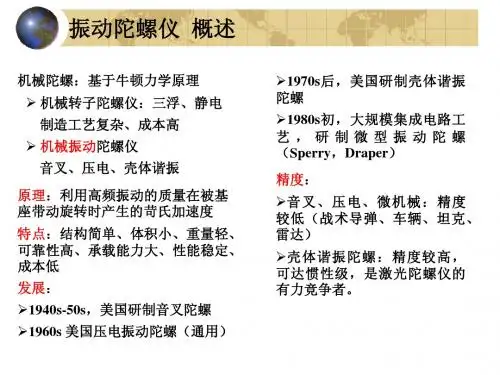
第2章-旋转质量陀螺仪及其力学分析
- 格式:ppt
- 大小:1.58 MB
- 文档页数:68


第二节 陀螺罗经概述1.发展法国物理学家列昂.福科(Leon Foucault) 1852年提出的陀螺指向理论;现代船舶上普遍使用的陀螺罗经于本世纪初研制成功的船舶指向仪器。
1908年德国生产出了安许茨型陀螺罗经(ANSCHÜTZ gyrocompass);1911年美国生产出了斯伯利型陀螺罗经(SPERRY gyrocompass);1916年英国生产出了勃朗型陀螺罗经(BROWN gyrocompass)。
2.分类近百年,生产出了近百种型号的陀螺罗经,主要分为三大系列或两大类型。
按照结构特点和工作原理分为三大系列:即安许茨系列;斯伯利系列;阿玛-勃朗系列。
按照灵敏部分转子个数分为两大类型:即单转子陀螺罗经和双转子陀螺罗经。
按照控制力矩的性质分为两大类型:机械摆式陀螺罗经和电磁控制式陀螺罗经。
按照阻尼方式分两大类型:水平轴阻尼陀螺罗经和垂直轴阻尼陀螺罗经。
3.与磁罗经相比较,陀螺罗经的主要优缺点主要优点:指向精度高;多个复示器,有利于船舶自动化;不受磁干扰影响,指向误差小;安装位置不受限制等。
主要缺点:必须有电源才能工作(可靠性较差);工作原理、结构复杂。
4.发展趋势体积小型化;广泛采用先进技术;提高指向可靠性和使用寿命;简化维护保养。
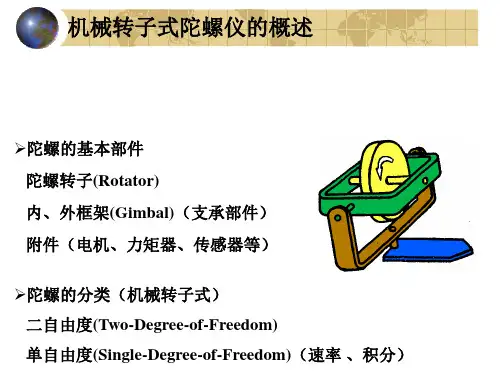
一、陀螺罗经指北原理1.自由陀螺仪及其特性1)自由陀螺仪(free gyroscope)定义陀螺仪从广义讲就是一种能绕定点高速旋转的对称刚体。
实用陀螺仪是高速旋转的对称刚体及其悬挂装置的总称。
按其悬挂装置不同分为单自由度陀螺仪(single-degree of freedom gyro.)、二自由度陀螺仪(two-degree of freedom gyro.)和三自由度陀螺仪(three-degree of freedom gyro.)。
平衡陀螺仪(balanced gyroscope):若陀螺仪的重心(G)与中心(O)重合。
自由陀螺仪:重心(G)与中心(O)重合,不受任何外力矩作用的三自由度平衡陀螺仪。
陀螺仪实验陀螺仪是一种具有比较复杂的运动学和动力学现象的装置,它有一个高速旋转的定点运动转子,该转子的轴线具有定向性,这是陀螺的最大特点。
陀螺的定向性在工程中有重要用途,如舰船和导弹的导航、稳定船舶和车辆的姿态,实际上行驶的自行车能够不翻倒也是由于陀螺的定向性,这时自行车的两个轮子就是陀螺。
因此,陀螺仪实验对于学生巩固和提高所学运动学、动力学知识,对复杂运动规律的认知和分析计算都有重要作用。
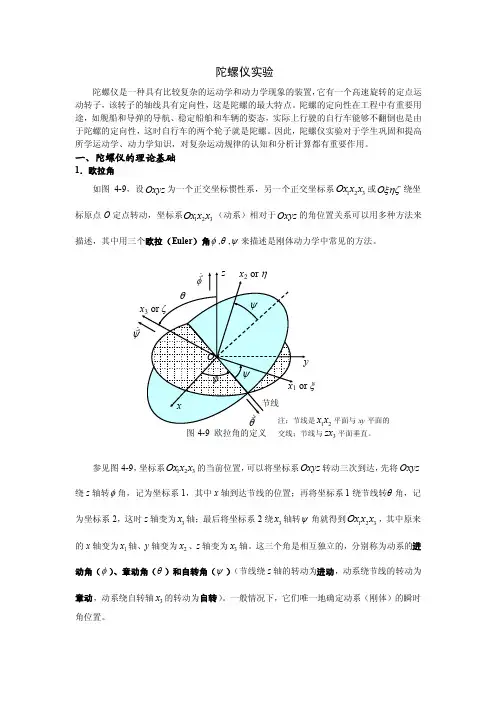
一、陀螺仪的理论基础1.欧拉角如图4-9,设Oxyz 为一个正交坐标惯性系,另一个正交坐标系321x x Ox 或O ξηζ绕坐标原点O 定点转动,坐标系321x x Ox (动系)相对于Oxyz 的角位置关系可以用多种方法来描述,其中用三个欧拉(Euler )角φ,θ,ψ来描述是刚体动力学中常见的方法。
参见图4-9,坐标系321x x Ox 的当前位置,可以将坐标系Oxyz 转动三次到达,先将Oxyz 绕z 轴转φ角,记为坐标系1,其中x 轴到达节线的位置;再将坐标系1绕节线转θ角,记为坐标系2,这时z 轴变为3x 轴;最后将坐标系2绕3x 轴转ψ角就得到321x x Ox ,其中原来的x 轴变为1x 轴、y 轴变为2x 、z 轴变为3x 轴。
这三个角是相互独立的,分别称为动系的进动角(φ)、章动角(θ)和自转角(ψ)(节线绕z 轴的转动为进动,动系绕节线的转动为章动,动系绕自转轴3x 的转动为自转)。
一般情况下,它们唯一地确定动系(刚体)的瞬时角位置。
再来确定动系321x x Ox 的角速度矢量Ω。
在~t t t +∆的t ∆时间内,设动系角位置的无穷小增量为φ∆、θ∆和ψ∆,动系的这种无穷小角位置改变可以将动系分别绕z 轴转φ∆、绕节线转θ∆和绕3x 轴转ψ∆后叠加得到,且结果与转动次序无关(我们对此不作证明,但必须注意,刚体多次有限转动的结果却与转动次序有关,因此不能叠加;学生可以将一本书沿任意两条边以一种次序各转90︒,再重新按不同的次序各转90︒,结果是不同的)。

陀螺仪测量角速度的原理陀螺仪是一种用于测量物体角速度的仪器,其原理基于角动量守恒定律和角速度与陀螺仪的力矩之间的关系。
本文将详细介绍陀螺仪测量角速度的原理。
一、角动量守恒定律角动量守恒定律是力学中的基本定律之一,它表明在没有外力作用的情况下,一个物体的角动量保持不变。
角动量的大小与物体的质量、速度和旋转惯量有关。
二、陀螺仪的结构与工作原理陀螺仪通常由旋转的转子、支撑结构和传感器组成。
转子在陀螺仪内以高速旋转,具有较大的旋转惯量。
传感器可以感知转子的旋转状态,并将其转化为电信号输出。
当陀螺仪静止时,转子的角动量为零。
当陀螺仪受到外部扰动或物体发生旋转时,转子的角动量开始发生变化。
根据角动量守恒定律,转子的角动量变化量需要通过陀螺仪的支撑结构传递给整个陀螺仪系统。
三、陀螺仪的力矩与角速度关系陀螺仪的力矩与转子的角速度之间存在着一定的关系。
当陀螺仪受到外部扰动或物体发生旋转时,由于角动量守恒定律的存在,陀螺仪会产生一个力矩,使得转子的角速度发生变化。
根据力矩的定义,力矩等于力乘以力臂的长度。
在陀螺仪中,力臂可以看作是陀螺仪的支撑结构。
当陀螺仪发生旋转时,由于转子的旋转惯量较大,转子的角速度变化较小,因此力矩较小。
而当陀螺仪受到较大的外力扰动时,转子的角速度变化较大,力矩也较大。
陀螺仪通过测量转子所受到的力矩,间接测量物体的角速度。
当物体发生旋转时,陀螺仪的转子会受到一个力矩,使得转子的角速度发生变化。
传感器可以感知转子的角速度变化,并将其转化为电信号输出。
通过对陀螺仪输出信号的处理,可以获取到物体的角速度。
一般来说,陀螺仪的输出信号是一个连续变化的模拟信号,需要经过模数转换后转化为数字信号。
然后,通过对数字信号进行滤波和处理,可以得到物体的角速度信息。
陀螺仪测量角速度的原理可以应用于许多领域,例如导航系统、飞行器控制系统、姿态稳定系统等。
通过测量物体的角速度,可以实现对物体运动状态的准确监测和控制。
陀螺仪通过测量转子受到的力矩来间接测量物体的角速度。
一、引言iPhone有一个独特的功能:当你旋转手机时,屏幕显示也会随之旋转,无论你把它颠过来还是倒过去,都可以看到正确的显示。
这种神奇功能的实现,得益于陀螺仪。
本文简要回顾陀螺仪的发展史,着重介绍光纤陀螺仪的工作原理和发展现状,并分析陀螺仪的发展前景。
二、陀螺仪的分类从陀螺仪的构成划分,可以将陀螺仪分为刚体转子陀螺仪和光学陀螺仪。
1.刚体转子陀螺仪。
传统的陀螺是指绕一个支点高速转动的刚体。
通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。
在一定的初始条件和一定的外力矩在作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的进动(precession),又称为回转效应(gyroscopiceffect)。
人们利用陀螺的力学性质所制成的各种功能的陀螺装置称为陀螺仪(gyroscope)。
陀螺仪能够精确地确定运动物体方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器。
1852年法国科学家J.B.L.傅科制作了一套能显示地球转动的仪器,命名为陀螺仪。
1914年开始将陀螺仪作为惯性基准构成飞机的电动陀螺稳定装置。
从20年代起,陀螺仪广泛应用于各种运载体(如船舶、飞机等)上,成为各种运载体的自动控制、制导和导航系统中测定姿态、角速度、角加速度、方位的重要元件。
40年代,陀螺仪开始在早期导弹上作为制导系统的姿态基准。
但是直至50年代,陀螺仪在构造原理上改进不大,大体上仍沿袭傅科所制作的陀螺仪,测量精度不高。
上世纪50年代以后,陆续出现了陀螺仪转子的液浮、磁浮、动压气浮、静电悬浮以及挠性支承技术,使陀螺仪的构造得到很大改善,测量精度大大提高。
1975年激光陀螺仪研制成功,它不存在机械摩擦不受重力加速度的影响,承受振动的能力强,在飞机和导弹的惯性导航系统中得到广泛应用。
1976年提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。
university of science and technology of china 96 jinzhai road, hefei anhui 230026,the people’s republic of china陀螺仪实验实验报告李方勇 pb05210284 sist-05010 周五下午第29组2号2006.10.22 实验题目陀螺仪实验(演示实验)实验目的1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系。
实验仪器①三轴回转仪;②计数光电门;③光电门用直流稳压电源(5伏);④陀螺仪平衡物;⑤数字秒表(1/100秒);⑥底座(2个);⑦支杆(2个);⑧砝码50克+10克(4个);⑨卷尺或直尺。
实验原理1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度?为:?=d?r/dt=m/ip (1) 式中?r为陀螺仪盘的角速度,ip为陀螺仪盘的转动惯量。
m=f.r为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:f=m(g-a) (2) 式中g为重力加速度,a为轨道加速度(或线加速度)轨道加速度与角加速度的关系为:a=2h/tf2; ?=a/r (3) 式中h为砝码下降的高度,r如图1所示为转轴的半径,tf为下落的时间。
将(2)(3)代入(1)2ip?2mr2t?h2mgr可得: (4)2f测量多组tf和h的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物w使陀螺仪ab轴(x轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕x轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量l:l=ip.?r (5) 当在陀螺仪的另一端挂上砝码m(50g)时就会产生一个附加的力矩m*,这将使原来的角动量发生改变:dl/dt=m*=m*gr* (6) 由于附加的力矩m*的方向垂直于原来的角动量的方向,将使角动量l变化dl,由图1可见: dl=ld?这时陀螺仪不会倾倒,在附加的力矩m*的作用下将会发生进动。
陀螺仪陀螺仪的原理与发展⼀、引⾔陀螺仪是⼀种利⽤是⽤⾼速回转体的动量矩敏感壳体相对惯性空间绕正交于⾃转轴的⼀个或⼆个轴的⾓运动检测装置,在姿态控制和导航定位等领域有着⾮常重要的作⽤。
⼆、原理绕⼀个⽀点⾼速转动的刚体称为陀螺,通常它是⼀个质量均匀分布的、具有轴对称形状的刚体,其⼏何对称轴就是它的⾃转轴。
在⼀定的初始条件和⼀定的外在⼒矩作⽤下,陀螺会在不停⾃转的同时,环绕着另⼀个固定的转轴不停地旋转,这就是陀螺的旋进,⼜称为回转效应。
通常陀螺仪的基本组成包括:陀螺转⼦,内、外框架,附件等部件。
(如图⼀所⽰)图⼀图⼆三、特性陀螺仪在航空、航天、航海等领域的⼤规模应⽤,是由于它的两个基本特性:⼀为定轴性,另⼀是进动性。
定轴性是指:当陀螺仪⾼速旋转时,如果没有外⼒矩作⽤到陀螺仪上时,陀螺仪的⾃转轴在惯性空间中的指向保持稳定不变,同时当有外⼒矩⼲扰时反抗任何改变转⼦轴向的⼒矩。
并且转⼦的转动惯量越⼤,转⼦的⾓速度越⼤,陀螺仪的稳定性越好。
进动性是指:当转⼦⾼速旋转时,若外⼒矩作⽤于外环轴,陀螺仪将绕内环轴转动;若外⼒矩作⽤于内环轴,陀螺仪将绕外环轴转动。
其转动⾓速度⽅向与外⼒矩作⽤⽅向互相垂直。
进动⾓速度的⽅向可⽤右⼿定则判断(如图⼆所⽰)即伸直右⼿,⼤拇指与⾷指垂直,⼿指顺着⾃转轴的⽅向,⼿掌朝外⼒矩的正⽅向,然后⼿掌与4指弯曲握拳,则⼤拇指的⽅向就是进动⾓速度的⽅向。
进动⾓速度的⼤⼩取决于转⼦动量矩H的⼤⼩和外⼒矩M的⼤⼩,其计算式为进动⾓速度ω=M/H。
(ω为进动⾓速度,M为外⼒矩,H为动量矩)四、陀螺仪的发展陀螺仪由1850年法国物理学家莱昂·傅科在研究地球⾃传中获得灵感⽽发明出来的,类似像是把⼀个⾼速旋转的陀螺放到⼀个万向⽀架上,靠陀螺的⽅向来计算⾓速度。
陀螺仪发明后,⾸先应⽤到航海上,后来在航空、航天等领域迎来了⼤规模应⽤,成为了最重要的仪表之⼀。
到第⼆次世界⼤战,德国⼈为了使飞弹能准确的落到⽬标上空,德国⼈研发了惯性制导系统。
陀螺力学原理的应用论文引言陀螺力学原理是指通过陀螺仪的旋转运动来实现稳定性和导航的原理。
在现代科技领域,陀螺力学原理被广泛应用于航空航天、导航系统、惯性导航以及稳定平台等领域。
本文将介绍陀螺力学原理的基本原理、应用以及未来的发展趋势。
陀螺力学原理的基本原理1.自转角速度作用:陀螺仪的内部实现原理依靠陀螺仪自身的自转角速度。
当陀螺仪受到外界扰动时,陀螺仪通过自转角速度来抵消这些扰动,从而保持稳定。
2.比例导航原理:陀螺力学原理的另一个重要原理是比例导航原理。
通过测量陀螺仪的旋转角速度,可以将其与目标角速度进行比较,从而实现导航。
3.稳定平台原理:稳定平台是一种基于陀螺力学原理的重要应用。
通过在平台上安置陀螺仪,可以实现航空航天器、导弹以及船舶等运载工具的姿态稳定,提高其稳定性和控制性能。
陀螺力学原理在导航系统中的应用1.惯性导航系统:陀螺力学原理被广泛应用于惯性导航系统中。
惯性导航系统通过测量陀螺仪的旋转角度来确定运动物体的方向和位置,从而实现导航。
惯性导航系统在航空航天、导弹制导以及海洋探测等领域中发挥着重要的作用。
2.卫星导航系统:陀螺力学原理也在全球定位系统(GPS)等卫星导航系统中得到了应用。
卫星导航系统通过测量陀螺仪的旋转速度和方向来确定接收器的位置和速度。
陀螺力学原理对于提高GPS的定位精度和可靠性起着关键作用。
3.船舶导航系统:陀螺力学原理在船舶导航系统中也有重要应用。
通过安装陀螺仪来实现船舶的姿态稳定和方向控制,提高船舶的导航精度。
陀螺力学原理的发展趋势1.小型化和集成化:随着科技的发展,陀螺力学原理的应用将越来越小型化和集成化。
未来的陀螺仪设备将更加紧凑、轻便,适用于更广泛的应用场景。
2.自适应控制:自适应控制是未来陀螺力学原理应用的一个重要方向。
通过引入自适应控制算法,陀螺仪能够根据外界环境的变化自动调整参数,提高稳定性和导航性能。
3.新材料和新技术:未来的陀螺力学原理应用将会在材料和技术方面得到进一步的发展。
编号0710118毕业论文(2011届本科)题目:陀螺仪的原理及其应用系(部)院:物理与机电工程学院专业:物理学作者姓名:李淑娟指导教师:李守义职称:副教授完成日期:2011 年 5 月20 日二○一一年五月目录河西学院本科生毕业论文(设计)诚信声明 (2)河西学院本科生毕业论文(设计)任务书 (3)河西学院本科生毕业论文(设计)开题报告 (5)陀螺仪的原理及其应用 (7)0 引言 (7)1 陀螺仪的原理 (9)2 几种陀螺仪介绍 (10)2.1微机械陀螺仪 (10)2.1.1 微机械陀螺仪姿态测量原理 (10)2.1.2 微机械陀螺的发展 (11)2.2硅微振动陀螺仪 (12)2.2.1 振动陀螺仪的原理 (12)2.2.2 驱动力的表达式 (12)2.2.3 硅微振动陀螺仪的发展 (14)2.3光纤陀螺仪 (14)2.3.1 光纤陀螺仪的原理 (14)3.3.2 光纤陀螺的发展 (15)2.4弹性驱动陀螺仪 (16)2.4.1 弹性驱动陀螺仪的启动原理 (17)2.4.2弹性驱动陀螺仪的发展 (19)3 结论 (19)致谢 (20)参考文献 (21)文献综述 (22)河西学院本科生毕业论文(设计)题目审批表 (24)河西学院物理与机电工程学院指导教师指导毕业论文情况登记表 (25)河西学院毕业论文(设计)指导教师评审表 (25)河西学院本科生毕业论文(设计)答辩记录表 (27)河西学院本科生毕业论文(设计)诚信声明本人郑重声明:所呈交的本科毕业论文,是本人在指导老师的指导下独立进行研究工作所取得的成果,成果不存在知识产权争议,除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
本科毕业论文(设计)作者签名:二〇一一年五月二十日河西学院本科生毕业论文(设计)任务书河西学院本科生毕业论文(设计)开题报告陀螺仪的原理及其应用河西学院物理与机电工程学院李淑娟摘要:介绍了陀螺仪的来源及发展历史,分析了陀螺仪的工作原理以及在各方面的应用,然后重点介绍了微机械陀螺仪、硅微振动陀螺仪、光纤陀螺仪和弹性驱动陀螺仪,分别从它们各自的工作原理入手,推导了其工作驱动方程,并分析了它们各自在未来的发展趋势及其在航海、航天、军事等各方面的应用价值。
university of science and technology of china 96 jinzhai road, hefei anhui 230026,the people’s republic of china陀螺仪实验实验报告李方勇 pb05210284 sist-05010 周五下午第29组2号2006.10.22 实验题目陀螺仪实验(演示实验)实验目的1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率与外力矩的关系。
实验仪器①三轴回转仪;②计数光电门;③光电门用直流稳压电源(5伏);④陀螺仪平衡物;⑤数字秒表(1/100秒);⑥底座(2个);⑦支杆(2个);⑧砝码50克+10克(4个);⑨卷尺或直尺。
实验原理1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度?为:?=d?r/dt=m/ip (1) 式中?r为陀螺仪盘的角速度,ip为陀螺仪盘的转动惯量。
m=f.r为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:f=m(g-a) (2) 式中g为重力加速度,a为轨道加速度(或线加速度)轨道加速度与角加速度的关系为:a=2h/tf2; ?=a/r (3) 式中h为砝码下降的高度,r如图1所示为转轴的半径,tf为下落的时间。
将(2)(3)代入(1)2ip?2mr2t?h2mgr可得: (4)2f测量多组tf和h的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物w使陀螺仪ab轴(x轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕x轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量l:l=ip.?r (5) 当在陀螺仪的另一端挂上砝码m(50g)时就会产生一个附加的力矩m*,这将使原来的角动量发生改变:dl/dt=m*=m*gr* (6) 由于附加的力矩m*的方向垂直于原来的角动量的方向,将使角动量l变化dl,由图1可见: dl=ld?这时陀螺仪不会倾倒,在附加的力矩m*的作用下将会发生进动。