齐次变换法 矢量法
位姿描述
旋量法 四元数法
5
上海电机学院
位姿描述——点的位置描述
1.点的位置描述{位置矢量}
对于直角坐标系{A},空间任一点P的位置可用3×1的列矢量 表示。
px
A
P
p
y
pz
AP的上标A代表参考坐标系{A}。
6
上海电机学院
位姿描述——姿态的描述(旋转矩阵)
姿态可由某个固连于此物体的坐标系描述。 BAR [AxB ,AyB, A zB ]
nx ox ax
A B
R
ny
oy
a
y
nz oz az
旋转矩阵
7
上海电机学院
位姿描述——姿态的描述(旋转矩阵)
nx ox ax cos(n, x) cos(o, x) cos(a, x)
A B
R
ny
oy
a
y
cos(n,
y)
cos(o, y)
cos(a, y)
nz oz az cos(n, z) cos(o, z) cos(a, z)
(1)点的齐次坐标
px
AP
py
pz
齐次坐标
px
p
y
pz
1
注意: 齐次坐标的表示不是惟一的。
P px py pz 1 T px py pz T a b c T
11
上海电机学院
位姿描述——齐次坐标
规定:
(1) (4×1)列阵[a b c ω]T中第四个元素不为零,则表示空间某点的 位置;
14
上海电机学院
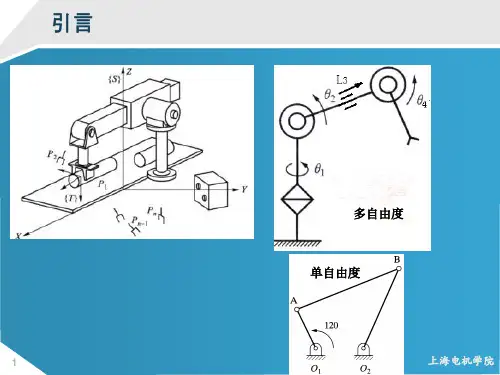
位姿描述——动坐标系位姿的描述
静系
在机器人坐标系中,运动时相对 于连杆不动的坐标系称为静坐标

位姿描述与齐次变换PPT](https://uimg.taocdn.com/711ba841caaedd3383c4d3c4.webp)