第三章伺服系统传递函数的建立
- 格式:ppt
- 大小:1.66 MB
- 文档页数:42

伺服阀传递函数1伺服阀的介绍伺服阀是一种用于流体控制的设备,可以通过根据输入信号控制输出属性来实现精确的流量或压力控制。
伺服阀通常带有内置或外置的传感器,可以检测输出信号并自动调整其工作状态以达到所需的控制效果。
由于其高精度、高可靠性和良好的自适应性能,伺服阀在工业自动化、航空航天、卫星导航、汽车制造等领域都得到了广泛应用。
2伺服阀的传递函数在控制系统中,传递函数可以用来描述输入信号和输出信号之间的关系。
在伺服阀中,传递函数也有着重要的作用。
伺服阀的传递函数可以描述输入信号(比如电流信号)和输出信号(比如阀芯的开度或流量)之间的关系。
对于伺服阀的控制和优化,传递函数也是必不可少的工具。
伺服阀的传递函数通常可以表示为以下形式:G(s)=K/(1+Ts)其中G(s)是伺服阀的传递函数,s是复频域变量,K和T分别是控制器的增益和时间常数。
这里的时间常数T通常指的是阀芯的动态响应时间,即从输入信号变化到阀芯完全打开或关闭所需的时间。
在传递函数的分母中,1+Ts表示伺服阀的惯性滞后因素,它可以反映伺服阀的惯性和滞后特性。
3伺服阀的开环传递函数和闭环传递函数伺服阀的传递函数可以分为开环传递函数和闭环传递函数。
开环传递函数是指在没有反馈的情况下,输入信号与输出信号之间的传递函数。
开环传递函数通常比较简单,但是由于没有反馈调节,容易受到干扰和变化的影响,对伺服阀的控制精度和稳定性有一定的限制。
闭环传递函数是指在有反馈调节的情况下,输入信号与输出信号之间的传递函数。
闭环传递函数通常比开环传递函数更加复杂,但是可以通过反馈调节来提高控制精度和稳定性,对伺服阀的控制效果更好。
4伺服阀传递函数的应用伺服阀的传递函数可以用来设计、分析和优化伺服系统。
在伺服系统的设计过程中,传递函数可以作为控制器的设计依据,可以根据系统的要求和传递函数的特性,选择合适的控制器类型和参数。
在系统的分析和优化过程中,传递函数可以用来评估系统的性能和稳定性,可以通过对传递函数的分析来优化系统的结构和参数。

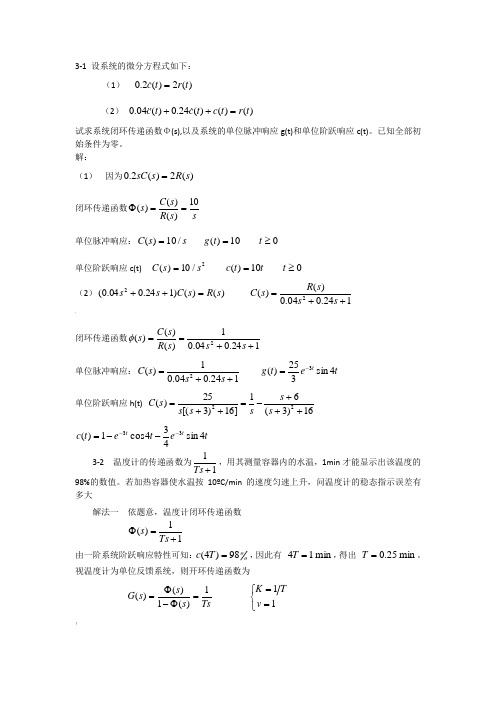
3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C `闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s C t e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK !用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T sTs Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 203-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。



伺服阀传递函数伺服阀是一种常用的流量控制装置,广泛应用于工业自动化领域。
伺服阀的传递函数描述了其输入和输出之间的关系,是研究和设计伺服阀系统的重要工具。
本文将详细介绍伺服阀传递函数的概念、特性和应用。
一、传递函数的定义和表示伺服阀传递函数是描述伺服阀系统输入和输出之间关系的数学模型。
传递函数通常用一个分子多项式除以一个分母多项式的比值来表示。
例如:G(s) = Y(s)/X(s)其中,G(s)是传递函数,Y(s)是系统的输出,X(s)是系统的输入,s 是拉普拉斯变量。
传递函数可以是一个标量,也可以是一个向量,具体取决于系统的维度。
二、传递函数的特性1. 零点和极点:传递函数中的分子多项式和分母多项式的根分别被称为零点和极点。
它们决定了传递函数的稳定性和响应特性。
2. 频率响应:传递函数可以通过频率响应来描述系统对不同频率输入的响应程度。
频率响应可以用幅频特性和相频特性来表示。
3. 稳定性:传递函数的极点决定了系统的稳定性。
当所有极点的实部小于零时,系统是稳定的。
4. 阶数:传递函数的阶数等于分子多项式和分母多项式的最高次幂的差。
阶数越高,系统的复杂性越大。
三、传递函数的应用1. 控制系统设计:传递函数可以帮助工程师设计和调整控制系统,使系统的响应满足要求。
通过调整传递函数的零点和极点,可以改变系统的稳定性和响应速度。
2. 系统分析:传递函数可以用来分析系统的稳定性、频率响应和阶跃响应等特性。
通过对传递函数进行数学推导和仿真分析,可以预测系统的性能和行为。
3. 滤波器设计:传递函数可以用来设计和分析滤波器,实现信号的滤波和频率选择。
4. 传感器校准:传递函数可以用来校准传感器,将传感器的输出与实际物理量之间建立准确的关系。
四、总结伺服阀传递函数是描述伺服阀系统输入和输出之间关系的重要数学模型。
它的特性和应用广泛,可以用于控制系统设计、系统分析、滤波器设计和传感器校准等领域。
通过深入理解和应用传递函数,可以提高工程师对伺服阀系统的认识和掌握,从而实现更好的控制和优化。