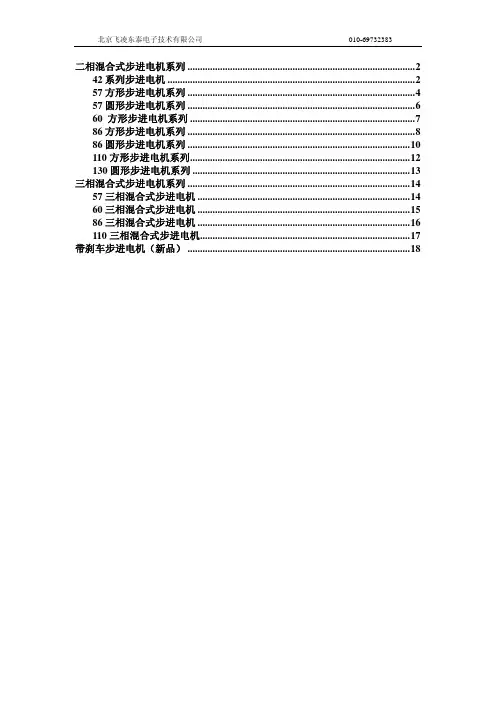
110mm三相交流步进电机选型资料
- 格式:pdf
- 大小:833.15 KB
- 文档页数:1

步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
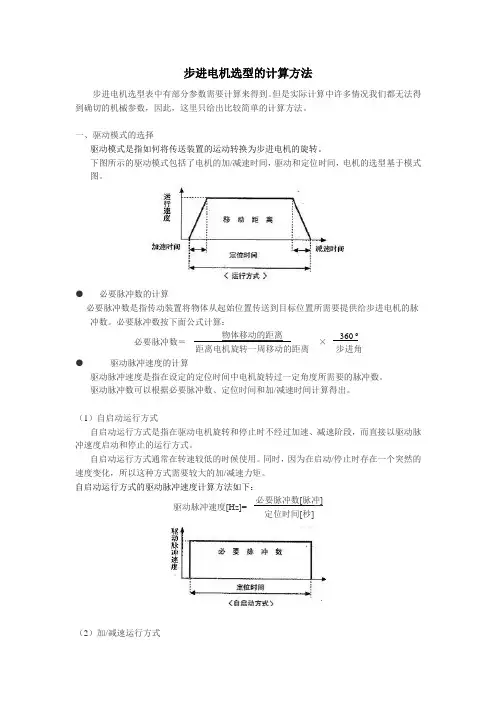
一、驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数[脉冲] 定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 定位时间[秒]-加/减速时间[秒]二、电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。

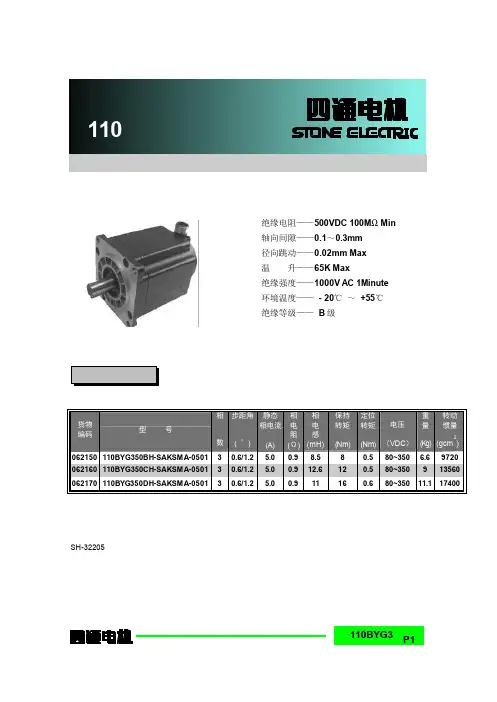
SJ-3H110MB 三相混合式步进电机细分驱动器一、性能简介SJ-3H110MB 三相混合式步进电机驱动器把交流伺服电机驱动器原理应用到步进电机驱动器中,输入的220VAC 经整流后产生325VDC ,再经调制器调制为325V 阶梯式正弦电流波形,每个阶梯对应电机转动一步,通过改变驱动器输出电流的频率来改变电机转速,而输出的阶梯数确定了电机转过的角度。
SJ-3H110MB 混合式步进电机驱动器,具有以下特点:1.采用交流伺服控制原理,在控制方式上增加了全数字式电流环控制,三相正弦电流驱动输出,使三相混合式电机低速无爬行,无共振区,噪音小。
2.驱动器功放级的电压达到DC325伏,步进电机高速运转仍然有高转矩输出。
3.具备短路、过压、欠压、过热等完善保护功能,可靠性高。
4.具有细分、半流和掉电相位记忆功能。
5.具有多种细分选择,可控制电机在任意细分状态下精确定位,最小步距角可设为0.036°(10000步/转)。
适用 面广,通过设置不同相电流可配置各种电机。
二、电气技术参数输入电源 AC220V -15%~+10% 50/60HZ 5.5A(MAX) 输出相电流 1.7A ~6.8A 适配电机 三相混合式步进电机工作环境 0℃~50℃ 15~85%RH 、不结露。
无腐蚀性、易燃、易爆、导电性气体、液体和粉尘。
存放环境 0℃~50℃ 15~85%RH 、不结露。
驱动方式 PWM (脉宽调制)恒流斩波,三相正弦波电流输出。
步距角 0.036°、0.045°、0.06°、 0.072°、0.09°、0.12°、0.15°、0.18°、0.225°、0.3°、0.36°、0.45°、0.6°、 0.72°、0.9°、1.8°电机步数 10000、8000、6000、5000、4000、3000、2400、2000、1600、1200、1000、800、600、500、400、200 步距角设定 DIP 开关(SW1.2.3.4) 输入信号 CP+/CP-;DIR+/DIR-;EN+/EN-输入电平 5V 时输入信号不需串电阻,12V 时串入1K 电阻,24V 时串入2K 电阻。
步进电机怎么选型,如何选择步进电机?步进电机用途相当广泛,其需求量也是相当的大。
作为采购和新入行的业务人员一定有很多疑问,比如步进电机怎么选型,或者如何选择步进电机。
小编就和您一起分享一下步进电机怎么选型,如何选择步进电机。
1、步进电机怎么选型,如何选择步进电机。
大家知道吗,步进电机转矩的选择步进电机的保持转矩,近似于传统电机所称的“功率”。
当然,有着本质的区别。
步进电机怎么选型,步进电动机的物理结构,完全不同于交流、直流电机,电机的输出功率是可变的。
如何选择步进电机。
通常根据需要的转矩大小(即所要带动物体的扭力大小),来选择哪种型号的电机。
大致说来,扭力在0.8N.m以下,选择20、28、35、39、42(电机的机身直径或方度,单位:mm);扭力在1N.m左右的,选择57电机较为合适。
扭力在几个N.m或更大的情况下,就要选择86、110、130等规格的步进电机。
2、如何选择步进电机,在选型过程中步过电机转速的选择对于电机的转速也要特别考虑。
因为,电机的输出转矩,与转速成反比。
就是说,步进电机在低速(每分钟几百转或更低转速,其输出转矩较大),在高速旋转状态的转矩(1000转/分--9000转)就很小了。
当然,有些工况环境需要高速电机,就要对步进电动机的线圈电阻、电感等指标进行衡量。
如何选择步进电机,选择电感稍小一些的电机,作为高速电机,能够获得较大输出转矩。
反之,要求低速大力矩的情况下,就要选择电感在十几或几十mH,电阻也要大一些为好。
3、步进电机怎么选型,步进电机空载起动频率的选择步进电机空载起动频率,通常称为“空起频率”。
这是选购电机比较重要的一项指标。
如果要求在瞬间频繁启动、停止,并且,转速在1000转/分钟左右(或更高),通常需要“加速启动”。
步进电机怎么选型,如果需要直接启动达到高速运转,最好选择反应式或永磁电机。
这些电机的“空起频率”都比较高。
4、步进电机怎么选型,步进电机的相数选择步进电机的相数选择,这项内容,很多客户几乎没有什么重视,大多是随便购买。
![步进电机的选用及电机型号、参数、尺寸标准[宝典]](https://uimg.taocdn.com/566677b1f424ccbff121dd36a32d7375a417c6c4.webp)
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmx大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(K g.cm.s2)J1、J2 ---齿轮惯量(K g.cm.s2)Js ----丝杆惯量(K g.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=M+M+Mt (1-3)M=(Jm+Jt).n/T× 1.02×10ˉ2(1-4)式中M ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(K g.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)M=(u.W.s)/(2πηi)×10ˉ2(1-5)M---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(P t.s)/(2πηi)×10ˉ2(1-6)Mt---切削力折算至电机力矩(N.m)P t---最大切削力(N)(4)负载起动频率估算。
步进电机的选型与计算在选型步进电机时,需要明确应用场景和需求。
首先,要了解步进电机的类型,包括反应式、永磁式和混合式三种。
每种类型都有其特点和应用领域,比如反应式步进电机结构简单、成本低,适用于对精度要求不高的场合;永磁式步进电机力矩大、精度高,适用于对精度要求较高的场合;混合式步进电机结合了反应式和永磁式的优点,但成本较高。
其次,要根据需求选择步进电机的参数,包括步距角、相数、电流等。
步距角指的是步进电机每接收一个脉冲信号,旋转的角度;相数指的是电机内部线圈的组数;电流则代表电机的功率。
这些参数的选择将直接影响电机的性能和输出效果。
在计算步进电机参数时,需要以下几个方面:1、计算转速:转速指的是步进电机每分钟旋转的圈数。
根据需求,选择合适的转速范围,以确保电机能够在正常工作条件下运行。
2、计算电压:电压是供给步进电机的电源电压。
根据电机的功率和电流,选择合适的电压值,以确保电机能够正常运转且不会过热。
3、计算功率:功率指的是步进电机的耗电情况。
根据电机的工作负载和转速,计算出所需的功率,以便选择合适的电源和驱动器。
在电路搭建方面,需要使用驱动器来控制步进电机的旋转。
根据不同的需求,可以选用不同的驱动器,如恒流驱动、恒压驱动等。
同时,还需要注意电路的图示和布局,以确保电源、驱动器和步进电机之间的连接正确可靠。
实验和仿真也是步进电机选型与计算过程中的重要环节。
通过实验,可以验证电机的旋转角度、速度和力矩是否符合要求;通过仿真,可以在实际制作之前对电路的性能进行评估和优化。
实验和仿真的结果将为最终方案的选择提供依据。
在应用过程中,还需注意以下事项:1、避免步进电机长时间处于高速状态:高速运转容易导致电机过热,可能影响其性能和使用寿命。
因此,要合理控制电机的转速,避免长时间的高速运转。
2、步进电机的维护和保养:定期检查电机的紧固件是否松动,轴承是否磨损,以及润滑情况等。
保持电机的清洁和干燥,以延长其使用寿命。
步进电机的选用电机型号、参数、尺寸标准步进电机的选用步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T×1.02×10ˉ2(1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)---电机所需达到的转速(r/min) nT---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ2(1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ2(1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
步进电机选型须知步进电机是一种作为控制用的特种电机,它的旋转是以固定的角度(称为“步距角”)一步一步运行的,其特点是没有积累误差(精度为百分之100),定位精度为每步X百分之5。
所以广泛应用于各种开环控制。
步进电机的运行要有一电子装置进行驱动,这种装置就是步进电机驱动器,它是把控制系统发出的脉冲信号转化为步进电机的角位移,或者说:控制系统每发一个脉冲信号,通过驱动器就使步进电机旋转一步距角。
所以步进电机的转速与脉冲信号的频率成正比。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
为了让更多的用户了解步进电机及步进电机驱动器,选择到最适合自己使用要求的步进电机和步进电机驱动器,特将有关选型原则介绍如下:(仅供参考)1. 首先确定步进电机拖动负载所需要的扭矩。
最简单的方法是在负载轴上加一杠杆,用弹簧秤拉动杠杆,拉力乘以力臂长度既是负载力矩。
M=fXs或者根据负载特性从理论上计算出来。
目前步进电机只标注最大静转距,步进电机的最大静转距不超过45Nm ,力矩越大,成本越高,如果您所选择的电机力矩较大或超过此范围,可以考虑加配减速装置。
2. 确定步进电机的最高运行转速。
转速指标在步进电机的选取时至关重要,步进电机的特性是随着电机转速的升高,扭矩下降,其下降的快慢和很多参数有关,如: 驱动器的驱动电压、电机的相电流、电机的相电感、电机大小等等,一般的规律是:驱动电压越高,力矩下降越慢;电机的相电流越大,力矩下降越慢。
在设计方案时,一般的规律应使电机的转速控制在几百转/分,当然高速也行,可以参考〈矩- 频特性〉。
3. 根据负载最大力矩和最高转速这两个重要指标,再参考〈矩- 频特性〉,就可以选择出适合自己的步进电机。
如果您认为自己选出的电机太大,可以考虑加配减速装置,这样可以节约成本,也可以使您的设计更灵活。
步进电机选型指南何为步进电机步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。
由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
雷赛步进电机系列雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。
如何选择合适的步进电机1. 负载分类:(1)Tf力矩负载:Tf = G·rG 重物重量 r 半径(2)TJ惯性负载:J = M(R12+R22)/ 32 (Kg·cm)M:质量R1:外径R2:内径TJ = J·dw/dt dw/dt 为角加速度2.力矩曲线图的说明力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明:1. 工作频率点:表示步进电机在该点的转速值。
单位:Hzn=Θ*Hz / (360*D)n 转/秒Hz 该点的频率值D 电路的细分值,Θ步进电机的步距角例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒2. 起动区域:步进电机可以直接起动或停止的区域。
3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。
同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。
4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。
5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。
6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。
7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。
由于运动惯性的原因,所以,运行力矩要比起动力矩大。
3 加速和减速运动的控制当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。
如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
(1)直线加速运动已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和加速脉频率F(t)A.确定TJ,一般TJ =70% Tm。
B.tr = 1.8*10-5*J*Θ*(F1-F0)/ (TJ-TL)C.F(t)=(F1-F0)*t/tr+F0, 0 < t < tr(2)指数加速运动已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和加速脉频率F(t)A.确定TJ0,TJ1一般TJ0 =70% Tm0,TJ1 =70% Tm1,TL=60%Tm1B.tr = F4*ln[(TJ0-TL)/(TJ1-TL)]C.F(t)=F2*[1-e^(-t/F4)]+F0, 0 < t < tr其中,F2=(TL-TJ0)*(F1-F0)/(TJ1-TJ0)F4=1.8*10-5*J*Θ*F2 /( TJ0-TL)J 为电机转子和负载的转动惯量,Θ为每一步的度数,整步运行时为电机步距角。
常用两相四线(1.8°)电机快速选型表:电机命名规则UI24XX—L—XX04(06)A(B)���○4○5○6○71.UIROBOT优爱宝步进马达2.两相四线马达3.马达的端面尺寸型号如:20/28/35/42/57/86/1104.马达长度如:39/47/565.相电流XX代表相电流为X.X A/相6.04代表引线数为4,06代表引线数为67.输出轴型式A:单出轴B:双出轴技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameterSpecificatio技术规格Technique机械尺寸Dimensions。
ST系列交流伺服电机型号编号说明110 ST -M 050 30 L F 8 1〒-TT 丁可可〒〒育1:表示电机外径,单位:mm。
2 :表示电机是正弦波驱动的永磁同步交流伺服电机。
3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。
4 :表示电机零速转矩,其值为三位数X 0.1,单位:Nm。
5 :表示电机额定转速,其值为二位数x 100,单位:rpm。
6:表示电机适配的驱动器工作电压,L—AC220V,H —AC380V。
7 :表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T ),R—1对极旋转变压器8 :表示电机类型,B —基本型。
9 :表示电机安装了失电制动器。
SD系列交流伺服驱动器型号编号说明SD 30 MNT T 丁1 :表示采用空间矢量调制方式(SVPWM )的交流伺服驱动器2 :表示IPM 模块的额定电流(15/20/30/50/75A )3 :表示功能代码(M :数字量与模拟量兼容)•交流伺服电机与伺服驱动器适配表电机型号110ST-M0203110ST-M0403110ST-M0503110ST-M0602!110ST-M0603功率(KW0.6 1.2 1.5 1.2 1.6额定转矩(Nn)2 4 5 6 6额定转速(Rpm 32000 3000额定电流(A)4.05.06.0 6.0 8.0转子惯量2(Kgm)0.33 X 10-30.65 X 10-30.82 X 10-3 1.0 X 10-3 1.0 X 10-3机械时间常数(MS3.64 2.32 2.03 1.82 1.822500C/T(A、B Z、U V、W)电机绕 组插座 绕组引线 插座编号编码器 插座插座编号 5V 0V A+ A- B+ B- Z+ Z- U+ U- V+ V- W+ W-地10 13 11 14 12 15 1失电制 动器插座编号24VDC (-15%〜+10%基本参数工作电流:w 0.6A 制动转矩:》8Nm 转动惯量:编码器 线数 (C/T )电机型 号 130ST-M0402 5 130ST-M0502 5 130ST-M0602 130ST-M0772 130ST-M0773 0 功率 (KW 额定转 矩 (Nm 额定转 速 (Rpm额定电流 (A ) 转子惯量(Kgrn )机械时 间常数 (MS 编码器 线数(C/T )电机绕 组插座 编码器 插座 失电制 动器1.01.31.5 1.67.7 25 4.0 30.85 X 10-3.75 绕组引线 插座编号插座编号 插座编号2.47.7000 30005.06.0 6.0 9.031.06 X 10-31.26 X 10-31.58 X 10-31.58 X 10-3.07 2.83 2.44 2.442500C/T (A 、B Z 、U V 、W )5V 0V A+ A- B+ B- Z+ Z- U+ U-V+ V- W+ W-地 9 1013 1114 12 15 124VDC (-15%〜+10%0.64 X 10-4Kgrn电机绝 缘等级 B使用环 境 环境温度:0〜55C 湿度:小于90°(无结露)防护等 级 IP65电机重 量 (Kg)4.25.2 5.86.4 6.4130系列电机参数表交流伺服电机与伺服驱动器安装尺寸ST系列交流伺服电机安装尺寸110瘵刿电机空1eAC HI)I.U I2DA>i 給cwn MO (^12>ill g)押刚 1 ll«13415&T. T ri>畑.k.L9S 1237 >2iyJ367 <110 ) HE HO ll l tasI :i vSD15M伺服驱动器安装尺寸' --- h\■? 0 1---- 」丄AlyA^—"罰SCN1电机悟号反馈「一214.5CT |/ 百L牛m崗 1 111卄r U C T S 50 函111Q匸巧电机伯号反谢CNT超制伯号輔瓦SD20MNG50MN卅>刀斗131我£駅MMfe,相关标签:电机,伺服电机, 相关产品WA-99UZ■■■■■■■■■ IS 口 口 團冏号矗・・购訶越回a El E3 H EIE3HBIIRISI □ HWA-97TY步进电机的简单原相关新闻2011电源管理及LED精彩方案且看海默科技2011年03月18日安森美半导体将在IlC-China 2011 展出多种高能效方案2011年03月18日步进电机发热问题及对策2011年03月18日泽野驱动器2011隆重上市2011年03月18日Allegro推出汽车级可编程双极步进电动机驱动器IC2011年03月18日泽野电机34系列步进电机上市2011年03月15日步进电机14问2011年03月15日用集成脉冲输岀触发步进电机驱动器2011年03月15日白山机电一DM系列产品荣登2011SIAF展2011年03月15日加快电机动力系统技术创新2011年03月15日交流伺服系统在许多性能方面都优于步进电机2011年03月09日交流伺服电机传动技术实现了高精度的位置控制2011年03月09日低速大扭矩交流伺服电机驱动单螺杆挤岀机2011年03月09日北仑伺服电机产业蓬勃兴起2011年03月09日伺服电机与变频电机的区别2011年03月09日哈电填补世界“百万级”水轮发电机通风技术空白2011年03月02日日本电器零售商山田电机6月进津2011年03月02日联宜电机续发行0.5亿元短期融资券2011年03月02日对决:优派Pro8200vs 三菱电机HC4000 2011年03月02日三菱电机放电加工机技术交流会举办2011年03月02日步进电机和交流伺服电机性能比较2011年01月14日三菱电梯创新成产业发展新动力2011年01月14日威力变频洗衣机智能洗涤更节能2011年01月14日西门子电气传动有限公司牵引电机及风力发电机扩大产能2011年01月14日交流伺服电机传动技术实现了高精度的位置控制2011年01月12伺服电机被步进脉冲控制的优点2011年01月12日2010年推出具有运动控制功能的伺服专用芯片2011年01月12伺服电机满足运动过程中精准的控制方式2011 年01 月12环形变压器的应用指南2011年01月12日雷赛:步进伺服专家运动控制先锋2011年01月07日交流伺服电机传动技术实现了高精度的位置控制2011年01月07瑞萨电子32位MCU在伺服电机中的应用2011年01月07日申力步进电机二相八线接线方法2011年01月07日如何用简单的方法调整两相步进电机通电后的转动方向2011 年01 月05日一种步进电机及其驱动器干扰问题解决措施2011 年01 月05第14届中国(国际)小电机展掠影2011年01月05日线切割机床驱动选型支招2011年01月05日步进马达市场总结分析及发展趋势2010年12月31日步进电机应用F.A.Q 2010年12月31日运动控制系统简介2010年12 月31 日发现步进电机定位不准怎么办2010年12月31日何为驱动器的细分2010年12 月31 日步进电机使用时的注意事项2010年12月29日解决步进电机干拢问题的发法2010年12月29日关于步进电机的发热2010年12月29日关于步进电机和伺服电机的区别2010年12月29日乐创自动化推出三相混合式步进电机驱动器2010 年12 月29步进电机原理及使用说明2010年12月22日步进电机控制器的设计2010年12月22日一体化步进电机驱动器2010年12月22日作为机床通信中心的Sinumerik 2010年12月22日2010年12月15日2010年12月15日2010年12月08日2010 年 11 月 242010年11月24日2010年11月03日 2010年11月01日 2010年10月21日申力步进电机二相八线接线方法 步进电机的种类和特点三洋开始量产号称全球转换率最高山社电机株式会社开拓中国市场申力步进电机二相八线接线方法 步进电机的一些基本参数步进电机驱动器的故障分析 步进电机的最新技术发展60ST-M 系列交流伺服电机技术参详 绝缘电阻—— 500VDC 100MW Min 绝缘强度—— 1500VAC 1Mi nute 环境温度-20 C 〜+50 C绝缘等级一一B 级60ST-M 系列交流伺服电机优点1、 无电刷和换向器,因此工作可靠,对维护和保养要求低。