步进电动机入门篇-东方马达
- 格式:pdf
- 大小:1.45 MB
- 文档页数:32


什么是步进电机?步进电机:也称脉冲电机,是一种将电脉冲转化为角位移的执行机构。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。
可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
基本原理通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。
该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。
当定子的矢量磁场旋转一个角度。
转子也随着该磁场转一个角度。
每输入一个电脉冲,电动机转动一个角度前进一步。
它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。
改变绕组通电的顺序,电机就会反转。
所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
电机开环控制一种控制电机、不使用反馈回路、就能进行速度控制及定位控制,即所谓的电机开环控制。
步进电机开环控制原理定子一相绕组流过直流电流,最近该相的转子齿被定子相吸引,电磁转矩大于负载转矩从而使转子运动。
电机基本分类按电压种类分:AC(交流)驱动、DC(直流)驱动。
按旋转速度与电源频率关系分:同步电机、异步电机。
步进电机概要1.步进电机的地位步进电机属于:DC驱动的同步电机,但无法直接用DC或AC电源来驱动,需要配备驱动器。
2.步进电机驱动电路的功能驱动电路任务:按顺序指令切换DC电源的电流流入步进电机的各相线圈。
驱动电路将电机定子与DC电源连接在一起工作。
驱动器(驱动电路)由决定换向顺序的控制电路(或称为逻辑电路)与控制电机输出功率的换相电路(或称为功率电路(Power stage))组成。
步进电机基本知识(2009-01-08 13:51:30)1、步进电机:是一种将电脉冲转化为角位移或线位移的执行机构。
其特点是没有积累误差(精度为100%),广泛应用于各种开环控制。
2、步进电机分类:永磁式(PM),反应式(VR),混合式(HB)。
3、保持转矩:是指步进电机通电,但没有转动时,定子锁住转子的力矩。
4、精度:为步进角的3~5%,且不累积。
5、细分驱动器:是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机的运转的。
细分功能完全是由驱动器靠精确控制电机的相电流所产生的,与电机无关。
对于2,4相电机,细分后的步距角等于电机的整步步距角除以细分数。
对于3相反应式电机,细分后的步距角等于电机的半步步距角除以细分数。
6、步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。
0.9°/1.8°(表示半步工作时为0.9°,整步工作时为1.8°)此步距角为电机固有步距角。
7、相数:产生不同对极N、S磁场的激磁线圈对数。
常用m表示。
8、失步:电机运转时运转的步数,不等于理论上的步数。
称之为失步。
9、最大空载起动频率:电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
10、最大空载运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
11、步进电机最好不使用整步状态,整步状态时振动大。
12、电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
方向由导电顺序决定。
控制步进脉冲信号的频率,可以对电机进行精确调速;控制步进脉冲的个数,可以对电机进行精确定位。
13、步进电机驱动器:是把计算机控制系统提供的弱信号放大为步进电机能够接受的强电流信号。
14、拍数:是完成一个磁场周期性变化所需脉冲数。
指电机转过一个齿距角所需脉冲数。
15、脱机信号free:此信号为选用信号,并不是必须要用的,只有在一些特殊情况下使用,此端为低电平有效,这时电机处于无力矩状态;此端为高电平或悬空不接时此功能无效,电机可正常运行,此功能若用户不采用,只需将此端悬空即可。
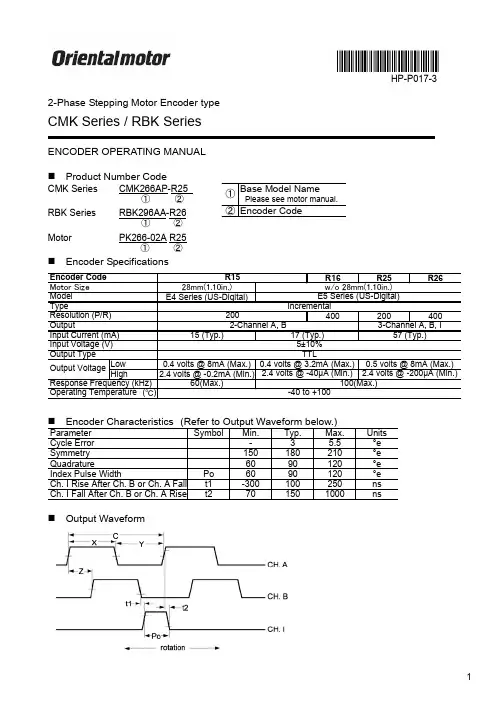
Orientalmotor2-Phase Stepping Motor Encoder typeCMK Series / RBK SeriesENCODER OPERATING MANUALProduct Number CodeCMK Series CMK266AP-R25RBK Series RBK296AA-R26MotorPK266-02A R25Encoder SpecificationsOutput Waveform① ② ① ② ① ②HP-P017-3CPR (N): The number of Cycles Per Revolution. One Shaft Rotation: 360 mechanical degrees, N cycles. One Electrical Degree ( °e): 1/360th of one cycle.One Cycle (C): 360 electrical degrees ( °e). Each cycle can be decoded into 1 or 4 codes, referred to as X1 or X4 resolution multiplication.Symmetry: A measure of the relationship between (X) and (Y) in electrical degrees, nominally 180°e. Quadrature (Z): The phase lag or lead between channels A and B in electrical degrees, nominally 90°e.Index (CH I.): The index output goes high once per revolution, coincident with the low states of channels A and B, nominally 1/4 of one cycle (90°e).Position Error: The difference between the actual shaft position and the position indicated by the encoder cycle count. Cycle Error: An indication of cycle uniformity. The difference between an observed shaft angle which gives rise to one electrical cycle, and the nominal angular increment of 1/N of a revolution.Pin-outs E5 SeriesEncoder Lead Wire for without Index (R15, R16)Encoder Lead Wire for with Index (R25, R26)E4 SeriesEncoder Lead WireHousing: 50-57-9450 (Molex) Terminal: 16-02-0104 (Molex) Lead: UL Style 3265, AWG 24 Length: 600mm (24 in.)Housing: 50-57-9450 (Molex) Terminal: 16-02-0104 (Molex)Lead: UL Style 3265, AWG 24 Length: 600mm (24 in.)Housing: 51021-0400 (Molex) Terminal: 50079-8000 (Molex)Lead: UL Style 3265, AWG 28 Length: 600mm (24 in.)。
★步进电机,是一种能够接受数字信号的机械动力装置,有着非常精确的步距角,体积小巧,输出力矩较大。
有好几十种规格可以选择。
★步进电机的保持转矩,近似于传统电机所称的“功率”。
当然,有着本质的区别。
步进电机的物理结构,完全不同于交流、直流电机,步进电机的输出功率是可变的。
通常根据需要的转矩大小(即所要带动物体的扭力大小),来选择哪种型号的步进电机。
大致说来,扭力在0.8N.m以下,选择28、35、39、42(电机的机身直径或方度,单位:mm);扭力在1N.m左右的,选择57电机较为合适。
扭力在几个N.m或更大的情况下,就要选择75、86、90、110、130等规格的步进电机。
对于步进电机的转速也要特别考虑。
因为,步进电机的输出转矩,与转速成反比。
就是说,步进电机在低速(每分钟几百转或更低转速,其输出转矩较大),在高速旋转状态的转矩(1000转/分--9000转)就很小了。
当然,有些工作环境需要高速步进电机,就要对步进电机的线圈电阻、电感等指标进行衡量。
选择电感稍小一些的步进电机,作为高速步进电机,能够获得较大输出转矩。
反之,要求低速大力矩的情况下,就要选择电感在十几或几十mH,电阻也要大一些为好。
★步进电机空载起动频率,通常称为“空起频率”。
这是选购步进电机比较重要的一项指标。
如果要求在瞬间频繁启动、停止,并且,转速在1000转/分钟左右(或更高),通常需要“加速启动”。
如果需要直接启动达到高速运转,最好选择反应式或永磁步进电机。
这些步进电机的“空起频率”都比较高。
★步进电机的相数选择,这项内容,很多客户几乎没有什么重视,大多是随便购买。
其实,不同相数的步进电机,工作效果是不同的。
相数越多,步距角就能够做的比较小,工作时的振动就相对小一些。
很多场合,使用两相步进电机(四相步进电机)比较多。
在高速大力矩的工作环境,选择三相步进电机,还是很实用的。
★特种步进电机能够防水、防油,用于某些特殊场合。
例如水下机器人,就需要放水步进电机。
步进电机14问------------------1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.步进电机分哪几种?步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。
这种步进电机的应用最为广泛。
3.什么是保持转矩(HOLDING TORQUE)?保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
4.什么是DETENT TORQUE?DETENT TORQUE 是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
5.步进电机精度为多少?是否累积?一般步进电机的精度为步进角的3-5%,且不累积。
6.步进电机的外表温度允许达到多少?步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。

步进电机型号及参数1. 引言步进电机是一种常见的电机类型,常用于需要精确运动控制的设备中,如3D打印机、CNC机床等。
本文将介绍步进电机的常见型号及其参数。
了解步进电机的型号和参数对于选择合适的电机非常重要。
2. 型号分类步进电机有多种不同的型号,按照外形、尺寸和电气特性等方面可以进行分类。
常见的步进电机型号包括以下几种:2.1 2相步进电机2相步进电机是最常见的步进电机类型之一。
它包括4个线圈,每个线圈可以由驱动器单独控制,可以实现更精确的旋转控制。
2相步进电机的精度和控制性很高,但相对较贵。
2.2 5相步进电机5相步进电机是一种特殊的步进电机,它包括5个线圈。
相比于2相步进电机,5相步进电机具有更高的分辨率和更平滑的运动。
由于多个线圈的控制,5相步进电机通常可以更准确地定位。
2.3 3D打印机专用步进电机3D打印机专用步进电机一般是为了满足3D打印机高速、高精度的运动要求而设计的。
这些电机通常具有较低的噪音和振动。
常见的型号包括NEMA 17和NEMA 23等。
3. 参数介绍无论是哪种型号的步进电机,都具有一些常见的参数,下面将介绍一些常见的步进电机参数:3.1 步角步角是步进电机旋转一步所需的角度。
通常,步进电机的步角为1.8度,也有一些特殊的步进电机具有0.9度的步角。
步角越小,电机的分辨率越高。
3.2 额定电压和电流额定电压和电流是步进电机正常工作时的电压和电流。
选择适当的额定电压和电流可以保证步进电机的正常运行和寿命。
3.3 扭矩扭矩是步进电机输出的力矩大小。
通常,步进电机的扭矩与电流成正比,但也受到一些其他因素的影响,如电机的设计和进一步细分等。
3.4 驱动方式步进电机的驱动方式包括全步进驱动和细分驱动。
全步进驱动是最常见的驱动方式,它将电流以全功率施加到单个线圈上,能够提供最大的扭矩。
细分驱动将输入电流细分为更小的步进,能够提供更平滑、精确的运动。
4. 总结本文介绍了步进电机的常见型号及其参数。
步进电机经过近百年发展,在全球范围内涌现出大量品牌,每家品牌各有所长。
今天小编带大家来逐个分析中国工业市场各品牌优劣势。
进口品牌日本1、东方马达(1885年成立于日本),最悠久的历史,最丰富的产品,最贵的价格。
2、信浓马达(1918年成立于日本),以工厂方式生存,优势为国内工厂,大批量生产成本优势。
欧洲1、意大利爱维(成立于1977年),国内常州有生产工厂,总线(EtherCAT,profinet)控制技术最为稳定,部分产品UL认证2、德国纳诺达克(成立于1991年),国内常州有生产工厂,各类非标定制,一体机较为稳定,部分产品UL认证韩国1、FASTECH,早前在国内市场还不错,主要以闭环和总线为主。
近些年主要精力在海外市场,国内市场份额不如从前国产品牌1、鸣志,收购美国技术,在国产品牌,技术属于领先,但市场推广一般2、雷赛,国内较早的品牌,推广较早,市占率高,产品各说风云。
技术层面属于跟随3、研控,小雷赛,雷赛做啥他做啥其他品牌国内还有不下100家其他品牌,基本各自凭关系做部分客户。
这些品牌基本无研发实力,或者研发实力局限在某一块小领域。
主要以贸易形势存在,客户需要什么,他们到市场找什么。
经常出现不同品牌送给客户相同产品。
小编整理于20怎样的步进电机品牌或厂家称得上高端?作为国内FA工程师,个人认为至少符合以下两点:1,技术积累有30年以上并且主业聚焦步进电机和驱动器(步进电机和驱动器虽然使用简单,但要做好做精,需要大量应用经验的积累)。
2,在某个领域有独特的技术(比如日本东方马达的ABOZ免电池绝对值技术,意大利EVER ELETRONICA的总线EtherCAT,PROFINET技术)。
结合以上几点要求,我们来逐一分析:1,技术积累30年以上,有如下品牌(日本东方马达-1885年成立;意大利EVER ELETTRONICA-1977年成立;美国Applied Motion Products Inc.-1978年成立,现已被中国MOONS收购;德国NANOTEC-1991年成立)。

步进电机知识详解,再不怕看不懂步进电机了!步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
作为电力人对步进电机的也不能仅限于认识而已,应该深入了解它的结构、基本原理以及应用,接下来小七将从三个方面带大家全面认识步进电机。
01什么是步进电机步进电机是一种直接将电脉冲转化为机械运动的机电装置,通过控制施加在电机线圈上的电脉冲顺序、频率和数量,可以实现对步进电机的转向、速度和旋转角度的控制。
在不借助带位置感应的闭环反馈控制系统的情况下、使用步进电机与其配套的驱动器共同组成的控制简便、低成本的开环控制系统,就可以实现精确的位置和速度控制。
02基本结构和工作原理基本结构:工作原理:步进电机驱动器根据外来的控制脉冲和方向信号,通过其内部的逻辑电路,控制步进电机的绕组以一定的时序正向或反向通电,使得电机正向/反向旋转,或者锁定。
以1.8度两相步进电机为例:当两相绕组都通电励磁时,电机输出轴将静止并锁定位置。
在额定电流下使电机保持锁定的最大力矩为保持力矩。
如果其中一相绕组的电流发生了变向,则电机将顺着一个既定方向旋转一步(1.8度)。
同理,如果是另外一项绕组的电流发生了变向,则电机将顺着与前者相反的方向旋转一步(1.8度)。
当通过线圈绕组的电流按顺序依次变向励磁时,则电机会顺着既定的方向实现连续旋转步进,运行精度非常高。
对于1.8度两相步进电机旋转一周需200步。
两相步进电机有两种绕组形式:双极性和单极性。
双极性电机每相上只有一个绕组线圈,电机连续旋转时电流要在同一线圈内依次变向励磁,驱动电路设计上需要八个电子开关进行顺序切换。
单极性电机每相上有两个极性相反的绕组线圈,电机连续旋转时只要交替对同一相上的两个绕组线圈进行通电励磁。
驱动电路设计上只需要四个电子开关。
在双极性驱动模式下,因为每相的绕组线圈为100%励磁,所以双极性驱动模式下电机的输出力矩比单极性驱动模式下提高了约40%。
1类01步进电机 步进电动机分反应式(磁阻式)、永磁式和混合式三大类。
反应式步进电动机(VR) 三相反应式步进电动机结构示意图如图1所示。
图1:三相反应式步进电动机结构示意图 定子六个磁极上绕有三相星形绕组,转子外圆周和磁极极靴上开有等齿距的小齿。
转子齿数为20 个,每个磁极上有 3 个小齿,小齿相邻两相的两个磁极错开1 /3齿距(一般错开1 /m,m为相数)。
由于是绕组轮流通电,所以当 A 相通电时,定转子之间的磁通以磁 阻最小取向,使转子齿(位置随机)与A相磁极小齿对齐。
此时,B相磁极上小齿沿ABC方向超前转子齿错开1 /3齿距。
A相断电、B相通电时,转子则沿ABC转过1 /3齿距。
此时, C 相磁极上小齿又超前转子齿错开1 /3齿距。
B相断电、C相通电时,转子则沿ABC方向又转过 1 /3 齿距。
如此便随脉冲的A→B→C分配方式02032要技术参数步进运动下去。
脉冲通电有多种分配方式,步距角的大小可随脉冲分配方式不同而变化。
实现这种分配的是一种环形脉冲分配器,绕组通断则由功率开关管实施。
以上是三相反应式步进电动机的工作原理,多相反应式步进电动机的工作原理与三相反应式步进电动机基本一样。
反应式步进电动机的优点是步距角小、步距精度高、起动频率高、负载能力强,可实现电气细分; 缺点是易振荡(需要加装阻尼器进行抑制)、驱动功率大、效率低。
永磁式步进电动机(PM) 两相永磁式步进电动机结构示意图如图2所示。
图2:两相永磁式步进电动机结构示意图 转子为两对极的“+”字形磁体(也可以为多对极的星形磁体),定子则相应为两相绕组 (也可为多相绕组)。
当定子A相或B相单独通电时,转子转向A相或B相磁场轴线;当 A、B相同时通电时, 转子转向A、B 相磁场合成轴线。
当绕组按单四拍方式 A→B→(-A)→(-B)和双四拍方式 A、B →(B、-A)→(-A、-B )→(-B、A)通电时,步距角为45°;当绕组按八拍方式 A→A、B→B→(B、-A)→(-A)→(-A、-B)→(-B)→(-B、A)通电时,步距角为 22.5°。
在线研讨会教程步进电动机入门篇欧立恩拓电机商贸(上海)有限公司前言我们竭诚感谢您参与东方马达网络技术研讨会,本讲义为《步进电动机入门篇》。
⏹本讲义已获得著作权法的保障。
如未获得欧立恩拓电机商贸(上海)有限公司的授权同意书,请勿将本讲义的部分或全部内容私自复印、存档、变更或转载。
⏹本讲义内容仅作学习使用,因此当内容有变更时将不另行通知,内容中记载的规格资料也仅作为参考,变更时将不另行通知,因此产品规格部分请参考最新版本的产品目录。
⏹本讲义的内容及产品的规格部分,可能有因经过改良而进行变更的情况,届时将不再予以另行通知。
⏹ORIENTAL MOTOR以及αstep等商标皆是ORIENTAL MOTOR CO.,LTD.于日本和其他国家已经完成登记的商标。
目录1.步进电动机的特征2.构造与动作原理3.运转速度-转矩特性4.关于运转控制的相关设定5.小测验1-1 步进电动机的动作1-2 运转系统1-3 运转量与脉冲数的比例关系1-4 运转速度与脉冲速度的比例关系1-5 具备自我保持力以一定角度循序运转的电动机·步级角0.72º (五相步进)·停止精度±0.05º 以内(无负载时,不存在累积误差)注:步级角:接收到一个脉冲时马达的旋转量。
1-2.運轉系統1-2 运作系统 运转系统构成的3要素・控制器・驱动器・步进电动机注: 控制器:输出脉冲指令,又叫脉冲发生器;驱动器:根据脉冲信号为马达提供电流,我司产品都是驱动器和马达组合销售的;脉冲信号:方块状的脉波,对于马达转速及旋转量起着关键作用。
电压时间T :脉冲周期 [sec]驱动器步进电动机 控制器提供电力脉冲信号1-3 运转量与脉冲数的比例关系设定脉冲数即可达到正确的定位运转。
电动机运转量[°]=步级角[°/step]×脉冲数1-4 运转速度与脉冲速度的比例关系设定脉冲速度(频率)即可达到正确的运转速度控制。
电动机运转速度[ r/min ] 步级角 [º/步级]X 脉冲速度 [ Hz ] X 601-5 具备自我保持力-通电状况下-具备自我保持力。
-停电状况下-自我保持力消失。
升降设备传动时,请使用附电磁刹车电动机。
注:自我保持力:步进马达与普通感应电动机不同,通电后并不会转动,需要输入脉冲才会转动,那么此时可以提供一个抵抗转动的自我保持力。
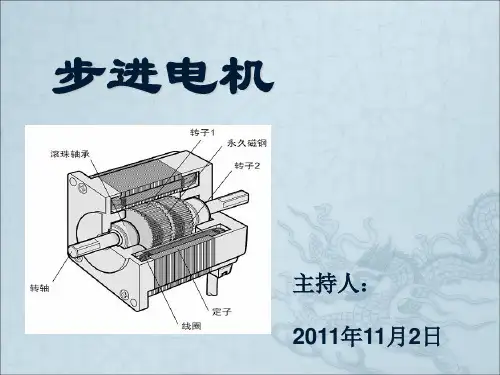
2 构造与动作原理2-1 步进电动机的构造2-2 转子的构造2-3 定子的构造2-4 动作原理2-1 步进电动机的构造(1)◆定子与转子部分切割成数小齿构造;◆转子:转动后通过输出轴提供外部机构动力;◆定子:饶有铜线的电磁铁,可以选择性通电激磁,提供吸引转子转动的力。
滚珠轴承定子转子1永久磁铁 转子2出力轴线圈2-1 步进电动机的构造(2)转子1转子2定子出力轴永久磁铁线圈轴承托架凸缘2-2 转子构造齿数 50 齿 齿距(τR) 7.2°转子1转子2◆转子有两个,并且每个转子上有50个小齿,内部分别带有N 极和S 极的永磁铁,因此50个小齿带有N 极磁性,50个小齿带有S 极磁性; ◆从轴向看过去,可以看到共100个小齿;2-3 定子构造(整体)各磁极前端刻有小齿A 相 出力轴 转子2B 相C 相D 相E 相定子与转子间的缝隙非常小,故若马达损坏,请勿自行拆卸,会造成装配精度不够,步进电动机定位误差变大。
定子转子12-3 定子构造定子小齿中心线与对应转子小齿中心线的偏差为1/10的齿隙,对于5相步进电动机来说,即为0.72度。
2-4 动作原理(A 相励磁)A 相磁极的小齿与转子1的小齿相互吸引。
B 相磁极的小齿与转子2的小齿0.72º的位置偏差量。
转子1转子2直流电源无偏差无偏差转子12-4 动作原理(B 相励磁)B相磁極時的小歯與轉子2的小歯於停止動作時, 是呈現相互吸引的狀態。
B 相磁极的小齿与转子2的小齿停止动作时,是呈现相互吸引的状态。
转子2 转子1直流电源定子1转子15相步进电动机的基本步级角为0.72度,2相步进电动机的基本步级角为1.8度。
3运转速度-转矩特性3-1 运转速度-转矩特性3-2 运转模式3-1 运转速度–转矩特性以下为5相步进电动机新产品RKⅡ系列的转速—转矩特性图。
5相步进电动机的基本步级角为0.72度,并且随着转速的上升,转矩是下降的。
3-2 运转模式加速时间减速时间 时间时间脉冲信号起动脉冲信号 运转脉冲信号速度运转脉冲数运转脉冲数速度脉冲信号自起动运转模式加减速运转模式起动脉冲信号◆可以从0转速瞬间达到要求转速的模式。
◆从0转速必须经过一段时间的加速过程达到要求转速的模式。
4-1 定位运转4-2 振动特性4-3 减少振动的方法4-4 转速-温度上升特性4-5 降低温度上升的方法4-1-1 运转模式(梯形驱动) 定位运转的设定项目·运转脉冲数·运转脉冲速度·启动脉冲速度·加减速斜率移动运转脉冲速度起动脉冲速度速度加速时间运转脉冲数减速时间时间脉冲信号4-1-2 运转脉冲数的简易计算移动量40mm例) 求出使工作台移动40mm时,所必要的脉冲数电动机运转一圈时,所需要的脉冲数:500个电动机运转一圈时,工作台可移动的距离:10mm(1)欲使工作台移动40mm时,所必要的电动机运转量电动机的运转量=40mm/10mm=运转4圈(2)使电动机运转4圈时,所需要的脉冲数脉冲数=500脉冲*4圈=2000脉冲例) 求出使工作台在0.6秒移动40mm 时,所必要的脉冲速度梯形驱动的移动时间等同于长为0.5高为4000矩形 面积移动时间=t-ta =0.6-0.1=0.5sec在0.5秒输出2000脉冲时的脉冲速度 脉冲速度=2000脉冲/0.5sec=4000Hz脉冲速度4000Hz 时电动机的运转速度电动机运转速度=4-1-3 运转脉冲速度的简易计算脉冲速度(Hz )时间[sec] rpm48060400036072.0=⨯⨯2000个脉冲4-1-4 起动脉冲速度的设定将因负载的惯性惯量的大小而有所变化运转领域自起动领域转矩[N ·m]运转速度[r/min]最大同步转矩随着外部负载的转矩及转动惯量越大,所能瞬间启动的速度(自启动频率)越小。
4-1-5 加减速斜率的计算本公司的控制器,可以相对于单位时间的速度变化率来设定时间脉冲速度[kHz]-[kHz]]ms []kHz /ms [T R 起动脉冲速度运转脉冲速度加减速时间加减速常数5-1.请根据选择栏中的选项进行选择填空。
步进马达的特征是能根据所给的指令进行以()角度为单位的运行。
AC马达即使使用制动装置也会由于惯性发生(),而步进马达在构造上可根据角度单位运行,这个旋转角度被称为()。
在东方马达具有代表性的步进马达中,5相步进马达是根据()°的全步角,2相步进马达是根据()°的全步角来进行运行的。
【选择项】1.0.362.0.723.0.94.1.85.静止角度误差6.过转 7.时间8.一定9.步级角5-2.以下为步进马达运作时所需的系统构造的说明。
1 2 3 4请叙述上述各部件的作用。
1、2、3、4、5-3.请将下面的空格栏填写完整。
・如果10秒钟内产生了1000个脉冲、那么它的频率是()Hz。
・根据5相步进电动机配5比减速机的基本步距角、要其进行36°的运转需要()脉冲。
・5相步进电动机(整步)要使其达到600r/min的速度、其频率为()Hz5-4.判断题•步进电动机的上一步动作的误差会累积到下一步的动作中。
()•输入步进电动机的脉冲个数决定电动机的旋转量,输入步进电动机的脉冲频率决定电动机的运转速度。
()•步进电动机的转子是永磁铁,定子是电磁铁,根据定子部分各相线圈按照一定的激磁顺序通电后,可以吸引转子进行高精度的定位。
()•通入5相步进电动机的脉冲频率为500Hz,那么电动机输出轴的运转速度为6r/min。
()•步进电动机一通电就开始运转,根据给入的脉冲频率控制其后续的运转速度。
()客户回执单您的建议:___________________________________________________ ___________________________________________________ ___________________________________________________ ___________________________________________________ ___________________________________________________ ___________________________________________________ 公司名称姓名所属部门联络地址联络电话FAX#若您需要申请相关资料,请填写下列表单:。