最大转矩电流比控制的计算简介
- 格式:docx
- 大小:526.15 KB
- 文档页数:8
电机转矩、功率、转速之间的关系及计算公式电动机输出转矩:使机械元件转动的力矩称为转动力矩,简称转矩。
机械元件在转矩作用下都会产生一定程度的扭转变形,故转矩有时又称为扭矩。
转矩与功率及转速的关系:转矩(T)=9550*功率(P)/转速(n)? 即:T=9550P/n—公式【1】由此可推导出:转矩=9550*功率/转速《===》功率=转速*转矩/9550,即P=Tn/9550——公式【2】方程式中:P—功率的单位(kW);n—转速的单位(r/min);T—转矩的单位(N.m);9550是计算系数。
电机扭矩计算公式 T=9550P/n 是如何计算的呢?分析:功率=力*速度即 P=F*V---————公式【3】转矩(T)=扭力(F)*作用半径(R) 推出F=T/R---——公式【4】线速度(V)=2πR*每秒转速(n秒)=2πR*每分转速(n分)/60=πR*n分/30---——公式【5】将公式【4】、【5】代入公式【3】得:P=F*V=T/R*πR*n分/30 =π/30*T*n分-----P=功率单位W, T=转矩单位N.m, n分=每分钟转速单位转/分钟如果将P的单位换成KW,那么就是如下公式:P*1000=π/30*T*n30000/π*P=T*n30000/3.1415926*P=T*n9549.297*P=T*n这就是为什么会有功率和转矩*转速之间有个9550的系数关系。
电动机转矩、转速、电压、电流之间的关系由于电功率P=电压U*电流I,即 P=UI————公式【6】由于公式【2】中的功率P的单位为kw,而电压U的单位是V,电流I的单位是A,而UI乘积的单位是V.A,即w,所以将公式【6】代入到公式【2】中时,UI需要除以1000以统一单位。
则:P=Tn/9550=UI/1000————公式【7】==》Tn/9.55=UI————公式【8】==》T=9.55UI/n————公式【9】==》U=Tn/9.55I————公式【10】==》I=9.55U/Tn————公式【11】方程式【7】、【8】、【9】、【10】、【11】中:P—功率的单位(kW);n—转速的单位(r/min);T—转矩的单位(N.m);U—电压的单位(V);I—电流的单位(A);9.55是9500÷1000之后的值。

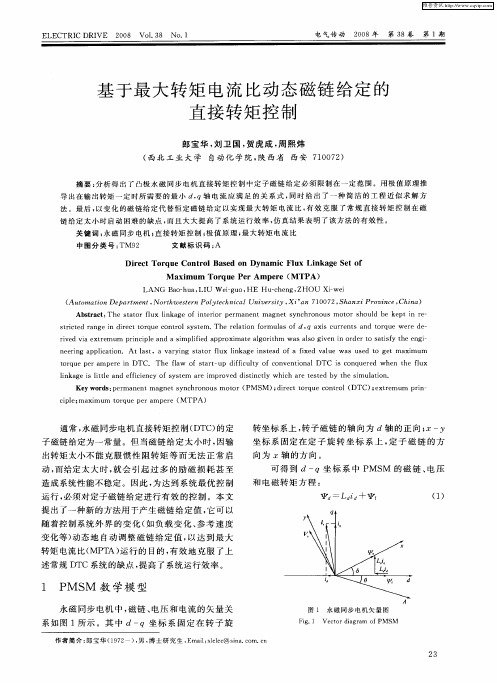
永磁同步电机最大转矩电流比控制一、本文概述Overview of this article随着能源危机和环境污染问题的日益严重,高效、环保的电机驱动系统成为了现代工业领域的研究热点。
永磁同步电机(PMSM)作为一种高性能的电机类型,因其高效率、高功率密度和良好的调速性能而被广泛应用于电动汽车、风力发电、机床设备等领域。
然而,为了充分发挥永磁同步电机的性能优势,有效的控制策略是至关重要的。
本文着重研究永磁同步电机的最大转矩电流比(MTPA)控制策略,旨在实现电机的高效、稳定运行。
With the increasing severity of energy crisis and environmental pollution, efficient and environmentally friendly motor drive systems have become a research hotspot in the modern industrial field. Permanent magnet synchronous motor (PMSM), as a high-performance motor type, is widely used in fields such as electric vehicles, wind power generation, and machine equipment due to its high efficiency, high power density, and good speed regulation performance. However, inorder to fully leverage the performance advantages of permanent magnet synchronous motors, effective control strategies are crucial. This article focuses on the maximum torque to current ratio (MTPA) control strategy of permanent magnet synchronous motors, aiming to achieve efficient and stable operation of the motor.最大转矩电流比控制是一种优化电机运行性能的控制方法,它通过调整电机的电流矢量,使得电机在相同电流幅值下产生最大的转矩输出。

电机转矩、功率、转速之间的关系及计算公式电动机输出转矩:使机械元件转动的力矩称为转动力矩,简称转矩。
机械元件在转矩作用下都会产生一定程度的扭转变形,故转矩有时又称为扭矩。
转矩与功率及转速的关系:转矩(T)=9550*功率(P)/转速(n) 即:T=9550P/n—公式【1】由此可推导出:转矩=9550*功率/转速《===》功率=转速*转矩/9550,即P=Tn/9550——公式【2】方程式中:P—功率的单位(k W);n—转速的单位(r/min);T—转矩的单位(N.m);9550是计算系数。
电机扭矩计算公式T=9550P/n 是如何计算的呢?分析:功率=力*速度即P=F*V---————公式【3】转矩(T)=扭力(F)*作用半径(R) 推出F=T/R---——公式【4】线速度(V)=2πR*每秒转速(n秒)=2πR*每分转速(n分)/60=πR*n分/30---——公式【5】将公式【4】、【5】代入公式【3】得:P=F*V=T/R*πR*n分/30 =π/30*T*n分-----P=功率单位W,T=转矩单位N.m,n分=每分钟转速单位转/分钟如果将P的单位换成KW,那么就是如下公式:P*1000=π/30*T*n30000/π*P=T*n30000/3.1415926*P=T*n9549.297*P=T*n这就是为什么会有功率和转矩*转速之间有个9550的系数关系。
电动机转矩、转速、电压、电流之间的关系由于电功率P=电压U*电流I,即P=UI————公式【6】由于公式【2】中的功率P的单位为kw,而电压U的单位是V,电流I的单位是A,而UI乘积的单位是V.A,即w,所以将公式【6】代入到公式【2】中时,UI需要除以1000以统一单位。
则:P=Tn/9550=UI/1000————公式【7】==》Tn/9.55=UI————公式【8】==》T=9.55UI/n————公式【9】==》U=Tn/9.55I————公式【10】==》I=9.55U/Tn————公式【11】方程式【7】、【8】、【9】、【10】、【11】中:P—功率的单位(k W);n—转速的单位(r/min);T—转矩的单位(N.m);U—电压的单位(V);I—电流的单位(A);9.55是9500÷1000之后的值。

额定电压下最大转矩与额定转矩之比的保证值倍数概述1. 电机的额定电压与额定转矩是电机性能的两个重要参数,它们直接影响着电机的使用效果和性能稳定性。
2. 额定电压下最大转矩与额定转矩之比的保证值倍数是衡量电机性能稳定性和安全性的重要指标。
3. 本文将从电机性能参数的定义、额定转矩的计算方法、额定电压下最大转矩的计算方法以及保证值倍数的意义和实际应用等方面对这一指标进行深入探讨。
电机性能参数的定义4. 电机的性能参数包括额定电压、额定转矩、额定电流、额定转速等。
5. 额定电压是指电机设计时所确定的工作电压,通常为交流电源的额定电压,例如220V、380V等。
6. 额定转矩是在额定电压下,电机能够达到的最大连续输出转矩。
额定转矩的计算方法7. 电机的额定转矩通常通过电路原理和电机运行特性参数计算得出。
8. 一般来说,电机的额定转矩可通过以下公式进行计算:额定转矩 = 9550 * 额定功率 / 额定转速。
9. 在电机设计和制造过程中,额定转矩被确定为保证电机在额定工况下长时间稳定运行的重要参考参数。
额定电压下最大转矩的计算方法10. 额定电压下最大转矩是指在额定电压下,电机能够达到的最大输出转矩。
11. 通常情况下,额定电压下最大转矩可通过电动机的等效电路参数和转矩-转速特性曲线等参数计算得出。
保证值倍数的意义和实际应用12. 保证值倍数是指额定电压下最大转矩与额定转矩之比的最小保证值。
13. 保证值倍数越大,说明电机在额定工况下的性能稳定性越高,安全性就会更好。
14. 在电机的选型、设计和使用过程中,保证值倍数可以作为评价电机性能稳定性和安全性的重要指标之一,对于特殊要求的场合,保证值倍数会成为制约因素之一。
结论15. 电机的额定电压下最大转矩与额定转矩之比的保证值倍数是评价电机性能稳定性和安全性的重要指标。
16. 电机制造企业和用户在选择和使用电机时,应充分重视保证值倍数这一指标,以确保电机的稳定性和安全性。

永磁同步电机弱磁控制的控制策略研究摘要永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。
基于它的优越性,永磁同步电机获得了广泛的研究和应用.本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。
关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机一、永磁同步电机弱磁控制研究现状1.永磁同步电机及其控制技术的发展任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。
直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。
因此,交流电机的转矩控制性能不佳。
经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。
1.1 矢量控制1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。
矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。
1.2 恒压频比控制恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。
但是它依据电机的稳态模型,从而得不到理想的动态控制性能。
要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。
电机转矩、功率、转速之间的关系及计算公式电动机输出转矩:使机械元件转动的力矩称为转动力矩,简称转矩。
机械元件在转矩作用下都会产生一定程度的扭转变形,故转矩有时又称为扭矩。
转矩与功率及转速的关系:转矩(T)=9550*功率(P)/转速(n) 即:T=9550P/n—公式【1】由此可推导出:转矩=9550*功率/转速《===》功率=转速*转矩/9550,即P=Tn/9550——公式【2】方程式中:P—功率的单位(kW);n—转速的单位(r/min);T—转矩的单位(N.m);9550是计算系数。
电机扭矩计算公式T=9550P/n 是如何计算的呢?分析:功率=力*速度即P=F*V---————公式【3】转矩(T)=扭力(F)*作用半径(R) 推出F=T/R---——公式【4】线速度(V)=2πR*每秒转速(n秒)=2πR*每分转速(n分)/60=πR*n分/30---——公式【5】将公式【4】、【5】代入公式【3】得:P=F*V=T/R*πR*n分/30 =π/30*T*n分-----P=功率单位W,T=转矩单位N.m,n分=每分钟转速单位转/分钟如果将P的单位换成KW,那么就是如下公式:P*1000=π/30*T*n30000/π*P=T*n30000/3.1415926*P=T*n9549.297*P=T*n这就是为什么会有功率和转矩*转速之间有个9550的系数关系。
电动机转矩、转速、电压、电流之间的关系由于电功率P=电压U*电流I,即P=UI————公式【6】由于公式【2】中的功率P的单位为kw,而电压U的单位是V,电流I的单位是A,而UI乘积的单位是V.A,即w,所以将公式【6】代入到公式【2】中时,UI需要除以1000以统一单位。
则:P=Tn/9550=UI/1000————公式【7】==》Tn/9.55=UI————公式【8】==》T=9.55UI/n————公式【9】==》U=Tn/9.55I————公式【10】==》I=9.55U/Tn————公式【11】方程式【7】、【8】、【9】、【10】、【11】中:P—功率的单位(kW);n—转速的单位(r/min);T—转矩的单位(N.m);U—电压的单位(V);I—电流的单位(A);9.55是9500÷1000之后的值。
电机转矩、功率、转速之间的关系及计算公式电动机输出转矩:使机械元件转动的力矩称为转动力矩,简称转矩.机械元件在转矩作用下都会产生一定程度的扭转变形,故转矩有时又称为扭矩。
转矩与功率及转速的关系:转矩(T)=9550*功率(P)/转速(n) 即:T=9550P/n—公式【1】由此可推导出:转矩=9550*功率/转速《===》功率=转速*转矩/9550,即P=Tn/9550--公式【2】方程式中:P—功率的单位(kW);n—转速的单位(r/min);T-转矩的单位(N。
m);9550是计算系数.电机扭矩计算公式 T=9550P/n 是如何计算的呢?分析:功率=力*速度即P=F*V———————公式【3】转矩(T)=扭力(F)*作用半径(R) 推出F=T/R--—--公式【4】线速度(V)=2πR*每秒转速(n秒)=2πR*每分转速(n分)/60=πR*n分/30—----公式【5】将公式【4】、【5】代入公式【3】得:P=F*V=T/R*πR*n分/30 =π/30*T*n分—----P=功率单位W, T=转矩单位N。
m, n分=每分钟转速单位转/分钟如果将P的单位换成KW,那么就是如下公式:P*1000=π/30*T*n30000/π*P=T*n30000/3.1415926*P=T*n9549.297*P=T*n这就是为什么会有功率和转矩*转速之间有个9550的系数关系.。
电动机转矩、转速、电压、电流之间的关系由于电功率P=电压U*电流I,即 P=UI—-——公式【6】由于公式【2】中的功率P的单位为kw,而电压U的单位是V,电流I的单位是A,而UI乘积的单位是V。
A,即w,所以将公式【6】代入到公式【2】中时,UI需要除以1000以统一单位.则:P=Tn/9550=UI/1000————公式【7】==》Tn/9.55=UI——-—公式【8】==》T=9。
55UI/n-———公式【9】==》U=Tn/9。
电机转矩、功率、转速之间的关系及计算公式电动机输出转矩:使机械元件转动的力矩称为转动力矩,简称转矩.机械元件在转矩作用下都会产生一定程度的扭转变形,故转矩有时又称为扭矩。
转矩与功率及转速的关系:转矩(T)=9550*功率(P)/转速(n) 即:T=9550P/n-公式【1】由此可推导出:转矩=9550*功率/转速《===》功率=转速*转矩/9550,即P=Tn/9550——公式【2】方程式中:P—功率的单位(kW);n—转速的单位(r/min);T—转矩的单位(N。
m);9550是计算系数。
电机扭矩计算公式 T=9550P/n 是如何计算的呢?分析:功率=力*速度即 P=F*V—--——-—公式【3】转矩(T)=扭力(F)*作用半径(R) 推出F=T/R——--—公式【4】线速度(V)=2πR*每秒转速(n秒)=2πR*每分转速(n分)/60=πR*n分/30—-——-公式【5】将公式【4】、【5】代入公式【3】得:P=F*V=T/R*πR*n分/30 =π/30*T*n分-—-——P=功率单位W, T=转矩单位N.m, n分=每分钟转速单位转/分钟如果将P的单位换成KW,那么就是如下公式:P*1000=π/30*T*n30000/π*P=T*n30000/3。
1415926*P=T*n9549。
297*P=T*n这就是为什么会有功率和转矩*转速之间有个9550的系数关系。
电动机转矩、转速、电压、电流之间的关系由于电功率P=电压U*电流I,即 P=UI————公式【6】由于公式【2】中的功率P的单位为kw,而电压U的单位是V,电流I的单位是A,而UI乘积的单位是V。
A,即w,所以将公式【6】代入到公式【2】中时,UI需要除以1000以统一单位。
则:P=Tn/9550=UI/1000—-——公式【7】==》Tn/9。
55=UI————公式【8】==》T=9。
55UI/n————公式【9】==》U=Tn/9.55I--——公式【10】==》I=9.55U/Tn————公式【11】方程式【7】、【8】、【9】、【10】、【11】中:P-功率的单位(kW);n-转速的单位(r/min);T—转矩的单位(N.m);U—电压的单位(V);I—电流的单位(A);9。
最大转矩电流比控制方法id=0控制方法在电机输出相同的电磁转矩下电机的定子电流并不是最小的, 因此, 采用最大转矩电流比控制方法, 使得电机在输出相同的电磁转矩下电机定子电流最小,控制流程如下:PMSM控制系统中,3s坐标系到2r坐标系的变换与反变换方程如下:-------(1)--------(2)电磁转矩方程为:--------(3)定子三相电流如下:-----------------------(4)设定子电流幅值为I,则有:---(5)所以有:--------------------------(6)可以看出, 最大转矩电流比可转化为如下极值问题:-------------(7)做辅助函数:-----------(8)求偏导数有:--------------(9)令:化简(9):---------(10)而(10)的非线性方程的偏导数矩阵为:-----------(11)假设I =[Id , Iq]T 在点[Ido , Iqo]T处使式( 11 ) 的矩阵非奇异, 则可由N e w t o n 法得到非线方程组( 10 ) 的解的迭代表达式为:-------(12) 式中:---------(13)将(10)(11)带入(12):----------(14)在实际应用中, 可离线计算出最大转矩电流比中不同的电磁转矩对应的d、q 轴电流, 采用查表的方法实现最大转矩电流比的控制, 不过要占用大量的存储单元, 为了更便于工程实现, 本文按优化方法, 给出实现最大转矩电流比的近似方法。
设采用最大转矩电流比方法时的Id,Iq与电磁转矩Te的方程为:- -------------------(15)根据电磁转矩方程,则有:---------------(16)因此, 当电流环输出严格跟踪主令时, 速度环输出u和电磁转矩成线性关系。
由于例和均为非线性, 采用线性函数来近似:--------------- --------(17)此时电磁转矩方程为:-----------------(18)定子电流幅值为:-----------------(19)速度环调节器输出正比于电机定子电流幅值,但是速度调节器输出和电磁转矩己经是非线性的关系。
最大转矩电流比控制方法
id=0控制方法在电机输出相同的电磁转矩下电机的定子电流并
不是最小的, 因此, 采用最大转矩电流比控制方法, 使得电机在输出相同的电磁转矩下电机定子电流最小,控制流程如下:
PMSM控制系统中,3s坐标系到2r坐标系的变换与反变换方程如下:
-------(1)
--------(2)电磁转矩方程为:
--------(3)定子三相电流如下:
-----------------------(4)
设定子电流幅值为I,则有:
---(5)所以有:
--------------------------(6)可以看出, 最大转矩电流比可转化为如下极值问题:
-------------(7)做辅助函数:
-----------(8)求偏导数有:
--------------(9)令:
化简(9):
---------(10)而(10)的非线性方程的偏导数矩阵为:
-----------(11)假设I =[Id , Iq]T 在点[Ido , Iqo]T处使式( 11 ) 的矩阵非奇异, 则可由N e w t o n 法得到非线方程组( 10 ) 的解的迭代表达式为:
-------(12) 式中:
---------(13)将(10)(11)带入(12):
----------(14)
在实际应用中, 可离线计算出最大转矩电流比中不同的电磁转
矩对应的d、q 轴电流, 采用查表的方法实现最大转矩电流比的控制, 不过要占用大量的存储单元, 为了更便于工程实现, 本文按优化
方法, 给出实现最大转矩电流比的近似方法。
设采用最大转矩电流比方法时的Id,Iq与电磁转矩Te的方程为:
- -------------------(15)
根据电磁转矩方程,则有:
---------------(16)因此, 当电流环输出严格跟踪主令时, 速度环输出u和电磁转矩成线
性关系。
由于例和均为非线性, 采用线性函数来近似:
--------------- --------(17)此时电磁转矩方程为:
-----------------(18)定子电流幅值为:
-----------------(19)速度环调节器输出正比于电机定子电流幅值,但是速度调节器输出和电磁转矩己经是非线性的关系。
为了选择合适的K1和K2, 使得在相同的转矩下, 电机有较小的定子电流, 采用如下的性能指标:
--------------(20)由(18)和(19),当Te 〉0时:
-----------(21)代入(20):
--(22)
-----(23)为使性能指标J (a ) 最大, 求如下的偏导数并令其为0:
---------------(24)化简,令:
则Ko 的迭代解为:
(31)仿真:
其他:
求解上式,由前两个方程式可以得到永磁同步电机直轴电流id和交轴电流iq之间的关系。