3、机器人的位姿描述与坐标变换
- 格式:ppt
- 大小:1.30 MB
- 文档页数:62

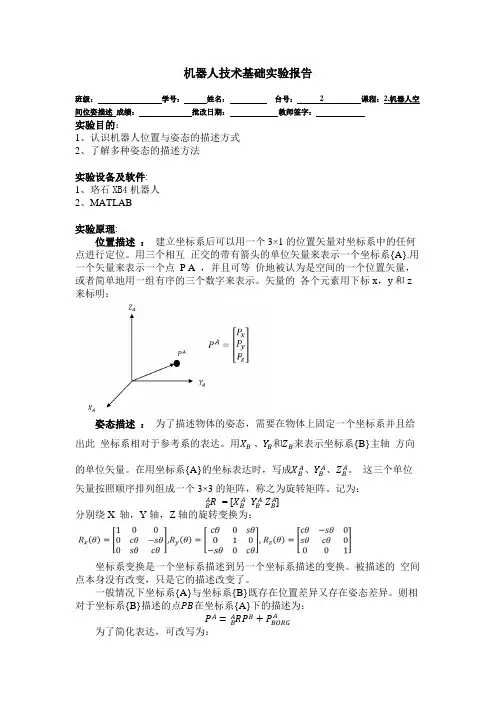
机器人技术基础实验报告班级:学号:姓名:台号: 2 课程:2.机器人空间位姿描述成绩:批改日期:教师签字:实验目的:1、认识机器人位置与姿态的描述方式2、了解多种姿态的描述方法实验设备及软件:1、珞石XB4机器人2、MATLAB实验原理:位置描述:建立坐标系后可以用一个3×1的位置矢量对坐标系中的任何点进行定位。
用三个相互正交的带有箭头的单位矢量来表示一个坐标系{A}.用一个矢量来表示一个点P A ,并且可等价地被认为是空间的一个位置矢量,或者简单地用一组有序的三个数字来表示。
矢量的各个元素用下标x,y和z 来标明:姿态描述:为了描述物体的姿态,需要在物体上固定一个坐标系并且给出此坐标系相对于参考系的表达。
用X B 、Y B和Z B来表示坐标系{B}主轴方向的单位矢量。
在用坐标系{A}的坐标表达时,写成X B A、Y B A、Z B A。
这三个单位矢量按照顺序排列组成一个3×3的矩阵,称之为旋转矩阵。
记为:R B A= [X B A Y B A Z B A]分别绕X 轴,Y轴,Z轴的旋转变换为:坐标系变换是一个坐标系描述到另一个坐标系描述的变换。
被描述的空间点本身没有改变,只是它的描述改变了。
一般情况下坐标系{A}与坐标系{B}既存在位置差异又存在姿态差异。
则相对于坐标系{B}描述的点PB在坐标系{A}下的描述为:AP A=R B A P B+P BORG为了简化表达,可改写为:[P A1]=[R B A P BORG A 01][P B 1]=T B A[P B 1] 其中T B A =[RB A P BORGA01]为4×4矩阵,称为齐次变换矩阵。
描述了坐标系{B} 相对于坐标系{A}的变换。
姿态其他描述: X-Y-Z 固定角 等效转轴表示法 X-Y-Z 欧拉角 四元素法 1、X-Y-Z 固定角:坐标系{B}的方位规则如下:最初坐标系{B}与{A}重合,转动相对固定坐标系{A}来描述,先绕X A 轴转γ 角 ,再绕Y A 轴转β角,最后绕Z A 轴转α角。
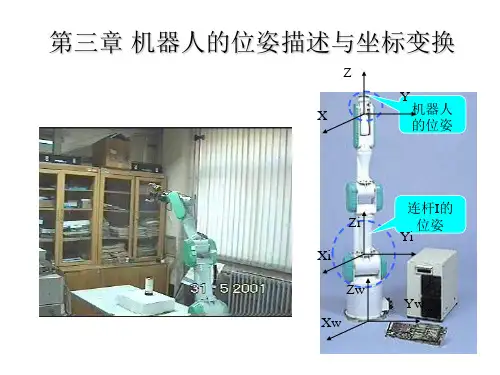
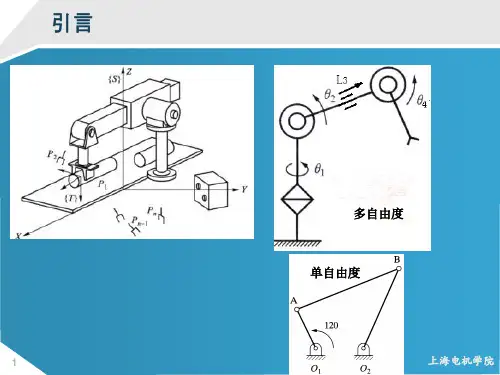
机器人学第二章机器人的位姿描述与坐标变换战强北京航空航天大学机器人研究所第二章 机器人的位姿描述与坐标变换 机器人的位姿连杆I 的位姿YX ZYi XiZi YwXwZw2-1、基本概念1) 自由度(Degree of Freedom, DOF):指一个点或一个物体运动的方式,或一个动态系统的变化方式。
每个自由度可表示一个独立的变量,而利用所有的自由度,就可完全规定所研究的一个物体或一个系统的位置和姿态。
也指描述物体运动所需的独立坐标数,3维空间需要6个自由度。
2) 操作臂(Manipulator):具有和人手臂(Arm)相似的功能、可在空间抓放物体或进行其它操作的机电装置。
----Arm3) 末端执行器(End-Effector):位于机器人腕部的末端,直接执行工作要求的装置。
如灵巧手、夹持器。
----Hand/Gripper4) 手腕(Wrist):位于执行器与手臂之间,具有支撑和调整末端执行器姿态功能的机构。
操作臂的组成部分之一。
5)手臂(Arm):位于基座和手腕之间,由操作手的动力关节和连杆等组成的组件。
能支撑手腕和末端执行器,并具有调整末端执行器位置的功能。
操作臂的组成部分。
Outdated!6) 世界坐标系(World Coordinate System):参照地球的直角坐标系。
7)机座坐标系、基坐标系(Base reference coordinate system):参照机器人基座的坐标系,即机器人末端位姿的参考坐标系。
8)坐标变换(Coordinate Transformation):将一个点的坐标描述从一个坐标系转换到另一个坐标系下描述的过程。
手腕机座手臂Yw XwZw9)位姿(Position&Pose):机器人末端执行器在指定坐标系中的位置和姿态。
10)工作空间(Working Space):机器人在执行任务时,其腕轴交点能在空间活动的范围。
由连杆尺寸和构形决定。