船舶操纵性计算预报中的不确定度评定
- 格式:pdf
- 大小:357.23 KB
- 文档页数:9

船舶操纵性能预报及改善简介:船舶操纵性是指船舶按照设计者的意图保持或者改变其运动状态的性能,即船舶保持或改变其航速、航向和位置的性能。
船舶的操纵性包括:航向稳定性、回转性、转首性、跟从性和停船性能。
船舶操纵性预报的主要内容:船舶操纵运动的水动力预报,船舶回转运动时回转轨迹及主要特征参数的预报,Z形操舵试验中的Z形曲线的预报和停船性能有关参数的预报重要性:船舶操纵性是船舶航行的重要性能之一,和船舶的航行安全性密切相关现状:1.由于操纵性问题本身的复杂性和船东从营运效率考虑,对操纵性的关心远不如对快速性等性能的关心,因而操纵性没有得到应有的重视2.近十多年来,国内外造船界对船舶操纵性越来越重视,国际上船舶操纵性研究突飞猛进,取得了惊人的进展。
发展:1.国际海事组织(Intemational Maritime Organization,IMO)在船舶操纵性评估和制定船舶操纵性标准方面的工作引起了人们对船舶操纵性的重视2.船舶水动力学学科及其相关数值和实验技术的进步使研究船舶操纵性这种复杂的问题成为了可能操纵性能预报的方法:1、数据库方法----限制较大;使用方便2、自由自航船模试验方法----尺度效应;费用昂贵;3、利用船舶运动数学模型进行仿真计算方法----精度达工程计算要求;方便实用4、基于CFD技术的数值模拟方法----纯数值;可模拟波浪中操纵性5、神经网络方法(人工神经网络和BP神经网络)----非线性动态系统改善操纵性能的措施:1、舵的设计正确----合适的种类和外形尺寸2、船体主要尺度和型线的正确选择(船长,主尺度比,方形系数,纵中剖面面积,首尾部形状对水动力导数的影响)----协调航向稳定性和回转性之间的矛盾3、设计特种操纵装置----推进、操纵合一装置;主动式转向装置;特种舵数据库方法自由自航船模试验方法----尺度效应;费用昂贵;利用船舶运动数学模型进行仿真计算方法----精度达工程计算要求;方便实用基于CFD技术的数值模拟方法----纯数值;可模拟波浪中操纵性神经网络方法(人工神经网络和BP神经网络)----非线性动态系统。

舰船速度信息的不确定度评估1. 研究背景和意义1.1 舰船的速度信息对于海上安全及导航是至关重要的1.2 不确定度评估是保证舰船速度信息准确性的必要手段2. 相关研究及方法2.1 对于舰船速度信息的不确定度评估,已有大量相关研究 2.2 常用的方法包括船舶流程参数法、机械法及计算机模拟法等3. 船舶流程参数法3.1 基本原理及流程3.2 不确定度评估的实现方法3.3 优点和局限性4. 机械法4.1 基本原理及流程4.2 不确定度评估的实现方法4.3 优点和局限性5. 计算机模拟法5.1 基本原理及流程5.2 不确定度评估的实现方法5.3 优点和局限性6. 结论及展望6.1 不同方法的优缺点比较6.2 日后可行的研究方向及展望随着全球经济发展和海上贸易的增加,船舶作为一种重要的交通工具,其安全性和准确性的问题越来越受到人们的关注。
而船舶的速度信息则是确保其安全性和准确性的重要保障之一。
因此,对舰船速度信息的不确定度评估已成为保证其准确性的必要手段。
首先,舰船的速度信息与航行的安全息息相关。
航行过程中,舰船的速度信息直接决定了其在水中的行程和到达目的地的时间。
若速度信息错误或不准确,可能涉及到造成不必要的停留和误解航行方向,严重时可能会危及到船舶的安全和经济效益,造成严重的船舶事故。
其次,航行员需要时刻对船舶的速度信息进行监测和判断,在航行中通过不断的更正和调整,使得船舶始终保持在安全状态之中。
而无论是监测还是调整,都建立在舰船速度信息准确的基础之上。
而对于一些出现在船舶上但不可避免的错误源(例如船舶自身的姿态变化、船舶倾斜以及海浪的影响等),往往会导致船舶速度信息的不确定性。
因此,如何正确评估和处理舰船速度信息的不确定度,保证船舶的安全性和航行的准确性,成为了当前航行学和海事科学领域中亟待研究和解决的问题。
最后,随着技术的不断发展和信息化时代的到来,新技术和新方法的涌现也提供了更多可以用于舰船速度信息不确定度评估的工具。

单次船模阻力试验不确定度A类评定方法张立;陈伟民;胡健【期刊名称】《船海工程》【年(卷),期】2024(53)3【摘要】通过单次试验实现不确定度A类评定的方法能够节省时间和成本,梳理阻力试验的采样和分析方法,以及不确定度的A类评定方法,从单次试验的采样时间序列出发,采用一种时间序列截断(time series truncation,TST)方法,提取不同计数周期的连续的时间序列,以此生成一系列的观测样本,据此进行单次试验的均值输出和不确定度的A类评定,并与重复性试验结果对比。
结果表明,TST方法的不确定度A 类评定结果与重复性试验方法近似,满足工程应用要求;适用于任意单次试验;可在试验过程中实时分析。
通过应用TST方法,能够在单次阻力试验时,提升试验结果输出的稳定性。
【总页数】5页(P74-77)【作者】张立;陈伟民;胡健【作者单位】上海船舶运输科学研究所有限公司水路交通控制全国重点实验室;上海船舶运输科学研究所有限公司航运技术交通行业重点实验室;哈尔滨工程大学船舶工程学院【正文语种】中文【中图分类】U661.7【相关文献】1.测量不确定度基本原理和评定方法及在材料检测中的评定实例第七讲材料检测结果测量不确定度的评定实例(拉伸试验结果的测量不确定度评定)2.测量不确定度基本原理和评定方法及在材料检测中的评定实例第二讲测量不确定度的评定方法(A类标准不确定度的评定)3.测量不确定度基本原理和评定方法及在材料检测中的评定实例第三讲测量不确定度的评定方法(B类标准不确定度的评定)4.船模阻力试验不确定度评定改进技术研究5.JJF1059—1999《测量不确定度评定与表示》讨论之二十单次测量结果中是否就没有A类不确定度因版权原因,仅展示原文概要,查看原文内容请购买。
船模阻力试验的试验装置和数据测量方法及不确定度分析船模阻力试验需要在船舶拖曳试验池中完成,船舶拖曳试验池是水动力学实验的一种设备,是用船舶模型试验方法来了解船舶的运动、航速、推进功率及其他性能的试验水池,试验是由电动拖车牵引船模进行的。
船舶、潜艇、鱼雷、滑行艇、水翼艇,气垫船、冲翼艇、水上飞机和各种海洋结构物等都可在水池中作模型试验。
一、船模阻力试验池结构船模阻力试验池是进行船模阻力试验的设施,因而世界各国均普遍建造了各种船模试验池。
普通船模阻力试验池的主要任务是进行船舶模型的拖曳、阻力性能试验、螺旋桨性能、自航及耐波性等试验。
试验池狭而长,配置有拖动设备和测量仪器,以测得船模在不同速度下的阻力值。
为避免海水的腐蚀作用,试验池的水都采用淡水。
船模阻力试验池按拖曳船模的方式可分为拖车式和重力式两种。
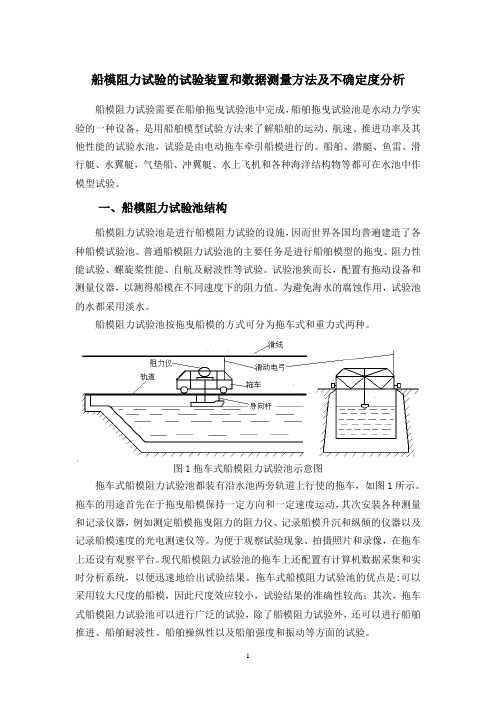
图1拖车式船模阻力试验池示意图拖车式船模阻力试验池都装有沿水池两旁轨道上行使的拖车,如图1所示。
拖车的用途首先在于拖曳船模保持一定方向和一定速度运动,其次安装各种测量和记录仪器,例如测定船模拖曳阻力的阻力仪、记录船模升沉和纵倾的仪器以及记录船模速度的光电测速仪等。
为便于观察试验现象、拍摄照片和录像,在拖车上还设有观察平台。
现代船模阻力试验池的拖车上还配置有计算机数据采集和实时分析系统,以便迅速地给出试验结果。
拖车式船模阻力试验池的优点是:可以采用较大尺度的船模,因此尺度效应较小,试验结果的准确性较高;其次,拖车式船模阻力试验池可以进行广泛的试验,除了船模阻力试验外,还可以进行船舶推进、船舶耐波性、船舶操纵性以及船舶强度和振动等方面的试验。
图2重力式船模实验池示意图重力式船模阻力试验池如图2所示,是早期用于进行小船模阻力试验的简陋设施。
试验时靠重量的下落来拖动船模,当船模达到等速前进时,砝码的重量就等于船模的阻力,记录船模被等速拖动一定距离所需的时间,可得到相应的船模速度。
因此重力式船模阻力试验是在给定阻力情况下,测定相应的船模速度。

多用途货船的操纵性预报计算多用途货船是一种具有多种装载能力和灵活性的船舶,广泛应用于全球贸易和物流运输中。
在多用途货船的设计和运营过程中,操纵性预报计算显得尤为重要。
本文将探讨多用途货船的操纵性预报计算方法,以期为相关领域的研究和实践提供有益的参考。
随着全球贸易和物流业的快速发展,多用途货船在运输行业中的地位日益提升。
为了提高运输效率和降低成本,许多航运公司开始投入更多资源进行多用途货船的研发和升级。
在此背景下,对多用途货船操纵性预报计算的研究也成为了一个关键的课题。
多用途货船的操纵性预报计算主要包括以下几个步骤:船舶操纵性因素分析:首先需要确定影响船舶操纵性的因素,如船舶尺寸、船速、航向等。
通过对这些因素的分析,可以初步了解船舶的操纵性能。
船舶运动方程组的建立:结合船舶操纵性因素,建立船舶运动方程组。
该方程组可以描述船舶在各种环境条件下的运动行为,为后续的预报计算提供基础。
数字滤波算法:由于船舶在实际运营中会受到各种扰动因素的影响,因此需要对船舶运动方程组进行滤波处理,以减小扰动对预报结果的影响。
数字滤波算法可以采用卡尔曼滤波或其他的数值滤波方法。
为了验证上述计算方法的性能和准确性,我们进行了一系列实验。
实验中采用了实际航行数据和模拟数据进行对比分析。
结果表明,该计算方法能够较为准确地预报多用途货船的操纵性能,并且对不同航道和环境条件具有较好的适应性。
本文探讨了多用途货船的操纵性预报计算方法,通过对其计算过程和实验结果的分析,可以得出以下多用途货船的操纵性预报计算对于提高船舶运输效率和降低运营成本具有重要意义。
通过分析船舶操纵性因素、建立船舶运动方程组以及采用数字滤波算法,可以较为准确地预报多用途货船的操纵性能。
实验结果表明,该计算方法在实际航行和模拟环境中均具有较好的适应性和准确性,可以为多用途货船的操纵性能评估和航行安全提供有效的支持。
展望未来,多用途货船的操纵性预报计算研究仍有广阔的发展空间。

大舵角下船舶操纵性指数K,T简易计算方法研究
张彬;李国定;李丽娜;蒋娇
【期刊名称】《武汉理工大学学报(交通科学与工程版)》
【年(卷),期】2015(039)001
【摘要】根据船舶转向到新航向距离Dnc的计算公式,运用数学方法推导出操纵性指数K,T值的简易计算方法.并与现有其他方法进行对比,将该方法与Z形试验法计算的K,T值代入船舶一阶线性响应模型进行仿真验证,然后与基于船舶智能操控仿真平台的旋回试验数据进行对比,得出在操舵角大于等于20°时,简易计算方法比Z 形试验法计算精度更高.因此,提出的简易计算方法对计算大舵角时的船舶操纵性指数K,T值具有可操作性和实用性.
【总页数】5页(P153-156,161)
【作者】张彬;李国定;李丽娜;蒋娇
【作者单位】集美大学航海学院厦门 361021;集美大学航海学院厦门 361021;集美大学航海学院厦门 361021;集美大学航海学院厦门 361021
【正文语种】中文
【中图分类】U661.33
【相关文献】
1.双桨双舵船舶操纵性预报研究 [J], 王化明;邹早建
2.船舶操纵性指数计算方法的研究 [J], 刘明俊;高国章
3.舵布置位置对船舶操纵性影响试验研究 [J], 曹留帅;朱军;葛义军
4.不同舵角下前置预旋导轮对桨舵影响的\r模型试验研究 [J], 陈雷强;严周广;石雯;张宁;吴赞;李鹏程
5.基于MATLAB GUI的船舶操纵性指数计算 [J], 解国强
因版权原因,仅展示原文概要,查看原文内容请购买。
是对船舶操纵性的评估与衡准工作,这些工作直接推动了船舶操纵性预报研究。
3船舶操纵性预报研究进展根据IM0的要求;为了提高航行安全性,避免设计、建造不满足操纵性基本要求的船舶,应该在船舶初始设计阶段就对船舶操纵性作出预报。
为此,各国船舶科技工作者和船舶设计人员开展了大量的理论、数值和试验研究工作,大大提高了船舶操纵性预报研究的水平[31141。
3.1操纵性预报方法在船舶初始设计阶段预报船舶操纵性,通常采用的方法有,自由自航模试验方法、计算机数值模拟方法及半理论半经验的估算方法。
其中,自由自航模试验方法是用和所设计的实船几何相似的船模在水池或天然湖泊中进行Z型试验、回转试验等标准操纵试验,得到表示操纵性的特征值,由此对实船操纵性作出预报:自由自航模试验方法是一种公认为比较可靠的方法,但由于船模和实船的雷诺数不相等,存在所谓的“尺度效应”影响,因而预报准确性存在问题。
计算机数值模拟方法是以计算机为工具,通过数值求解船舶操纵运动方程(又称为数学模型),模拟标准操纵试验,从而实现对实船操纵性的理论预报:计算机数值模拟方法需要事先选定数学模型,并确定其中的水动力系数,因而该方法的预报精度直接取决于求得的水动力系数的精度:随着计算机科学技术的发展和能较精确预报水动力系数的各种计算方法的开发,数值模拟方法在船舶操纵性预报中得到了越来越广泛地采用。
半理论半经验的估算方法是基于现有的大量船模和实船操纵性数据建立数据库、专家系统,或得出回归公式,对操纵性特征值进行估算,由此方便、快捷地对所设计船舶的操纵性作出预报:由于其实用性好,近十年来半理论半经验的估算方法得到了相当广泛的开发、应用;但该方法的预报精度受到现有数据的限制,当所设计的船舶不在现有数据所涉及的船型之内时,其预报精度难于保证。
3.2水动力预报确定船舶操纵运动方程中的水动力系数是采用计算机数值模拟方法预报船舶操纵性的前提。
确定水动力系数的方法主要有三种,即,约束船舶试验方法、数值计算方法和半理论半经验的估算方法。
船舶操纵性试验规范1 范围本规范规定了用差分全球卫星定位系统(DGPS)接收机测试船舶操纵性的方法。
本规范适用于海船实船操纵性试验,水面舰艇可参照执行。
2 试验目的测定船舶操纵性能,绘制船舶驾驶室挂图,检验船舶操纵性能是否满足IMO 相关要求。
3 试验仪器、设备3.1 DGPS 测试系统包括DGPS 接收机、计算机、打印机。
3.2 DGPS 接收机DGPS 接收机应符合GB/T 15527的规定,且在差分信号作用200 n mile 内,定位误差应不大于 5 m(置信度95%,水平精度因子值不大于4)。
如果为双天线DGPS 接收机,定向误差不大于。
接收机应在标定的有效期内使用。
D 13.3 坐标和时间3.3.1 DGPS 测量采用WGS-84大地坐标系。
3.3.2 DGPS 测量采用协调世界时(UTC)记录。
每秒钟采集一组数据。
3.4 应用软件数据处理软件,包括采样软件和数据计算分析软件,应经检验合格认可后方可使用。
4 试验条件4.1 试验海区试验海区应开阔,有足够回旋余地。
水深不应小于船舶吃水的5倍。
4.2 试验海况风力不应大于蒲氏3级,海浪不应超过2级,潮流平稳。
4.3 船舶状态液货船一般为装载状态,其他船舶可为压载状态。
5 试验项目操纵性试验一般包括回转试验、紧急停船和惯性停船试验、Z 形操纵试验、威廉逊(Williamson)救生试验和航向稳定性试验等。
6 试验程序和方法6.1 试验前的准备 6.1.1 天线安装6.1.1.1 天线安装位置应尽量远离无线电干扰。
天线仰角以上的空间对卫星的视野应清晰,天线接地线应与船的接地系统连接。
D 56.1.1.2 天线位置尽可能安装在船舶重心垂直上方,否则应对测试结果进行位置修正。
如果为双天线,则两个天线中心位置的连线应与船舶中纵剖面线方向一致。
6.1.2 卫星信号和差分信号接收6.1.2.1 应能接收到4颗以上有足够强度的卫星信号。
6.1.2.2 应选择差分信号最强的差分台,保证差分信号良好。
船舶操纵性试验方法
李杨
【期刊名称】《武汉造船》
【年(卷),期】1994(000)002
【摘要】船舶操纵性试验方法李杨(长航武汉船舶质量检测站)船舶操纵性是在“船舶原理”各学科中新近发展起来的、并且还很不完善的一门学科。
对于操纵性,可简单地理解为船舶按照驾驶者的意图去保持或改变船舶运动状态的性能。
就我国内河水运航道目前的状况和船舶驾驶者的实用角...
【总页数】4页(P44-47)
【作者】李杨
【作者单位】无
【正文语种】中文
【中图分类】U661.33
【相关文献】
1.船舶操纵性自航模试验不确定度分析 [J], 师超;韩阳
2.船舶操纵性数值的预报粘性流研究 [J], 陶峰
3.考虑船舶操纵性约束的改进遗传算法航线规划 [J], 王立鹏;张智;马山;王学武
4.固定吊舱式混合对转桨推进系统对船舶操纵性能的影响分析 [J], 林福泉
5.基于MATLAB GUI的船舶操纵性指数计算 [J], 解国强
因版权原因,仅展示原文概要,查看原文内容请购买。
1007-7294 (2011 ) 08-0853-08
船舶操纵性计算预报中的不确定度评定
马向能冯骏
中国船舶科学研究中心,江苏无锡214082
摘要:不确定度分析是以定量的形式给出数据结果的品质和可信度,是数据分析中必要的一个组成部分。
为了适应国际海事组织(IMO)正式通过的MSC.137(76)船舶操纵性标准(IMO,2002b)决议,就要求在船舶设计阶段通过数值计算方法预报的操纵性能更加精确。
因此,文章依照GUM不确定度评定方法,基于船舶操纵性预报“整体型”数学模型,结合操纵性水动力试验结果及其导数分析,对船舶操纵性预报结果进行了不确定度评定。
测量不确定度;操纵性;置信概率;水动力;GUM
U661.33A
Uncertainty analysis in prediction of ship manoeuvring abilities
MA Xiang-neng FENG Jun
2011-03-27
马向能(1972-),男,中国船舶科学研究中心高级工程师。
万方数据
(3)万方数据
(9)万方数据
(10)万方数据
(18)万方数据
万方数据
(25)万方数据
@@[1] IMO Resolution MSC. 137(76), 2002b. Standards for ship manoeuvrability[S]. London, 2002.
@@[2] ITTC23nd. Quality Manual[K]. 2002.
@@[3] ITTC24nd. Quality Manual[K]. 2005.
@@[4] Bulian. Guide to the Expression of Uncertainty in Measurement (GUM), BIPM, IEC, IFCC, ISO, IUPAC, IUPAP, OIML [M]. 1st edition. 1995.
@@[5] JF1059-1999,测量不确定度评定与表示[M].北京:中国计量出版社,1999.
@@[6] Bulian G, Nicolosi R G, Francescutto A. On tJe effect of uncertainty modeling in the hydrodynamic derivatives of a ship manoeuvring mathematical model[J]. International Shipbuilding Progess, 1999, 30(359): 359-368.@@[7]吴秀恒.船舶操纵性与耐波性[M].北京:人民交通出版社,1999.
@@[8]马向能.测量不确定度分析在操纵性试验中的应用[R].无锡:中国船舶科学研究中心科技报告,2004.
@@[9]刘智敏,不确定度及其实践[M].北京:中国标准出版社,2000.
万方数据
船舶操纵性计算预报中的不确定度评定
作者:马向能, 冯骏, MA Xiang-neng, FENG Jun
作者单位:中国船舶科学研究中心,江苏无锡,214082
刊名:
船舶力学
英文刊名:Journal of Ship Mechanics
年,卷(期):2011,15(8)
本文链接:/Periodical_cblx201108004.aspx。