最优化方法与最优控制1
- 格式:doc
- 大小:182.00 KB
- 文档页数:4
控制系统中的优化控制理论与方法在控制系统中,优化控制理论与方法是一种重要的技术手段,旨在通过对系统的调整和改进,实现系统性能的最优化。
本文将从优化控制的基本概念、常用的优化控制方法以及优化控制在实际系统中的应用等方面进行阐述。
一、优化控制的基本概念优化控制是指通过对系统参数、结构、控制算法等进行合理设计和调整,使得系统的性能指标达到最优水平的一种控制方法。
其目标是在满足系统动态响应、鲁棒性等基本要求的前提下,使系统的效率、稳定性、鲁棒性等性能指标达到最优。
优化控制理论与方法主要包括数学优化理论、控制理论和计算方法等。
二、常用的优化控制方法1. 最优化理论的应用最优化理论是优化控制的理论基础,主要包括线性规划、非线性规划、动态规划、最优控制等方法。
通过将系统的控制问题转化为一个数学优化问题,可以利用最优化理论的方法求解最优控制策略。
2. PID控制器的优化PID控制器是目前应用最广泛的控制器之一,通过对PID参数的优化,可以提高系统的性能。
常用的PID参数优化方法包括试探法、经验法、遗传算法、粒子群算法等。
3. 模型预测控制模型预测控制是一种基于模型的优化控制方法,通过对系统的动态模型进行建立和优化,可以在一定的预测范围内求解最优控制策略。
模型预测控制主要包括线性模型预测控制、非线性模型预测控制等方法。
4. 自适应控制自适应控制是一种能够自动调整控制器参数的优化控制方法,通过对系统的建模和参数实时调整,可以适应不同工况下的控制需求。
自适应控制主要包括模型参考自适应控制、基于模型的自适应控制等。
三、优化控制在实际系统中的应用优化控制理论与方法在实际系统中有广泛的应用,主要体现在以下几个方面:1. 工业过程控制:优化控制在化工、电力、冶金等工业过程中的应用较为广泛。
通过对控制参数的优化调整,可以提高生产效率、降低能耗、优化产品质量等。
2. 机器人控制:优化控制方法在机器人运动控制、轨迹规划、力控制等方面的应用,可以提高机器人的运动精度、路径规划效果等。

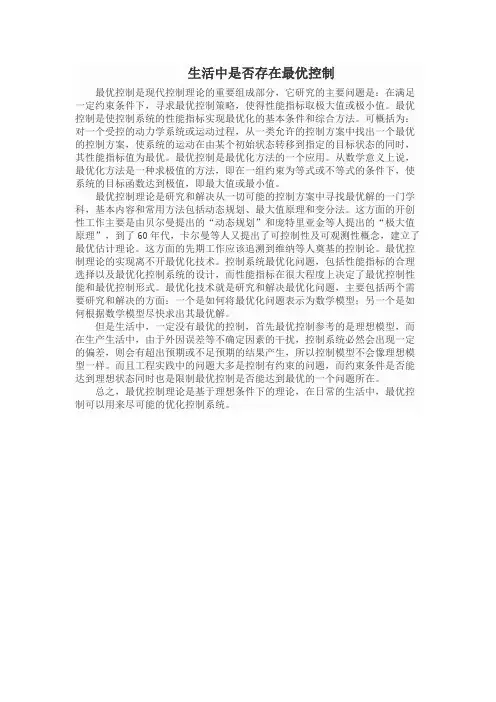
生活中是否存在最优控制最优控制是现代控制理论的重要组成部分,它研究的主要问题是:在满足一定约束条件下,寻求最优控制策略,使得性能指标取极大值或极小值。
最优控制是使控制系统的性能指标实现最优化的基本条件和综合方法。
可概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。
最优控制是最优化方法的一个应用。
从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。
最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科,基本内容和常用方法包括动态规划、最大值原理和变分法。
这方面的开创性工作主要是由贝尔曼提出的“动态规划”和庞特里亚金等人提出的“极大值原理”,到了60年代,卡尔曼等人又提出了可控制性及可观测性概念,建立了最优估计理论。
这方面的先期工作应该追溯到维纳等人奠基的控制论。
最优控制理论的实现离不开最优化技术。
控制系统最优化问题,包括性能指标的合理选择以及最优化控制系统的设计,而性能指标在很大程度上决定了最优控制性能和最优控制形式。
最优化技术就是研究和解决最优化问题,主要包括两个需要研究和解决的方面:一个是如何将最优化问题表示为数学模型;另一个是如何根据数学模型尽快求出其最优解。
但是生活中,一定没有最优的控制,首先最优控制参考的是理想模型,而在生产生活中,由于外因误差等不确定因素的干扰,控制系统必然会出现一定的偏差,则会有超出预期或不足预期的结果产生,所以控制模型不会像理想模型一样。
而且工程实践中的问题大多是控制有约束的问题,而约束条件是否能达到理想状态同时也是限制最优控制是否能达到最优的一个问题所在。
总之,最优控制理论是基于理想条件下的理论,在日常的生活中,最优控制可以用来尽可能的优化控制系统。
控制系统中的最优控制与最优化技术随着科技的不断进步和应用范围的扩大,控制系统在各行各业中的重要性也日益凸显。
最优控制与最优化技术作为控制系统中的重要概念和方法,在提高系统性能和效率方面发挥着关键作用。
本文将就控制系统中的最优控制与最优化技术进行深入探讨。
一、最优控制的定义与概念最优控制是指在满足给定约束条件的前提下,通过使某种性能准则达到最大或最小值来确定控制器参数或控制策略的问题。
最优控制的实现可以使系统在最短时间内达到期望状态或在给定资源条件下获得最佳性能。
最优化技术是实现最优控制的关键方法之一,它利用数学和计算方法来寻找系统中使性能准则达到最大或最小值的最优解。
最优化技术广泛应用于各种领域,例如经济学、工程学、管理学等,其中最为常见的应用是在控制系统中。
二、最优控制的分类最优控制可以分为离散最优控制和连续最优控制两大类。
离散最优控制是指在离散时间点上确定控制器参数或控制策略的问题。
典型的离散最优控制方法包括动态规划、贝尔曼方程等。
连续最优控制是指在连续时间范围内确定控制器参数或控制策略的问题。
常见的连续最优控制方法有经典最优控制、最速控制、最小能耗控制等。
三、最优化技术在控制系统中的应用最优化技术在控制系统中有着广泛的应用。
以下是一些常见的应用领域。
1. 机器人控制机器人控制是利用最优化技术来实现机器人移动、定位和路径规划等问题。
通过对机器人运动过程中的能耗、时间等指标进行优化,可以实现机器人的高效控制和优化运动。
2. 制造业控制在制造业中,最优化技术可以用来优化物料和生产设备的调度、工艺参数的优化以及生产线的平衡等问题。
通过合理地设计和优化控制策略,可以提高制造业的生产效率和产品质量。
3. 能源系统控制能源系统控制是指在能源产生、传输和消费过程中,通过最优化技术实现能源的高效利用。
例如在电力系统中,可以通过最优化技术对电网的输电线路和发电机组进行优化调度,以最大限度地提高电网的稳定性和电能的利用率。
离散控制系统中的优化控制方法在离散控制系统中,优化控制方法被广泛应用于提高系统的性能和效率。
随着离散控制系统在工业自动化领域的重要性不断增加,研究人员提出了各种优化控制方法,以满足不同系统的需求。
本文将探讨离散控制系统中的几种常见优化控制方法,包括模型预测控制、最优控制和遗传算法。
一、模型预测控制模型预测控制(Model Predictive Control,简称MPC)是一种基于数学模型和未来预测的优化控制方法。
它通过建立系统的数学模型,并在每个采样周期内对未来一段时间的状态和输出进行预测,以找到使系统性能最优化的控制策略。
MPC具有优良的鲁棒性和快速响应能力,适用于多变量、非线性、时变系统的控制。
MPC的基本原理是在每个采样周期内,通过数学优化方法求解离散时间下的最优控制问题。
优化目标可以是最小化误差平方和、最小化能耗、最小化响应时间等,具体取决于不同系统的需求。
MPC通过不断优化控制变量的轨迹,使系统能够以最佳控制策略运行。
同时,MPC还可以考虑各种约束条件,如状态变量的上下限、输入变量的约束等,以确保系统的安全性和可靠性。
二、最优控制在离散控制系统中,最优控制是一种常见的优化控制方法。
最优控制旨在找到使系统性能达到最优的控制策略,以满足系统的各种性能指标,如稳定性、响应速度、能耗等。
最优控制方法通常使用优化算法,如线性规划、动态规划、最优化搜索等,以求解离散时间下的最优控制问题。
最优控制方法的主要思想是将系统的控制问题建模成一个优化问题,并使用适当的算法求解最优控制策略。
在离散控制系统中,最优控制方法可以应用于各种系统,如电力系统、交通系统、制造系统等。
最优控制方法的应用可以显著提高系统的性能和效率,使系统能够以最佳的方式运行。
三、遗传算法遗传算法是一种模拟自然进化过程的优化算法,被广泛应用于离散控制系统中的优化问题。
遗传算法通过模拟生物进化过程中的遗传、交叉和突变等操作,以找到系统的最优解。
最优控制问题求解方法综述最优控制问题方法综述班级:姓名:学号:最优控制问题方法综述一、最优控制(optimal control)的一般性描述:最优控制是现代控制理论的核心,它研究的主要问题是:根据已建立的被控对象的时域数学模型或频域数学模型,选择一个容许的控制律,使得被控对象按预定的要求运行,并使给定的某一性能指标达到最优值。
使控制系统的性能指标实现最优化的基本条件和综合方法。
可概括为:对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。
这类问题广泛存在于技术领域或社会问题中。
例如,确定一个最优控制方式使空间飞行器由一个轨道转换到另一轨道过程中燃料消耗最少。
最优控制理论是50年代中期在空间技术的推动下开始形成和发展起来的。
美国学者R.贝尔曼1957年动态规划和前苏联学者L.S.庞特里亚金1958年提出的极大值原理,两者的创立仅相差一年左右。
对最优控制理论的形成和发展起了重要的作用。
线性系统在二次型性能指标下的最优控制问题则是R.E.卡尔曼在60年代初提出和解决的。
从数学上看,确定最优控制问题可以表述为:在运动方程和允许控制范围的约束下,对以控制函数和运动状态为变量的性能指标函数(称为泛函)求取极值(极大值或极小值)。
解决最优控制问题的主要方法有古典变分法(对泛函求极值的一种数学方法)、极大值原理和动态规划。
最优控制已被应用于综合和设计最速控制系统、最省燃料控制系统、最小能耗控制系统、线性调节器等。
研究最优控制问题有力的数学工具是变分理论,而经典变分理论只能够解决控制无约束的问题,但是工程实践中的问题大多是控制有约束的问题,因此出现了现代变分理论。
现代变分理论中最常用的有两种方法。
一种是动态规划法,另一种是极小值原理。
它们都能够很好的解决控制有闭集约束的变分问题。
值得指出的是,动态规划法和极小值原理实质上都属于解析法。
第一章 最优化方法的一般概念人们在处理日常生活、生产过程、经营管理、社会发展等实际问题时,都希望获得最佳的处理结果。
在有多种方案及各种具体措施可供选择时,处理结果与所选取方案和具体措施密切相关。
获取最佳处理结果的问题称为最优化问题。
针对最优化问题,如何选取满足要求的方案和具体措施,使所得结果最佳的方法称为最优化方法。
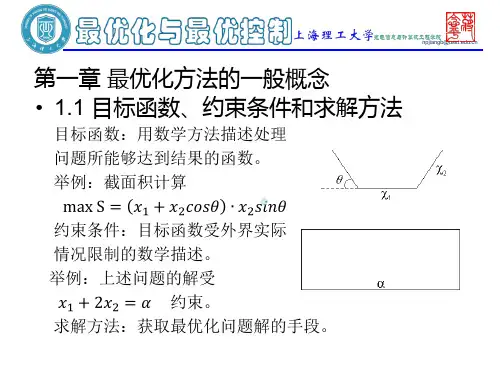
1-1 目标函数、约束条件和求解方法目标函数就是用数学方法描述处理问题所能够达到结果的函数,该函数的自变量是表示可供选择的方案及具体措施的一些参数或函数,最佳结果表现为目标函数取极值。
在处理实际问题时,通常会受到经济效率、物理条件、政策界限等许多方面的限制,这些限制的数学描述称为最优化问题的约束条件。
求解方法是获得最佳结果的必要手段,该方法使目标函数取极值,所得结果称为最优解。
针对各种类型的最优化问题,找出可靠、快捷的处理方法是最优化方法(理论)的研究范畴。
目标函数、约束条件和求解方法是最优化问题的三个基本要素。
无约束条件的最优化问题称为理想最优化问题,所得结果称为理想最优解。
下面用三个简单的例子,说明最优化问题的目标函数和约束条件。
例1-1 有一块薄的塑料板,宽为a ,对称地把两边折起,做成槽(如图1-1)。
欲使槽的横截面积S 最大,1x 、2x 和θ的最优值是多少?该问题要找出最优参数1x 、2x 和θ,使槽的横截面积S 最大,所以,目标函数为θθsin )cos (max 221x x x S ⋅+=; (1-1)由于底边与两个斜边的总长度应等于塑料板宽度a ,即约束条件为a x x =+212。
(1-2)有许多最优化问题可以方便地将等式约束条件代入目标函数中,使原问题转换为无约束条件的最优化问题,便于求解。
例1-1为无约束条件的最优化问题时,目标函数如下θθsin )cos 2(max 222x x x a S ⋅+-=。
(1-3)例1-2 仓库里存有20米长的钢管,现场施工需要100根6米长和80根8米长的钢管,问最少需要领取多少根20米长的钢管?用一根20米长的钢管,截出8米管或6米长管的方法只有三种,设:1x —1根长管截 成2根8米管的根数;2x —1根长管截成1根8米管和2根6米管的根数;3x —1根长管 截成3根6米管的根数。
最优化方法与最优控制课程设计一、设计背景随着现代科技的迅猛发展和社会竞争的加剧,各领域都需要越来越高效、精确、优化的设计方法和控制策略。
其中,最优化方法和最优控制技术是目前工程和科学领域中广泛应用的重要工具。
为了培养具有创新、实际和实践能力的工科人才,本次课程设计旨在通过对最优化方法和最优控制的讲解和实践,让学生更好地掌握和应用相关知识和技能。
二、设计目标通过本次课程设计,学生将会达到以下目标:1.掌握最优化方法和最优控制技术的基本理论和基本方法。
2.学会使用常见的数学建模软件,如Matlab等进行系统建模和仿真分析。
3.能够独立和团队完成一个小型的最优化或最优控制项目,提高实践能力和工程实践能力。
三、设计内容本次课程设计包含以下主要内容:1. 最优化方法最优化问题是在已知约束和目标函数的情况下,寻找能够使目标函数达到最大值或最小值的决策变量。
本部分主要包括以下内容:1.1. 常见最优化方法:线性规划、非线性规划、整数规划等。
1.2. 最优化算法:梯度下降法、共轭梯度法、拟牛顿法、遗传算法等。
1.3. 最优化软件:Matlab、Gurobi、CPLEX等。
2. 最优控制方法最优控制是指将控制问题描述为寻求使性能指标最优的动态过程。
本部分主要包括以下内容:2.1. 常见最优控制方法:最优控制基本原理、极小值原理与动态规划、Pontryagin最小值原理、最优控制的数值方法等。
2.2. 最优控制软件:Matlab、Simulink、LabVIEW等。
3. 课程设计环节选做题目:利用所学知识设计一个最优化或最优控制的小型项目,完成以下步骤:3.1. 对所选项目进行问题陈述和问题定义,明确项目的目标和指标。
3.2. 采用合适的数学建模方法,将该项目建立为数学模型。
3.3. 选择相应的最优化或最优控制方法,探究寻找最优解的过程。
3.4. 采用合适的软件工具,在计算机上进行仿真分析和可视化呈现。
3.5. 编写实验报告,总结和分析实验结果,分享并展示项目成果。
自动控制系统的优化与最优控制自动控制系统在现代工业中起着至关重要的作用,它能够实现生产过程的自动化、提高生产效率,同时减少人工操作的干预。
为了更好地发挥自动控制系统的作用,优化和最优控制成为了控制系统设计与应用中的重要内容。
本文将对自动控制系统的优化与最优控制进行探讨。
一、自动控制系统的优化自动控制系统的优化是指通过对系统结构、参数以及控制算法进行调整和改进,使系统的性能指标达到最优,如稳定性、响应速度、鲁棒性等。
优化的过程一般包括以下几个步骤:1. 需求分析:明确系统的性能指标和优化目标,如响应时间的要求、稳定性要求等。
2. 建模与仿真:通过数学建模和仿真分析,获得系统的数学模型,并根据模型进行性能分析,以便确定系统的优化方向。
3. 参数调整与优化:根据系统的模型和性能分析结果,对系统的结构、参数以及控制算法进行调整和优化,以实现优化目标。
4. 仿真与验证:将优化后的系统模型进行仿真与验证,评估系统的性能指标是否达到了预期的要求。
二、最优控制理论与方法最优控制是指在满足系统约束条件的前提下,通过选择最优的控制策略,使得系统满足某个性能指标的最佳化问题。
最优控制方法一般包括动态规划、变分法、最优化方法等。
下面介绍两种常见的最优控制方法。
1. 动态规划:动态规划是一种通过将原始问题拆分为子问题,并存储子问题的最优值来求解整体最优解的方法。
在最优控制中,可以将系统的控制问题拆分为不同的阶段,并通过动态规划的方法来求解每个阶段的最优控制策略,从而得到整体的最优控制策略。
2. 变分法:变分法是一种通过构建能量函数或者性能指标的泛函形式,利用变分法求解泛函极值问题的方法。
在最优控制中,可以将系统的性能指标表示为一个泛函,并通过变分法的求解方法来求取使得泛函极小化的最优控制策略。
常见的变分法包括最小时间、最小能耗、最小误差等。
三、优化与最优控制在工业中的应用自动控制系统的优化与最优控制方法在工业中有广泛的应用。
第一章 最优化方法的一般概念人们在处理日常生活、生产过程、经营管理、社会发展等实际问题时,都希望获得最佳的处理结果。
在有多种方案及各种具体措施可供选择时,处理结果与所选取方案和具体措施密切相关。
获取最佳处理结果的问题称为最优化问题。
针对最优化问题,如何选取满足要求的方案和具体措施,使所得结果最佳的方法称为最优化方法。
1-1 目标函数、约束条件和求解方法目标函数就是用数学方法描述处理问题所能够达到结果的函数,该函数的自变量是表示可供选择的方案及具体措施的一些参数或函数,最佳结果表现为目标函数取极值。
在处理实际问题时,通常会受到经济效率、物理条件、政策界限等许多方面的限制,这些限制的数学描述称为最优化问题的约束条件。
求解方法是获得最佳结果的必要手段,该方法使目标函数取极值,所得结果称为最优解。
针对各种类型的最优化问题,找出可靠、快捷的处理方法是最优化方法(理论)的研究范畴。
目标函数、约束条件和求解方法是最优化问题的三个基本要素。
无约束条件的最优化问题称为理想最优化问题,所得结果称为理想最优解。
下面用三个简单的例子,说明最优化问题的目标函数和约束条件。
例1-1 有一块薄的塑料板,宽为a ,对称地把两边折起,做成槽(如图1-1)。
欲使槽的横截面积S 最大,1x 、2x 和θ的最优值是多少?该问题要找出最优参数1x 、2x 和θ,使槽的横截面积S 最大,所以,目标函数为θθsin )cos (max 221x x x S ⋅+=; (1-1)由于底边与两个斜边的总长度应等于塑料板宽度a ,即约束条件为a x x =+212。
(1-2)有许多最优化问题可以方便地将等式约束条件代入目标函数中,使原问题转换为无约束条件的最优化问题,便于求解。
例1-1为无约束条件的最优化问题时,目标函数如下θθsin )cos 2(max 222x x x a S ⋅+-=。
(1-3)例1-2 仓库里存有20米长的钢管,现场施工需要100根6米长和80根8米长的钢管,问最少需要领取多少根20米长的钢管?用一根20米长的钢管,截出8米管或6米长管的方法只有三种,设:1x —1根长管截 成2根8米管的根数;2x —1根长管截成1根8米管和2根6米管的根数;3x —1根长管 截成3根6米管的根数。
该问题的目标函数为321min x x x n ++=, (1-4)现场施工需要80根8米长和100根6米长的钢管,即约束条件为⎩⎨⎧≥+≥+,10032,8023221x x x x 3,2,10=≥i x i (1-5)a图1-1 横截面积与参数关系图例1-3 物体在液体中作直线运动时,它所受到的阻力与运动速度的平方成正比。
现假设该物体要在规定的时间],0[f t 内,从起点0)0(=x 到达终点S t x f =)(, 且终点速度不 受限制。
问该物体应采用什么运动方式)(t x ,它所消耗的能量最少?消耗的能量等于克服阻力所作的功,为运动速度的平方乘以一个比例常数,由于该常数在求极值过程中不起作用,则目标函数为⎰=ft t d t x J 02)(min , (1-6) 约束(边界)条件为0)0(=x ,S t x f =)(。
(1-7)上述3个简单的最优化问题中,例1-1和例1-2的目标函数的自变量都是参数,而例1-3的目标函数的自变量是表示物体运动方式的时间函数。
不同类型的最优化问题的合适求解方法是不相同的,有针对性的最优化方法将在后续章节分别讨论。
1-2 静态最优化问题与动态最优化问题静态,是指无时间变量的系统或处于平衡工作状态的动态系统,系统的数学模型是代数方程,而不是微分方程或差分方程。
静态最优化问题,就是选择系统的最优参数,使目标函数取极值。
对于动态系统而言,就是选择最优的平衡(工作)点参数。
例1-1和例1-2都是静态最优化问题的示例。
动态最优化问题的目标函数的自变量中含有动态系统的状态变量,状态变量一般是时间的函数。
动态最优化问题习惯上又称为最优控制问题,即选择系统最优的运动轨线,使目标函数取极值。
解动态最优化(求泛函的极值)问题通常采用变分法、最大(小)值原理和动态规划等方法。
例1-3是动态最优化问题的示例。
1-3 线性规划和非线性规划问题非线性规划和线性规划是静态最优化问题的两个分支,非线性规划问题的范围很宽,针对不同类型的最优化问题都有各自适用的求解方法。
静态最优化问题实质上是目标函数求极值的问题。
主要求解方法分别在第二章和第三章介绍。
线性规划问题:该类问题的目标函数和约束条件都是变量的线性函数。
例1-2就是一个线性规划问题的例子。
线性规划问题是最简单的最优化问题,同时也是很重要、具有普遍实用意义的最优化问题。
该类问题的求解方法相对简单,对于特殊类型的线性规划问题有更简便的求解方法。
非线性规划问题:该类问题的目标函数和约束条件中,含有变量的非线性函数。
例1-1就是一个非线性规划问题的例子。
非线性规划问题也是生产过程、经营管理、社会发展等实践中常常遇到的实际问题。
求解有约束的非线性规划问题,通常要将问题转化为无约束的非线性规划问题求解。
求解方法通常有两类:解析法和直接法。
1-4 最优化方法在控制领域中的应用最优化方法应用范围很广,在不同领域应用时,有不同的相应名称。
下面给出一些控制领域中的应用实例。
例1-4 参数估计 系统建模和自适应控制都是现代控制理论的重要分支,这两个分支都使用参数估计,即在已知系统结构条件下,经过对系统输入输出的观测,估计出系统参数的最优值,使数据拟合的残差平方和最小。
单输入单输出系统(式1-8)的参数估计问题数学描述如下:)()()(k k k y εθφ+=, (1-8) []T 111r m n c c b b a a --=θ, (1-9) [])()1()()1()()1()(r k k m k u k u n k y k y k ------=εεφ ,(1-10) 其中 )(k u 、)(k y 和)(k ε分别是系统输入、系统输出和拟合残差;θ是待估计的系统参数向量;)(k φ是观测数据向量。
式(1-8)是该问题的约束条件,目标函数为∑==N k k J 12)(21)ˆ(min εθ。
(1-11) 目标函数的自变量,即所要优化的变量是系统参数的估计值θˆ。
该问题使用的最优化方法称为增广最小二乘法(Extended Least Squares ),具体计算方法参见系统辩识的有关内容。
例1-5 最小方差控制 在随机控制理论中,使被控系统的输出方差最小的控制策略称为最小方差控制。
目标函数是:使系统输出方差最小;约束条件是系统的数学模型;目标函数的自变量是调节器的参数。
例如,线性时不变系统为)()1()()()1()(101m d k u b d k b d k u b n k y a k y a k y m n --++--+-=-++-+)()1()(1r k e c k e c k e r -++-++ , (1-12)式中 1≥d 是系统滞后的采样周期数, )(k e 表示白噪声,)()1()()(1r k e c k e c k e k w r -++-+= ,)(k w 是系统中的随机过程干扰。
为便于叙述,采用时间移动算子q ,则式(1-12)改写为)()()()()()(111k e q C k u q B q k y q A d ----+=。
(1-13)控制误差为 )(ˆ)(ˆ)()(d k y d k yd k y d k +-=+-+=+ε。
(1-14) 最小方差控制目标函数为 ∑==N k k J 12)(21)ˆ(minεθ。
(1-15) 最小方差控制规律为 )()()()()(111k y q G q B q F k u ----=; (1-16) 系统预报误差(控制误差)理论值和实际误差分别为)()()(1d k e q G d k y +=+-。
(1-17)式(1-14)中的多项式)(1-q F 和)(1-q G 是下列多项式方程的解)()()()(1111-----=+q C q F q q G q A d ,式中 )(1-q G 是1-d 次的首一多项式,)(1-q F 的次数满足多项式方程需要。
由多项式方程,可以得到多项式)(1-q F 和)(1-q G 的系数唯一解,即得到最小方差控制器的参数。
更多的应用例子将在后续章节里讨论。
习题一1.1 某工厂生产1a 、2a 和3a 三种紧俏产品。
每生产1万件1a 、2a 、3a 产品消耗原 料1b 、2b 、3b 如表1-1所示。
已知该厂现有原料1b 、2b 和3b 分别为100吨、200吨和500 吨。
每万件1a 、2a 和3a 产品分别可获利润4万元、3万元和2万元。
现有定货合同为1a 、 2a 和3a 产品分别为10万件、5万件和2万件。
如何安排生产才能获得最大利润?试给出 该问题的目标函数和约束条件(不必求解)。
1.2 某工厂生产A 、B 和C 三种产品,都需要经过机加工和组装车间。
产品加工、组装所需工时和车间每周生产能力如表1-2所示。
A 、B 和C 三种产品利润分别为150、100和80元/只。
问如何安排生产才能获得最大利润?试给出该问题的目标函数和约束条件(不必求解)。
表1-1 题1.1产品消耗原料表1.3 已知一线性时不变系统的运动方程、初始状态、允许采用的控制量及终端状态为 )()(t u t y= ;1)0(=y ,1)0(=y ;1)(1≤≤-t u ;0)()(==f f t y t y ; 要求选取最优控制策略,使得系统在最短时间内达到终端。
试给出该问题的目标函数和约束条件(不必求解)。
1.4已知一线性时不变系统的运动方程、初始状态及终端状态为)()(21t x t x= ,u t x =)(2 ;1)0()0(21==x x ,0)5()5(21==x x ; 要求选取最优控制策略,使得系统在指定的时间段]5,0[内达到终端,且消耗的控制能量最少。
试给出该问题的目标函数和约束条件(不必求解)。
1.5已知一线性时不变系统的运动方程、初始状态及控制作用为)()()(2)(t u t y t y t y=++ ζ;0)0()0(==y y ;)(1)(t t u =; 要求优化系统参数ζ,使系统状态偏差平方和最小。
试给出该问题的目标函数和约束条件(不必求解)。