递到从动连杆上,从而实现机构的工作。
5. 运动方式可以是旋转、直线运动或复杂的曲线运动,根据实际需求进行设计。
6. 通过合理的设计和调整铰链四杆机构的连杆参数,可以实现各种不同的运动要求和工作效果。
铰链四杆机构的工作原理基于连杆的运动传递和约束,通过不同的铰链布置和参数调整,可以实现多种不同的运动模式和功能。
这种简图工作原理可以被应用在各种不同的机械装置中,如机械臂、自动门、汽车悬挂系统等。

平面铰链四杆机构分类1. 介绍平面铰链四杆机构是一种常见的机械结构,由四个杆件和若干个铰链连接而成。
它具有简单、可靠、可控性好等特点,在机械设计中得到广泛应用。
本文将对平面铰链四杆机构进行分类,并介绍每种分类的特点和应用。
2. 分类2.1 单自由度四杆机构单自由度四杆机构是指只有一个活动连接件(也称为驱动件)的四杆机构。
这种机构可以实现一个自由度的运动,常见的有曲柄滑块机构和双曲柄滑块机构。
2.1.1 曲柄滑块机构曲柄滑块机构由一个旋转的曲柄和一个直线运动的滑块组成。
通过改变曲柄的旋转角度,可以实现滑块的往复直线运动。
曲柄滑块机构广泛应用于发动机、压力机等领域。
2.1.2 双曲柄滑块机构双曲柄滑块机构是指两个曲柄与一个滑块组成的机构。
与曲柄滑块机构相比,双曲柄滑块机构可以实现更复杂的运动轨迹,具有更广泛的应用。
双曲柄滑块机构常用于绘图仪、印刷机等设备中。
2.2 多自由度四杆机构多自由度四杆机构是指有多个活动连接件(驱动件)的四杆机构。
这种机构可以实现多个自由度的运动,常见的有平行四杆机构和串联四杆机构。
2.2.1 平行四杆机构平行四杆机构是指由两个平行排列的驱动件和两个平行排列的从动件组成的机构。
它可以实现平面内任意点的直线运动,并且具有较高的精度和刚性。
平行四杆机构广泛应用于工业生产线上,用于传输、装配等工作。
2.2.2 串联四杆机构串联四杆机构是指由一个驱动件和三个从动件组成的机构。
它可以实现复杂的运动轨迹,并且具有较高的自由度。
串联四杆机构常用于医疗器械、机器人等领域,用于实现复杂的运动任务。
3. 应用3.1 工业生产线平面铰链四杆机构在工业生产线上广泛应用。
曲柄滑块机构常用于压力机、冲床等设备中,用于实现往复运动;平行四杆机构常用于传输线上,用于实现物料的输送和装配。
3.2 机器人平面铰链四杆机构在机器人领域也有着重要的应用。
串联四杆机构可以用于实现机器人的手臂运动,使其能够完成复杂的操作任务;双曲柄滑块机构可以被应用在机器人的关节传动中。

第8章第5讲平面四杆机构的设计——解析法平面四杆机构是机械工程中常用的一种机构,它由4个连接杆组成,通过连接杆与铰链的连接方式,能够实现不同形式的运动。
平面四杆机构的设计可以采用解析法,该方法通过解析机构的运动学性质和机构参数,来确定机构的设计参数和结构尺寸。
在平面四杆机构的解析法设计中,首先需要确定机构的运动类型。
根据机构的运动要求和工作环境,可以选择不同的运动类型,如平行移动、旋转、复杂曲线轨迹等。
运动类型的选择将对机构的结构设计和参数确定产生重要影响。
接下来,需要确定机构的工作原理和结构特点。
根据机构的运动类型,可以选择不同的结构形式,如平行四杆机构、向心四杆机构、菱形四杆机构等。
不同的结构形式具有不同的运动学特性和工作原理,需要根据实际需求进行选择。
确定机构的杆件长度和角度。
在机构设计中,杆件的长度和角度是关键的设计参数。
杆件的长度决定了机构的尺寸和工作范围,而杆件的角度决定了机构的运动轨迹和运动特性。
通过分析机构的运动学方程和几何方程,可以确定机构的杆件长度和角度。
确定机构的铰链位置。
铰链的位置决定了杆件之间的连接方式和机构的运动特性。
通过分析机构的力学平衡条件和运动学方程,可以确定机构的铰链位置,使机构能够实现所需要的运动要求。
最后,进行机构的参数优化和结构优化。
根据机构的运动学性能和工作要求,可以对机构的结构参数进行优化,使机构的运动特性更加优秀。
同时,还需要对机构的结构进行优化,提高机构的强度和刚度,确保机构在工作过程中的可靠性和稳定性。
通过解析法进行平面四杆机构的设计,可以使机构的结构和性能更加合理和可靠。
这种设计方法具有简单易行、工程实用性强的特点,是一种常用的机构设计方法。
在实际的机械设计中,可以根据具体的需求和实际情况,采用解析法进行平面四杆机构的设计,以提高机构的性能和工作效果。
平面铰链四杆机构分类一、引言平面铰链四杆机构是一种常见的机械传动结构,由四个杆件通过铰链连接而成。
它具有简单、可靠、刚性好等优点,在机械领域有着广泛的应用。
本文将对平面铰链四杆机构进行分类和分析,以期更好地了解和应用这一机构。
二、分类平面铰链四杆机构可以根据其杆件的链接关系和机构的运动方式进行分类。
2.1 根据杆件链接关系分类•对称四杆机构:四个杆件两两对称连接,形成一个对称的结构。
常见的具有对称结构的平面铰链四杆机构有平行四杆机构和梯形四杆机构。
•非对称四杆机构:四个杆件之间没有对称关系,形成一个非对称的结构。
常见的非对称平面铰链四杆机构有双曲线四杆机构和椭圆四杆机构。
2.2 根据机构的运动方式分类•旋转运动四杆机构:机构中至少有一个连杆可以绕铰链进行旋转运动。
例如,摇杆机构和滑块机构都属于旋转运动四杆机构。
•平动运动四杆机构:杆件只能以平动的方式运动,不能绕铰链进行旋转运动。
典型的平动运动四杆机构有单滑块机构和双滑块机构。
三、对称四杆机构3.1 平行四杆机构四杆机构中的两个杆件平行于彼此,并且与另外两个杆件相互垂直。
平行四杆机构有两组平行链接的杆件,因此具有对称的结构。
其机构特点是:•杆件a和b平行,杆件c和d平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
3.2 梯形四杆机构四杆机构中的两个杆件不平行,而是呈现出梯形的形状。
梯形四杆机构同样具有对称结构,其机构特点是:•杆件a和b不平行,杆件c和d不平行;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
四、非对称四杆机构4.1 双曲线四杆机构四杆机构中的杆件连接形成一个双曲线的形状,因此称为双曲线四杆机构。
其机构特点是:•杆件a和b彼此相交,杆件c和d彼此相交;•杆件a和d通过铰链连接,形成了机构的链接框架;•杆件b和c通过其他的铰链连接。
4.2 椭圆四杆机构四杆机构中的杆件连接形成一个椭圆的形状,因此称为椭圆四杆机构。