弹性力学第2章应力分析
- 格式:pdf
- 大小:214.01 KB
- 文档页数:21
弹性力学的应力分析与优化弹性力学是一门研究物体在受力作用下的变形和恢复性质的学科。
在工程领域中,弹性力学的应用十分广泛,特别是在结构设计和材料优化方面。
本文将探讨弹性力学中的应力分析与优化方法。
一、应力分析弹性力学的应力分析研究了物体在受力作用下的应力分布情况。
应力是物体内部分子间相互作用的结果,是描述物体抵抗外力的能力的物理量。
应力在弹性力学中分为三种类型:拉应力、剪应力和压应力。
拉应力(tensile stress)是指物体在受拉力作用下产生的应力,通常用符号σ表示。
拉应力的计算公式为:σ = F / A其中,F为物体上的拉力,A为物体上受力截面的面积。
拉应力越大,物体的变形程度越大。
剪应力(shear stress)是指物体在受剪力作用下产生的应力,通常用符号τ表示。
剪应力的计算公式为:τ = F / A其中,F为物体上的剪切力,A为物体上受力截面的面积。
剪应力越大,物体的变形程度越大。
压应力(compressive stress)是指物体在受压力作用下产生的应力,通常也用符号σ表示。
压应力的计算公式与拉应力相同,即:σ = F / A不同的是,压应力与拉应力的方向相反。
压应力越大,物体的变形程度越大。
在应力分析过程中,我们可以通过解析法或数值模拟法来求解物体内部的应力分布情况。
解析法主要适用于简单几何形状的物体,例如直杆或简支梁。
数值模拟法则可以用来求解复杂几何形状的物体,例如复杂结构的建筑或机械零件。
二、优化设计在弹性力学的应用中,我们常常需要通过优化设计来提高物体的性能或减少材料的使用量。
优化设计旨在寻找最优的结构形式或材料参数,使得物体在给定的约束条件下达到最佳的性能指标。
优化设计可以分为两种类型:形状优化和拓朴优化。
形状优化主要是通过改变物体的几何形状来优化结构。
例如,在某一受力部位增加材料的厚度或减小切削孔的直径,以提高物体的刚度或承载能力。
形状优化的方法有很多,包括拟合法、参数法和拓扑有机化等。

第二章知识点: (1)应力矢量()0limS FSνσ∆→∆∆其中,ν是S ∆的法向量(2)应力张量()()()111121321222323132333σσσσσσσσσσσσσ⎛⎫⎛⎫ ⎪ ⎪ ⎪== ⎪ ⎪⎪ ⎪⎝⎭⎝⎭其中,()()()123,,σσσ 分别是123,,e e e方向的应力矢量,且()()()111122133121122223323113223333e e e e e e e e e σσσσσσσσσσσσ=++=++=++上式可以写为张量形式ij i j e e σσ=或者用正应力剪应力将应力张量写为x xy xz yx y yz zx zy z σττστστττσ⎛⎫ ⎪= ⎪ ⎪⎝⎭(3)柯西公式(应力矢量和应力张量的关系)()νσνσ=⋅其中,ν是斜面的法向量,对于表面来说,就是外法向量。
可以将柯西公式写成如下形式()i i mj m j i mj i m j i mj im j i ij j e e e e e e e e νσνσνσνσνσδνσ=⋅=⋅=⋅== 即()i ij j νσνσ=这其实是三个式子,分量形式为()()()111122133112112222332231132233333++++i i i i i i νννσνσνσνσνσσνσνσνσνσσνσνσνσνσ==++====在表面上,所求出的()νσ就是外载荷。
(4)应力张量的转轴公式''''m n ij m i n j σσββ=证明如下:'''''''''''''''''''',ij i j m n m n i m i m j n j n ij m i n j m n m n m n m n ij m i n je e e e e e e e e e e e σσσββσββσσσββ====∴=∴=也可以将转轴公式写为矩阵形式[][][][]'Tσβσβ=其中,[]σ、[]'σ是坐标系变换前后的应力张量的分量,[]()'m i ββ=,'m i β是i e 在'm e上的分量,可以用如下公式计算()''cos ,m ii m e e β=(5)剪应力互等定理根据微元体的力矩平衡,可以得到 ,,yz zy xz zx xy yx ττττττ===也就是说ij ji σσ=应力张量是一个二阶对称的张量 (6)主应力由于应力张量是二阶对称的,所以可以将其对角化[][][]123Tσσβσβσ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦并且123,,σσσ从大到小排列,他们称为主应力,[]β是三个主应力的方向。
弹性力学的应力弛豫与塑性变形分析弹性力学是研究物体在变形后能够恢复原状的力学学科。
在实际应用中,很多材料在受力后会发生塑性变形,即不能完全恢复原来的形状。
本文将重点探讨弹性力学中的应力弛豫和塑性变形现象,并分析其原因和应用。
一、应力弛豫应力弛豫是指材料在受力后,其内部应力随时间逐渐减小的过程。
这种现象可以在实验中观察到,常见于高分子材料、液晶等多种物质中。
应力弛豫的形成可以归结为材料内部的结构重排和分子运动。
在弹性力学中,材料受力后会发生分子位移和能量重分布,导致内部结构的变化。
这些变化需要一定的时间来完成,因此材料内部的应力也会随时间逐渐减小。
这种时间相关的应力变化称为弛豫,表现为应力-时间的曲线。
应力弛豫的具体原因可以从分子层面进行解释。
在材料受力后,分子会发生位移和转动,从而改变原有的排列和结构。
这些结构的变化需要时间来完成,直到达到新的力平衡状态。
因此,在应力弛豫过程中,材料内部的分子会经历一系列的位移和调整,导致应力逐渐减小。
应力弛豫对材料的影响是多方面的。
首先,它可以改变材料的物理性质,如导电性、热传导性等。
其次,它还可以影响材料的力学性能,如强度、刚度等。
因此,对于需要长时间保持稳定性能的材料,在设计和选择时需要考虑应力弛豫的效应。
二、塑性变形分析与应力弛豫不同,塑性变形指的是在外力作用下,材料发生的不可逆性变形。
这种变形无法通过解除外力或应力恢复为原始状态。
塑性变形是金属材料等多种材料中常见的力学现象。
塑性变形的发生需要材料达到一定的应力水平,使其超过了其弹性极限。
当材料达到弹性极限后,其内部原子会发生塑性畸变,从而导致整体的变形。
这种塑性畸变包括原子间的位移和滑移等,使得材料的晶格结构变得不规则。
塑性变形的原因可以从晶体结构和材料缺陷两个方面进行解释。
首先,晶体结构本身在受力时会发生弹性和塑性的变化。
其次,材料中的晶界、位错和孔隙等缺陷也会在受力时起到重要作用,促进塑性变形的发生。
第二章 应力分析研究弹性力学问题要从三方面规律(条件):平衡、几何、物理来建立,本章就是研究第一个规律:平衡规律。
第1节 内力和外力1.1 外力:物体承受外因而导致变形,外因可以是热力作用、化学力作用、电磁力作用和机械力作用;另一方面从量纲分类,外力主要为体积力和表面积力。
我们讨论的外力是属于机械力中的体力和面力的范围。
1. 外部体力:作用在物体单位体积(质量)上的力如重力(惯性力)。
量纲:力/(长度)3。
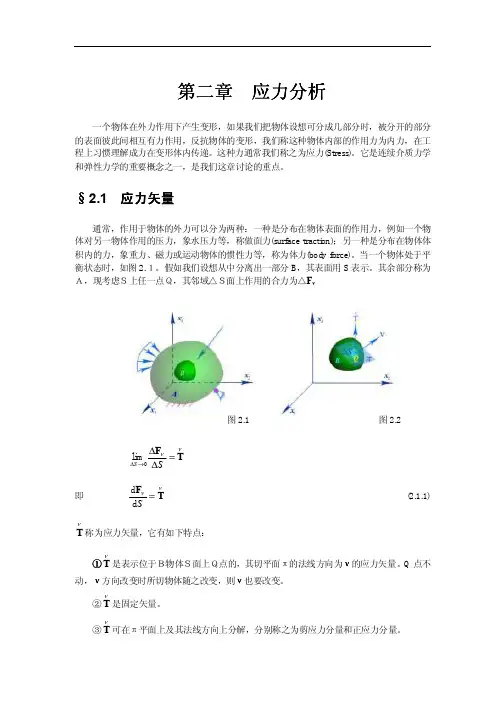
求V 中任意点P 上承受体力采用极限方法:X X 2X X 2第2节 应力和应力张量2.1 应力当变形体受外力作用时,要发生变形,同时引起物体内部各点之间相互作用力(抵抗力)——内力,为了描述物体内任意点P 的内力可采取如下方法:过P 点设一个截面S 将V 分为两部分:(作用力与反作用力)FF -l n n x ==1、m n n y ==2、n n n z ==3。
即n t m t l t n t n t n t n t t z y x i i n )()()(3)3(2)2(1)1()()( ++=++==,,1S n P B C S A B C ∆∆∆∆==0)()(=++-V f S t S t i i n ∆∆∆而 S n S t t i i i i ∆∆=-=-,)()(代入上式,并忽略高阶微量 0)()(=-S n t S t i i n ∆∆或 )()(i i n t n t =展开为 3)3(2)2(1)1()(n t n t n t t n++= 或n t m t l t t z y x n )()()()( ++=2.1 应力张量每个坐标面上的应力矢量又可以沿三个坐标面分解三个分量,比如坐标面法线为x 1jxj j j z xz y xy x xx x e e e e e e e e t t σσσσσσσσ==++=++==1313212111)()1(x 2x 1 x 1(x)x 3,,32S n PAB S n PAC ∆=∆∆=∆同理,得j yj j j z yz y yy x yx y e e e e e e e e t t σσσσσσσσ==++=++==2323222121)()2(jzj j j z zz y zy x zx z e e e e e e e e t t σσσσσσσσ==++=++==3333232131)()3(将法线方向n 取为单位长度,则将式(3.25)代入式(3.26),得3.3.2.讨论:) ( 333333222222253.l p l p l p l p ⎪⎪⎪⎭⎪⎬====σσσσ) (2631232221.l l l =++7)=1 ()()+() (23322222311.p p p σσσ+(1):如果以p 1,p 2,p 3为坐标轴建立直角坐标系,则在此坐标系中,上式为一椭球面方程,主半轴分别为σ1,σ2,σ3,称为应力椭球面。
第二章应力状态分析一、内容介绍弹性力学的研究对象为三维弹性体,因此分析从微分单元体入手,本章的任务就是从静力学观点出发,讨论一点的应力状态,建立平衡微分方程和面力边界条件。
应力状态是本章讨论的首要问题。
由于应力矢量与内力和作用截面方位均有关。
因此,一点各个截面的应力是不同的。
确定一点不同截面的应力变化规律称为应力状态分析。
首先是确定应力状态的描述方法,这包括应力矢量定义,及其分解为主应力、切应力和应力分量;其次是任意截面的应力分量的确定—转轴公式;最后是一点的特殊应力确定,主应力和主平面、最大切应力和应力圆等。
应力状态分析表明应力分量为二阶对称张量。
本课程分析中使用张量符号描述物理量和基本方程,如果你没有学习过张量概念,请进入附录一,或者查阅参考资料。
本章的另一个任务是讨论弹性体内一点-微分单元体的平衡。
弹性体内部单元体的平衡条件为平衡微分方程和切应力互等定理;边界单元体的平衡条件为面力边界条件。
二、重点1、应力状态的定义:应力矢量;正应力与切应力;应力分量;2、平衡微分方程与切应力互等定理;3、面力边界条件;4、应力分量的转轴公式;5、应力状态特征方程和应力不变量;知识点:体力;面力;应力矢量;正应力与切应力;应力分量;应力矢量与应力分量;平衡微分方程;面力边界条件;主平面与主应力;主应力性质;截面正应力与切应力;三向应力圆;八面体单元;偏应力张量不变量;切应力互等定理;应力分量转轴公式;平面问题的转轴公式;应力状态特征方程;应力不变量;最大切应力;球应力张量和偏应力张量§2.1 体力和面力学习思路:本节介绍弹性力学的基本概念——体力和面力,体力F b和面力F s的概念均不难理解。
应该注意的问题是,在弹性力学中,虽然体力和面力都是矢量,但是它们均为作用于一点的力,而且体力是指单位体积的力;面力为单位面积的作用力。
体力矢量用F b表示,其沿三个坐标轴的分量用F b i(i=1,2,3)或者F b x、F b y和F b z表示,称为体力分量。